Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Nonlinear Dynamics in Electric Circuits (10 Points) : TheoryDocumento4 pagineNonlinear Dynamics in Electric Circuits (10 Points) : TheoryBhawna SharmaNessuna valutazione finora
- Properties of Matter - Question PaperDocumento10 pagineProperties of Matter - Question PaperBhawna SharmaNessuna valutazione finora
- BOC Complete 1 To 5 DPPDocumento5 pagineBOC Complete 1 To 5 DPPBhawna SharmaNessuna valutazione finora
- Physics Paper - Ii (Solution)Documento4 paginePhysics Paper - Ii (Solution)Bhawna SharmaNessuna valutazione finora
- Part Test 1 PDFDocumento31 paginePart Test 1 PDFBhawna SharmaNessuna valutazione finora
- Mathematics Paper - 1 (Question Paper) FINALDocumento3 pagineMathematics Paper - 1 (Question Paper) FINALBhawna SharmaNessuna valutazione finora
- Ellipse TWT Single Choice TypeDocumento6 pagineEllipse TWT Single Choice TypeBhawna SharmaNessuna valutazione finora
- Paper - I (Question Paper)Documento8 paginePaper - I (Question Paper)Bhawna SharmaNessuna valutazione finora
- Electrostatics: 1 Introduction To Electric ChargeDocumento34 pagineElectrostatics: 1 Introduction To Electric ChargeBhawna SharmaNessuna valutazione finora
- Ranklist Online TWT Main (2019-21) (Dt. 12-07-2020)Documento7 pagineRanklist Online TWT Main (2019-21) (Dt. 12-07-2020)Bhawna SharmaNessuna valutazione finora
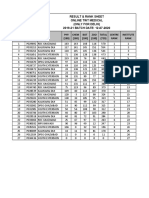
- Ranklist Online TWT Medical (2019-21) (Dt. 12-07-2020) Only For DelhiDocumento1 paginaRanklist Online TWT Medical (2019-21) (Dt. 12-07-2020) Only For DelhiBhawna SharmaNessuna valutazione finora
- M14 - Indefinite IntegrationDocumento24 pagineM14 - Indefinite IntegrationBhawna SharmaNessuna valutazione finora
- P-10, Crash Course Assignment (Electrostatics)Documento5 pagineP-10, Crash Course Assignment (Electrostatics)Bhawna SharmaNessuna valutazione finora
- Rank List Aits - 3 (Advanced) Jee 2019 DT 31-01-2019Documento5 pagineRank List Aits - 3 (Advanced) Jee 2019 DT 31-01-2019Bhawna SharmaNessuna valutazione finora
- Quadratic & Inequation - QDocumento3 pagineQuadratic & Inequation - QBhawna SharmaNessuna valutazione finora
- Section-I (Single Answer Correct Type)Documento4 pagineSection-I (Single Answer Correct Type)Bhawna SharmaNessuna valutazione finora
- Ranklist Online TWT Advanced (Dt. 2019-21) (Dt. 02-08-2020)Documento16 pagineRanklist Online TWT Advanced (Dt. 2019-21) (Dt. 02-08-2020)Bhawna SharmaNessuna valutazione finora
- Online TWT Advanced DT 03-08-2018 2017-19 BatchDocumento5 pagineOnline TWT Advanced DT 03-08-2018 2017-19 BatchBhawna SharmaNessuna valutazione finora
- Section-I (Single Answer Correct Type) : Mumbai / Akola / Delhi / Kolkata / Ghaziabad / Nashik / Goa / Bokaro / PuneDocumento7 pagineSection-I (Single Answer Correct Type) : Mumbai / Akola / Delhi / Kolkata / Ghaziabad / Nashik / Goa / Bokaro / PuneBhawna SharmaNessuna valutazione finora
- Permutation & Combinations (Question Paper) - 01Documento4 paginePermutation & Combinations (Question Paper) - 01Bhawna SharmaNessuna valutazione finora
- SECTION-I (Single Choice Questions)Documento6 pagineSECTION-I (Single Choice Questions)Bhawna SharmaNessuna valutazione finora
- SECTION-I (Multiple Choice Questions)Documento5 pagineSECTION-I (Multiple Choice Questions)Bhawna SharmaNessuna valutazione finora
- Part Test 4Documento36 paginePart Test 4Bhawna SharmaNessuna valutazione finora
- Gravitation, Mechanical Prop. & Fluid Dynamics (Q)Documento8 pagineGravitation, Mechanical Prop. & Fluid Dynamics (Q)Bhawna SharmaNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Symmetries, Lie Algebras and Representations: A Graduate Course For PhysicistsDocumento7 pagineSymmetries, Lie Algebras and Representations: A Graduate Course For Physicistskdl1187056915Nessuna valutazione finora
- 7.6 Superpostions of Stationary StatesDocumento9 pagine7.6 Superpostions of Stationary StatesVia Monica DeviNessuna valutazione finora
- Landau Theory and Martensitic Phase TransitionsDocumento14 pagineLandau Theory and Martensitic Phase TransitionsPrevalisNessuna valutazione finora
- Boltzmann's and Saha's EquationsDocumento22 pagineBoltzmann's and Saha's Equationssujayan2005Nessuna valutazione finora
- Ch12 Multiple IntegralsDocumento59 pagineCh12 Multiple Integralsujjwal2110Nessuna valutazione finora
- 00 Chapter 2 - Manipulating Light States by Single-Photon Addition and SubtractionDocumento44 pagine00 Chapter 2 - Manipulating Light States by Single-Photon Addition and SubtractionAlan AlcantarNessuna valutazione finora
- (Duff) - Kaluza-Klein Theory in PerspectiveDocumento38 pagine(Duff) - Kaluza-Klein Theory in Perspectivemasaud rejaliNessuna valutazione finora
- Maths For Physics PDFDocumento249 pagineMaths For Physics PDFAbhi Sharma100% (1)
- Physics-12-Ch 11 & 12 & 13-Solns PDFDocumento134 paginePhysics-12-Ch 11 & 12 & 13-Solns PDFax1leNessuna valutazione finora
- Grade 9 2Documento2 pagineGrade 9 2king devesfruto100% (1)
- Sci 9 DLL Q2 W1Documento6 pagineSci 9 DLL Q2 W1Nomar Maigue DarNessuna valutazione finora
- TM - Pbe-Mt Fhi - UPFDocumento68 pagineTM - Pbe-Mt Fhi - UPFarnoldNessuna valutazione finora
- Vector Calculus Independent Study Unit 6: Double and Triple IntegralsDocumento3 pagineVector Calculus Independent Study Unit 6: Double and Triple IntegralsAdil ShafiqNessuna valutazione finora
- MetII PDFDocumento8 pagineMetII PDFMadara SantosNessuna valutazione finora
- MTL101:: Tutorial 2:: Linear AlgebraDocumento1 paginaMTL101:: Tutorial 2:: Linear AlgebraKuldeep MalNessuna valutazione finora
- Mit18 06scf11 Ses2.8sumDocumento4 pagineMit18 06scf11 Ses2.8sumnarendraNessuna valutazione finora
- Ce1403 - Basics of Dynamics and Aseismic Design (For Vii - Semester)Documento5 pagineCe1403 - Basics of Dynamics and Aseismic Design (For Vii - Semester)KarnalPreethNessuna valutazione finora
- Problems SetDocumento10 pagineProblems SetSajith KurianNessuna valutazione finora
- Models: 1, Condensations in Expanding CosmologicDocumento3 pagineModels: 1, Condensations in Expanding CosmologicsayanNessuna valutazione finora
- Electric Charges and Fields Fomulae Sheet NewDocumento2 pagineElectric Charges and Fields Fomulae Sheet NewSuresh JangraNessuna valutazione finora
- SusskindDocumento6 pagineSusskinddavid.contatos4308Nessuna valutazione finora
- Script in Earth ScienceDocumento3 pagineScript in Earth ScienceJet acostaNessuna valutazione finora
- Cavity Optomagnonics: Silvia Viola KusminskiyDocumento51 pagineCavity Optomagnonics: Silvia Viola KusminskiyRaghvendra PratapNessuna valutazione finora
- Lesson Plan (Subatomic Particles)Documento6 pagineLesson Plan (Subatomic Particles)Gomez Agustin Leslie100% (1)
- Math XI Complex NumbersDocumento2 pagineMath XI Complex Numberskjsc ncsdNessuna valutazione finora
- Atomic Structure: Chapter - 1Documento14 pagineAtomic Structure: Chapter - 1Cube WorldNessuna valutazione finora
- Lect 1-2Documento45 pagineLect 1-2Tyrion LannisterNessuna valutazione finora
- QM MechanicsDocumento53 pagineQM MechanicsAK KumarNessuna valutazione finora
- UntitledDocumento118 pagineUntitledARYAN PANDANessuna valutazione finora
- Important Questions For CBSE Class 12 Maths Chapter 3Documento13 pagineImportant Questions For CBSE Class 12 Maths Chapter 3todiwov781Nessuna valutazione finora