Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Teacher Development StagesDocumento1 paginaTeacher Development StagesMary TingNessuna valutazione finora
- Tesda Circular s.2016 Re Revised Process Cycle Time and Requirements For Program RegistrationDocumento51 pagineTesda Circular s.2016 Re Revised Process Cycle Time and Requirements For Program Registrationteabagman100% (3)
- RUBRIC Circulatory-SystemDocumento2 pagineRUBRIC Circulatory-SystemJerry ElivxNessuna valutazione finora
- Signature Assignment Reflection Paper Julia BarrettDocumento7 pagineSignature Assignment Reflection Paper Julia Barrettapi-533880820Nessuna valutazione finora
- Orca Share Media1607162916473 6740929849216331544Documento5 pagineOrca Share Media1607162916473 6740929849216331544Angela Nicole GarnaceNessuna valutazione finora
- Universidad Pedagógica Nacional Francisco Morazán: DatesDocumento1 paginaUniversidad Pedagógica Nacional Francisco Morazán: DatesLuis AlmendarezNessuna valutazione finora
- Learning Episode 17 Assessment OF FOR AS LearningDocumento8 pagineLearning Episode 17 Assessment OF FOR AS LearningAngel Allera MananganNessuna valutazione finora
- Formulate A Statement of Opinion or AssertionDocumento4 pagineFormulate A Statement of Opinion or AssertionJoeson MejicaNessuna valutazione finora
- Catch Up StrategyDocumento3 pagineCatch Up StrategyDiana OstrovanNessuna valutazione finora
- Lesson Plan Template 1 2Documento4 pagineLesson Plan Template 1 2api-391628725Nessuna valutazione finora
- Deped Order No. 42, S. 2016Documento5 pagineDeped Order No. 42, S. 2016marvin agubanNessuna valutazione finora
- Critical Thinking Essentials for Teaching MathematicsDocumento5 pagineCritical Thinking Essentials for Teaching Mathematics29RlCll8045 SITI QOMARIAHNessuna valutazione finora
- Cot Tool T1-T3 2021-2022Documento2 pagineCot Tool T1-T3 2021-2022patricia luzNessuna valutazione finora
- Session Plan: Gov. Pascual, Brgy. Baritan, Malabon CityDocumento11 pagineSession Plan: Gov. Pascual, Brgy. Baritan, Malabon CitymarkNessuna valutazione finora
- DOT CALABARZON – GO NEGOSYO KAPATID MENTOR ME PROGRAMDocumento1 paginaDOT CALABARZON – GO NEGOSYO KAPATID MENTOR ME PROGRAMAgnes De Guzman FranciaNessuna valutazione finora
- Jurnal Internasional SBM KimiaDocumento17 pagineJurnal Internasional SBM KimiaAgustina ItinNessuna valutazione finora
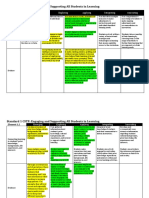
- Standard 1 CSTP: Engaging and Supporting All Students in LearningDocumento6 pagineStandard 1 CSTP: Engaging and Supporting All Students in LearningWendy EvansNessuna valutazione finora
- Academic Audit in SchoolsDocumento2 pagineAcademic Audit in SchoolsDr Dheeraj Mehrotra100% (2)
- ELLNP DAP Accomplishment Report 2019 2020Documento2 pagineELLNP DAP Accomplishment Report 2019 2020Marieta Soriano100% (1)
- Most Important Component of Instructional PlanningDocumento2 pagineMost Important Component of Instructional PlanningMAY ANN CATIPONNessuna valutazione finora
- At the Zoo LessonDocumento3 pagineAt the Zoo LessonAndreea Cristina FunariuNessuna valutazione finora
- Year 1Documento2 pagineYear 1saeedrayyan022Nessuna valutazione finora
- Narrative Report On DEAR and Catch Up FridayDocumento2 pagineNarrative Report On DEAR and Catch Up FridayArthur Tayaan92% (77)
- Comparing The Effectiveness of Classroom and Online Learning in Grade 11 HumssDocumento5 pagineComparing The Effectiveness of Classroom and Online Learning in Grade 11 HumssNiño Gabriel MagnoNessuna valutazione finora
- Cookery Week 6-Day2Documento3 pagineCookery Week 6-Day2raymond marcos100% (1)
- Lesson Plan in KindergartenDocumento8 pagineLesson Plan in KindergartenJenelyn Abante RequiremeNessuna valutazione finora
- Walang Pamagat Na DokumentoDocumento5 pagineWalang Pamagat Na DokumentoIan Khierwin PalacpacNessuna valutazione finora
- Portfolio AssessmentDocumento49 paginePortfolio AssessmentJasmin Daro0% (1)
- Assesment Plan 4Documento2 pagineAssesment Plan 4carren salenNessuna valutazione finora
- Game Based Learning Literature Mastery LearningDocumento14 pagineGame Based Learning Literature Mastery LearningMaxhill CollegeNessuna valutazione finora