Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- FAQs - G7, GRACoL, ISO 12647-2 PDFDocumento5 pagineFAQs - G7, GRACoL, ISO 12647-2 PDFSappiETC50% (2)
- Excitation & Propulsion ControlDocumento3 pagineExcitation & Propulsion ControlP. S. VENUGOPALNessuna valutazione finora
- AG Voltage ControlDocumento6 pagineAG Voltage ControlP. S. VENUGOPALNessuna valutazione finora
- TFC SCOR LectureDocumento23 pagineTFC SCOR LectureP. S. VENUGOPALNessuna valutazione finora
- Power PackDocumento28 paginePower PackP. S. VENUGOPALNessuna valutazione finora
- 12 Air Brake Self Test MedhaDocumento14 pagine12 Air Brake Self Test MedhaP. S. VENUGOPAL100% (1)
- 3B) F1-Dir BrakeDocumento1 pagina3B) F1-Dir BrakeP. S. VENUGOPALNessuna valutazione finora
- Air Brake Self TestDocumento12 pagineAir Brake Self TestP. S. VENUGOPALNessuna valutazione finora
- Lead and Trail SwitchDocumento19 pagineLead and Trail SwitchP. S. VENUGOPALNessuna valutazione finora
- Fuel Economy An ExplanationDocumento10 pagineFuel Economy An ExplanationP. S. VENUGOPALNessuna valutazione finora
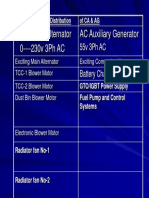
- 5-B) CA & AG Power DistributionDocumento1 pagina5-B) CA & AG Power DistributionP. S. VENUGOPALNessuna valutazione finora
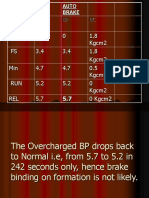
- 3A) F2-Auto Brake Position.Documento2 pagine3A) F2-Auto Brake Position.P. S. VENUGOPALNessuna valutazione finora
- 3B) F1-Dir BrakeDocumento1 pagina3B) F1-Dir BrakeP. S. VENUGOPALNessuna valutazione finora
- Loco Inspector Technical DiaryDocumento30 pagineLoco Inspector Technical DiaryP. S. VENUGOPAL100% (2)
- Bheem: 5500 HP Freight LocomotiveDocumento18 pagineBheem: 5500 HP Freight LocomotiveP. S. VENUGOPALNessuna valutazione finora
- 4 - Recycling of Circuit Breakers IN HHP LOCOMOTIVEDocumento9 pagine4 - Recycling of Circuit Breakers IN HHP LOCOMOTIVEP. S. VENUGOPALNessuna valutazione finora
- 6-A) J-Air Brake Self TestDocumento23 pagine6-A) J-Air Brake Self TestP. S. VENUGOPALNessuna valutazione finora
- 2) Cranking ProcedureDocumento21 pagine2) Cranking ProcedureP. S. VENUGOPALNessuna valutazione finora
- Frequency AdverbsDocumento4 pagineFrequency AdverbsAlexander ScrNessuna valutazione finora
- Numbers (0, 1, 2, 3,... ) Are Defined To Be Natural Numbers, Including Zero, That Does Not ContainDocumento9 pagineNumbers (0, 1, 2, 3,... ) Are Defined To Be Natural Numbers, Including Zero, That Does Not ContainRomela EspedidoNessuna valutazione finora
- Assignment 1Documento3 pagineAssignment 1Carolyn WangNessuna valutazione finora
- Assigment Comouter Science BSCDocumento3 pagineAssigment Comouter Science BSCutkarsh9978100% (1)
- Ce2202 - Mechanics of FluidsDocumento3 pagineCe2202 - Mechanics of FluidsPrashant GaradNessuna valutazione finora
- 8.2.2.2.1.1 Batch Operation ManagementDocumento10 pagine8.2.2.2.1.1 Batch Operation ManagementbernardNessuna valutazione finora
- Quantities Survey MethodsDocumento73 pagineQuantities Survey MethodsparvezNessuna valutazione finora
- Excel Formulas and Functions 2021-The Intermediate Level Step byDocumento122 pagineExcel Formulas and Functions 2021-The Intermediate Level Step bymaolegu100% (3)
- CREEP AND FATIGUE FAILURE ANALYSIS OF TURBINE BLADE REPORT-2 (Final)Documento28 pagineCREEP AND FATIGUE FAILURE ANALYSIS OF TURBINE BLADE REPORT-2 (Final)akshithaNessuna valutazione finora
- PR100 BrochureDocumento28 paginePR100 Brochuregus289Nessuna valutazione finora
- PC - Section 1.3 - Worksheet PDFDocumento2 paginePC - Section 1.3 - Worksheet PDFAnabbNessuna valutazione finora
- Italy CasestudyDocumento21 pagineItaly CasestudylozaNessuna valutazione finora
- HST TrainingDocumento11 pagineHST TrainingRamesh BabuNessuna valutazione finora
- Dawn C. Meredith, Meaning MakingDocumento2 pagineDawn C. Meredith, Meaning MakingMrsriyansyahNessuna valutazione finora
- Ball Charge ManagementDocumento14 pagineBall Charge ManagementSalud Y SucesosNessuna valutazione finora
- Math Formula SheetDocumento8 pagineMath Formula SheetHidayah TeacherNessuna valutazione finora
- Configuration A: Unloaded BJT Transistor AmplifiersDocumento3 pagineConfiguration A: Unloaded BJT Transistor AmplifiersdasdNessuna valutazione finora
- ORC - Airbag SystemDocumento13 pagineORC - Airbag SystemGarikoitz FranciscoeneNessuna valutazione finora
- Bent's RuleDocumento3 pagineBent's RuleEdwinNessuna valutazione finora
- DelhiDocumento44 pagineDelhiIndia TreadingNessuna valutazione finora
- Ee-502 Unit - IDocumento2 pagineEe-502 Unit - IVARAPRASADNessuna valutazione finora
- 2nd Grading LAA Grade 10Documento54 pagine2nd Grading LAA Grade 10Urduja Kyle OdiacerNessuna valutazione finora
- Best Approach: Compound AngleDocumento8 pagineBest Approach: Compound AngleAbhiyanshu KumarNessuna valutazione finora
- 10048-PAVE-RPT-0101 Types of The Vehicle Considered, Vehicle Details and Single Equivalent Load and Reprtions of LoadDocumento14 pagine10048-PAVE-RPT-0101 Types of The Vehicle Considered, Vehicle Details and Single Equivalent Load and Reprtions of LoaddarshanNessuna valutazione finora
- Nav 2000Documento4 pagineNav 2000Balaji TriplantNessuna valutazione finora
- TR 94 13Documento25 pagineTR 94 13Christian Norambuena VallejosNessuna valutazione finora
- Course 4 EDocumento45 pagineCourse 4 ESzabolcs KovacsNessuna valutazione finora
- Nozzle Loads - Part 2 - Piping-EngineeringDocumento3 pagineNozzle Loads - Part 2 - Piping-EngineeringShaikh AftabNessuna valutazione finora
- Unit 6 - EarthingDocumento26 pagineUnit 6 - Earthinggautam100% (1)