Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Robot Movil FPGA
Caricato da
Giovanni Gomez MoralesTitolo originale
Copyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
Robot Movil FPGA
Caricato da
Giovanni Gomez MoralesCopyright:
Formati disponibili
ROBOT INTELIGENTE CON FPGA
Fernández Rubio Abraham
bossx5@hotmail.com
ÍNDICE
Pagina
1. Resumen 3
2. Síntesis y Consecuencias 3
3. Antecedentes 3
3.1 Chip ADN Electrónico 3
3.2 Reglas en Circuitos Configurables 3
3.3 Mapa Entrada / Salida (E/S) 4
4. Desarrollo 4
4.1 Introducción 4
4.2 Diseño Físico del Robot XC-3 4
4.2.1 Estructura 5
4.2.2 Controlador de los Motores 5
4.2.3 Sensores 5
4.2.4 Acondicionadores de señal 6
4.2.5 Sensores de ultrasonido 6
4.2.5.1 Transmisor 7
4.2.5.2 Receptor 7
4.2.6 Regulador 8
4.2.7 Baterías 8
4.2.8 Tarjeta de desarrollo ESPARTAN -3 9
4.3Hardware Virtual 9
4.3.1 Modulo 1 GENECOD 10
4.3.2 Modulo 2 PRINCI 10
4.3.3 Modulo 3 CODIF 10
4.3.4 Modulo 4 ENTRADA 10
4.3.5 Modulo 5 MULTICODI 10
4.3.6 Modulo 6 MULTISALIDA 11
4.3.7 Modulo 7 AG 11
4.3.8 Modulo 8 RETIENE 11
4.3.9 Modulo 9 FIJO 11
4.3.10 Modulo 10 y 11 PWM 11
4.3.11 Modulo 12 MENSAJE 11
5. Conclusiones, Recomendaciones 11
5.1 Conclusiones 11
5.2 Recomendaciones 11
6. Referencias Bibliográficas 12
Fernández Rubio Abraham, Código: 301217259, bossx5@hotmail.com 1
Proyecto de Diseño con Electrónica Integrada. Robot Móvil con FPGA
1. RESUMEN
La robótica y la inteligencia artificial tienen un crecimiento muy grande, estas dos disciplinas se funden para complementarse y generar
aplicaciones útiles en la vida cotidiana. Éste proyecto describe un sistema Inteligente para la navegación del robot móvil XC-3, el sistema
está basado en el desarrollo de un algoritmo evolutivo, que se compone de un chip ADN emulado electrónicamente, un generador de
individuos o soluciones[1], un algoritmo de control, un algoritmo de aprendizaje y de otros algoritmos que interactúan con estos
componentes. Se utilizan algunos circuitos integrados para dar al robot sensibilidad de su entorno. Todo se implementa en un hardware
de última tecnología como lo es un FPGA, este proyecto utiliza la tarjeta de desarrollo SPARTAN 3 [4] que tiene un FPGA Xc3s200, el
cual equivale a 200000 compuertas lógicas programables.
2. SÍNTESIS Y CONSECUENCIAS
El propósito de este proyecto es integrar algunos instintos primitivos a un robot móvil. De ésta manera se intenta contemplar la difusa
frontera entre el mundo real y el artificial, todo esto se enfoca en el área de la electrónica digital y la computación. Principalmente el
desarrollo de tecnologías de sistemas embebidos ofrece ir mas allá con los FPGA’s y aplicar algoritmos que requieren una velocidad de
procesamiento y ejecución de algoritmos en forma paralela. Se implementa en un robot móvil diferencial debido a su simplicidad, ya que
por el momento el comportamiento del dispositivo es lo que importa, no tanto el diseño del hardware. Posterior a este desarrollo es
posible dar un paso adelante y añadir más características que hagan del robot una entidad mas acercada a la realidad; de esta manera
llegar a la nano-robótica y atender algunas enfermedades o quizás el monitoreo de algún proceso, entre muchas otras aplicaciones.
3. ANTECEDENTES
En medicina, los chips de ADN permiten estudiar la expresión, en paralelo, de miles de genes. En electrónica, estos dispositivos se
pueden emular para almacenar y evaluar bases de reglas explotando el paralelismo de los circuitos configurables.
En los últimos años se ha incrementado el interés por los chips de ADN como herramienta para el diagnóstico de enfermedades [6]. La
principal ventaja de esta tecnología es que permite estudiar la expresión de miles de genes en un solo ensayo debido al paralelismo de
la hibridación del ADN. Los chips ADN se han propuesto como plataforma para almacenar y evaluar bases de reglas [3]. La principal
ventaja es el paralelismo de la hibridación del ADN, lo cual permite que miles de reglas se evalúen simultáneamente para reducir el
tiempo de procesamiento. Es importante recordar que el número de reglas NR depende del número de conjuntos N y del número de
variables n; la relación se describe mediante la ecuación (1).
NR = N n (1)
Para un número de conjuntos N fijo las reglas crecen exponencialmente con el número de variables n. Por ejemplo, una base de reglas
Booleanas, N = 2 {0, 1}, con n = 2 entradas contiene 4 reglas. Una base de reglas difusa con N = 5 conjuntos difusos y n = 2 entradas
contiene 25 reglas. En robótica [2] se emula la operación de los chips de ADN para tareas como integración sensorial y evaluación de
reglas explotando el paralelismo de los circuitos configurables como los arreglos programables análogos (FPAAs) y digitales (FPGAs).
3.1 Chip ADN Electrónico
La celda básica de un chip ADN en electrónica digital se muestra en la figura
1. La celda tiene dos registros, el primero corresponde al dato externo (target)
y el segundo al dato almacenado (probe), la distancia entre los dos datos se
calcula mediante la operación XOR. Cuando el dato de entrada y el dato
almacenado son complementarios la bandera del registro resultado es uno, en
otro caso es cero.
Figura 1. Celda de Chip ADN Electrónico.
3.2 Reglas en Circuitos Configurables
La figura 2 corresponde a una regla usando dos celdas básicas, una por entrada. Las banderas individuales se combinan para obtener la
bandera de la regla. Cuando las lecturas de los sensores (x1, x2) están presentes, los antecedentes de la regla se evalúan en paralelo y
el resultado de la operación se manifiesta en la bandera de la regla rule flag, uno lógico significa regla activa. El número de reglas y
entradas está limitado por la capacidad del circuito configurable, note que el procesamiento de la base de reglas es paralelo, figura 3.
Fernández Rubio Abraham, Código: 301217259, bossx5@hotmail.com 2
Proyecto de Diseño con Electrónica Integrada. Robot Móvil con FPGA
Figura 2. Se combinan dos celdas para forma una regla
F
igura 3. Base de reglas para dos entradas {x1, x2}. Las
banderas de las cuatro reglas permiten seleccionar las
salidas.
3.3 Mapa Entrada / Salida (E/S)
Una vez se tiene el vector que indica las reglas activas este se debe transformar en las salidas del sistema. Para continuar con el
paralelismo es preciso diseñar en el mismo circuito bloques adicionales para el mapa.
El vector de banderas se utiliza para direccionar un bloque de registros (rule actions) hacia las salidas (y1, y2). Las banderas de la base
de reglas se utilizan como dirección para enviar los registros rule actions a las salidas. El contenido de los registros de la base de reglas
así como los registros de salida se pueden ajustar en línea para aprender el mapa E/S: (x1, x2) & (y1, y2). Si tenemos un robot móvil las
entradas son los sensores y las salidas los motores, el controlador se ajustan en operación para satisfacer una función de desempeño J.
4. DESARROLLO
4.1 Introducción
Para visualizar la esencia del sistema la figura 4 presenta una analogía entre la genética y la electrónica digital con el propósito de
diseñar un algoritmo total compuesto de sub-algoritmos, de tal forma que se complemente la biología y la electrónica para que el XC-3
sea un solo ser viviente digital.
Figura 4. Analogía Genética y Electrónica Digital
Fernández Rubio Abraham, Código: 301217259, bossx5@hotmail.com 3
Proyecto de Diseño con Electrónica Integrada. Robot Móvil con FPGA
Es de aclarar que cada algoritmo es una descripción hardware en VHDL y que al final es implementado en un FPGA. El robot XC-3
posee algo que se ha llamado instinto electrónico y que no le permite al XC-3 realizar acciones que le hagan daño, No se puede
olvidar que los humanos también poseen instinto. También el robot XC-3 es capaz de desechar soluciones que haya aprendido y guardar
una nueva, esto depende de la cantidad de generaciones que se le deje para que aprenda, estas generaciones pueden ser desde 1
hasta millones. No sobra decir que con los dispositivos como lo son los FPGA cada estudiante es libre de darle inteligencia a su robot, no
es obligación seguir parámetros al pie de la letra, lo único que tienen que tener es imaginación y saber de descripción de hardware para
que lo que piensan sea lo que llegue al FPGA.
4.2 Diseño Físico del Robot XC-3
4.2.1 Estructura
El cuerpo del XC-3 se ha hecho de acrílico color negro de 0.003m de
grosor, el acrílico es un material muy resistente que permite
acondicionar muchos dispositivos al cuerpo del robot sin ningún
problema. Todos los elementos en el robot XC-3 son atornillables. En
la figura 5 se observan las diferentes partes del XC-3.
Figura 5. Plantillas de la estructura del XC-3
La tracción del XC-3 esta compuesta por: 2 servomotores
marca FUTABA S003 debidamente modificados para que
giren 360 grados. Los pines de control van conectados al
FPGA. 2 llantas de goma usadas en aeromodelismo de 0.05m
de diámetro 1 rueda loca de pasta con un soporte que se usa
en aeromodelismo. Ver figura 6.
Figura 6. Partes del XC-3
4.2.2 Controlador de los Motores
El L293D se encarga del manejo de los motores de CD y puede manejar hasta 1 Ampere de corriente con voltajes de operación desde
4.5 hasta 36 Volts de manera bidireccional, pero en este caso se utiliza para que los motores giren en un solo sentido, ver Fig. 7 (c). Las
señales SI y /SD (/SI y SD) conectadas al arreglo NOR (se requiere una OR) correspondientes producen la señal de salida que debe
alimentar a la entrada IN1 (IN2) del L293D. Las señales de salida del L293D deben estar invertidas. Para lograr la inversión de las
señales se conectan los motores a voltaje para activarse cuando sea cero volts.
a)
b)
c)
Figura 7. A) Puente H L293D, b) NOR 74LS32, c) Controlador
Fernández Rubio Abraham, Código: 301217259, bossx5@hotmail.com 4
Proyecto de Diseño con Electrónica Integrada. Robot Móvil con FPGA
Para controlar la velocidad y el sentido de giro de las ruedas se utilizan aparte de dos circuitos tipo H
con mosfets y dos señales PWM que provienen del circuito UDN2916B de 5KHz para lograr la
máxima eficiencia. El circuito permite que los motores giren en ambos sentidos con velocidad
variable y tienen freno electrónico. A continuación se presenta el diagrama esquemático del modulo
de PWM.
4.2.3 Sensores
El XC-3 está equipado con 8 sensores infrarrojos de los cuales se usan 4, se usan los cuatro del
frente. Ya que se utilizan solo cuatro, todo el algoritmo evolutivo gira entorno a las 16 posibilidades
de entrada que puede tener el XC-3. Cada sensor esta compuesto por un diodo emisor y un diodo
receptor de infrarrojos. En la figura 10 se puede ver como están dispuestos estos sensores.
Figura 8. Modulo PWM
Figura 9. Par Óptico CNY70
Figura 10. Posición de Sensores, FPGA Sparta3, Regulador 7805
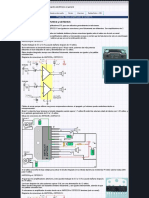
4.2.4 Acondicionadores de señal
El LM339 se utiliza como comparador; los amplificadores operacionales (AO) U1a y U1b, ver Fig. 11(b), conectados a los fotodiodos IR
permiten discriminar los niveles de la luz IR emitida por LED's de luz IR D1, D2 y D3 que es captada por los fotodiodos D4, D5 y D6
respectivamente, ver Fig. 11(a). La señales producidas por U1a y U1b (SI y SD) son invertidas por los transistores Q1 y Q2 para producir
las señales de control (/SI y /SD).
Figura 11. a) Etapa de detección de luz IR reflejada b) Detector de niveles e inversión
Fernández Rubio Abraham, Código: 301217259, bossx5@hotmail.com 5
Proyecto de Diseño con Electrónica Integrada. Robot Móvil con FPGA
4.2.5 Sensores de ultrasonido UCM-R4OK1
Son utilizados para medir la distancia a la que se encuentra el vehículo de la pared para lograr mantener un margen de espacio
adecuado que ayude en la navegación del sistema y evite que el mismo se acerque demasiado al borde de la ruta y caiga por ella.
Además colabora en la identificación de la existencia de pared con el fin de poder distinguir entre las rutas de avance de la pirámide que
se encuentran a los lados, y las secciones de curva que están constituidas por las esquinas de la misma.
Figura 12. a) Sensores Ultrasónicos.
b) Funcionamiento de los sensores de ultrasonido
El funcionamiento de dicho sistema es mostrado en la figura 12, consistente en un circuito de generación de onda seno con frecuencia
de 40 Khz. Durante un tiempo aproximado de 300msg, una vez se ha iniciado la generación de estos pulsos el sistema de control
arranca un contador que sólo se detendrá cuando el sensor detecte el arribo del eco de la onda generada, con el fin obtener una noción
de la distancia a la que se encuentra el obstáculo más cercano.
4.2.5.1 Transmisor
El transmisor esta construido con un 555 (ver figura 13) e inversores CMOS (Figura 14), se emplea la característica CMOS para
ponerlos en paralelo y aumentar la potencia de transmisión. La señal acoplada entre las terminales positiva y negativa es desfasada
180º, por lo que el voltaje aplicado entre las terminales es el doble. El transmisor completo se muestra en la figura 15.
Fernández Rubio Abraham, Código: 301217259, bossx5@hotmail.com 6
Proyecto de Diseño con Electrónica Integrada. Robot Móvil con FPGA
4.2.5.2 Receptor
El receptor se compone de dos circuitos: amplificador de señal y circuito de detección. La señal es recibida por el sensor receptor y
amplificada 1000 veces (60dB) en dos pasos un amplificador por 100 (40dB) y un amplificador por 10 (20dB) mediante el uso de
amplificadores operacionales TL084 con entradas JFET (figura 17).
El detector de señal consiste de un rectificador medio puente y un comparador. El voltaje de comparación esta establecido en 0.045Vcc.
La siguiente figura muestra el diagrama esquemático y su respuesta.
Figura 18. Detector de Señal
4.2.6 Regulador
El XC-3 posee un regulador L7805 que garantiza un voltaje de 5 volts DC para los
diferentes dispositivos del robot. En la figura 19 se observan el regulador y su
diagrama esquemático.
Figura 19. a) Regulador 7805
b) Diagrama interno 7805
Fernández Rubio Abraham, Código: 301217259, bossx5@hotmail.com 7
Proyecto de Diseño con Electrónica Integrada. Robot Móvil con FPGA
4.2.7 Baterías
El XC-3 tiene incorporado 6 pilas recargables para un total de 7.2 voltios. El diseño utiliza estas pilas doble AA debido a que los
servomotores no consumen mucha corriente. En la figura 6 se puede observar la posición de las pilas. Están situadas en la parte inferior
del primer piso, las pilas están conectadas al regulador de voltaje.
4.2.8 Tarjeta de desarrollo ESPARTAN -3
La tarjeta de desarrollo SPARTAN-3 esta situada en el segundo piso del XC-3 y la parte más importante del hardware físico del robot. Se
dice que es hardware físico por que a los codificadores, multiplexores y otros dispositivos que se crearon con el FPGA se les llama
hardware virtual. Nótese que la gran cantidad de dispositivos electrónicos se encuentran implementados en la tarjeta, es la razón de que
no existan muchos de I.C.’s en el chasis del robot. En la figura 20 se puede observar la ubicación de la SPARTAN-3. A continuación se
muestra la SPARTAN-3 y sus características principales.
• ISP PROM XCF02S ó XCF04S
• Memoria RAM estática: 2Mbytes
• Memoria FLASH: 4 Mbytes
• Temperatura de almacenamiento: entre –20ºC y 80ºC.
• Temperatura de funcionamiento: entre 0ºC y 60ºC.
• Tamaño del módulo: 90x112mm
• Interface RS232
• Alimentación: 5V
• Consumo: 450 mA
• Conector de expansión de 200 pines
• Conector JTAG
a)
b)
Figura 20. SPARTAN 3 a) Vista superior. b) Diagrama esquemático.
4.3 Hardware Virtual
Cada modulo tiene su tarea especifica y que así funcionen todo el tiempo, eso no quiere decir que hagan parte del sistema todo el
tiempo. Para eso el XC-3 cuenta con dos multiplexores MULTICODI Y MULTISALIDA que son los encargados de dejar actuar los
módulos necesarios en cada parte del proceso. El XC-3 esta compuesto por 12 módulos y cada modulo contiene una descripción de
hardware, algunos módulos son independientes y otros dependientes. En la figura 21 se puede observar el esquemático del XC-3, este
esquemático esta enumerado, el orden de los números no tiene nada que ver con la jerarquía de cada modulo.
Fernández Rubio Abraham, Código: 301217259, bossx5@hotmail.com 8
Proyecto de Diseño con Electrónica Integrada. Robot Móvil con FPGA
Figura 21. Diagrama esquemático XC-3 Hardware Virtual
4.3.1 Modulo 1 GENECOD
Este modulo maneja una matriz dinámica de 16 x 16 palabras y cada palabra esta compuesta por 4 bits, este modulo entrega las 16
posibles combinaciones al chip ADN emulado electrónicamente; esto garantiza que en cada ciclo de maquina el .chip ADN emulado
electrónicamente va a encontrar una hibridación en un lugar distinto.
4.3.2 Modulo 2 PRINCI
Este modulo se encarga de guiar al XC-3 hacia delante siempre y cuando los sensores no registren ningún obstáculo. También cumple la
función de gobernar a MULTICODI. Ya que cuando hay obstáculos deja actuar a ENTRADA para así poder dar una solución al problema.
4.3.3 Modulo 3 CODIF
Este modulo codifica la salida de ENTRADA o de PRINCI en acciones, estas acciones son las que el XC-3 identifica para tomar las
decisiones que posee. Las decisiones que puede tomar el XC-3 son: Adelante, atrás, izquierda, derecha, rotar a la izquierda, rotar a la
derecha, girar a la izquierda, girar a la derecha y quietud.
4.3.4 Modulo 4 ENTRADA
Este es uno de los módulos mas importantes del XC-3 aquí es donde se encuentra el chip ADN emulado electrónicamente. Este modulo
se encarga de registrar los sensores, los sensores entran al XC-3 como un vector de 4 bits. Luego se carga el chip con las
combinaciones que ha generado GENECOD que son 16 vectores cada uno de 4 bits. Posteriormente se busca el complemento del
vector de entrada y se registra esa hibridación. A esa hibridación se le asigna un lugar dentro de un vector de 16 bits y ese vector se
codifica para ser convertido en un vector de 4 bits, este vector de 4 bits es el que entra al modulo a MULTICODI. EL modulo ENTRADA
es el que le garantiza al XC-3 dar diferentes soluciones a una misma entrada. Es aquí donde esta la gran diferencia con los robots que
no aprenden ya que estos robots son capaces de dar solo una solución a una entrada. El FPGA es capaz de realizar diferentes procesos
al mismo tiempo (paralelismo) algo imposible para un MICROCONTROLDAOR.
4.3.5 Modulo 5 MULTICODI
Este modulo es un multiplexor encargado de dejar pasar el dato que va a codificar el modulo CODIF, este modulo lo gobierna PRINCI y
maneja datos de ENTRADA y PRINCI.
Fernández Rubio Abraham, Código: 301217259, bossx5@hotmail.com 9
Proyecto de Diseño con Electrónica Integrada. Robot Móvil con FPGA
4.3.6 Modulo 6 MULTISALIDA
Este modulo es un multiplexor encargado dejar pasar las acciones que ha generado el modulo CODIF o el modulo FIJO. Es gobernado
por el modulo AG.
4.3.7 Modulo 7 AG
Este es el modulo mas importante del XC-3. Es el encargado de pasar las acciones que genera el ENTRADA por el instinto
electrónico. De esta forma se garantiza que el XC-3 no va a tomar decisiones que le hagan daño. Este modulo también se encarga de
controlar a MULTISALIDA, FIJO Y MENSAJE. En conclusión es el modulo encargado de decidir si el XC- 3 ya aprendió o no ha
aprendido. La mayoría de los algoritmos genéticos premian una acción buena. Sin embargo este algoritmo no premia al XC-3
simplemente tiene prohibidas unas acciones pero tiene la libertad de escoger las otras acciones que el crea conveniente. Este modulo
también se encarga de guardar las acciones correctas de acuerdo al numero de generaciones que tenga cargado el XC-3, es por eso
que el XC-3 es capaz de aprender en 20 segundos o en 20 minutos. También es función de AG hacer que el XC-3 aprenda por cada
situación que se le presenta. Esto quiere decir que si en el entorno donde se encuentra solo se encuentra con 4 posibilidades de las 16
que es capaz de reconocer, el aprende esas 4 y no le afecta no haber aprendido las otras 12 posibilidades. En la segunda fase el XC-3
tendrá que aprender y además se usara para inteligencia militar.
4.3.8 Modulo 8 RETIENE
Este modulo se encarga de retener las decisiones que escoge el XC-3 cierta cantidad de tiempo. Esto con el fin de que las acciones del
XC-3 sean notables, y lo dejen moverse con más libertad en su entorno.
4.3.9 Modulo 9 FIJO
Este es el modulo en el que se depositan las acciones buenas guardadas por el AG luego de haber aprendido, AG permite que el vector
de entrada entre a FIJO y FIJO le da la solución adecuada a esa entrada. Esa solución es la acción que entra a MULTISALIDA, además
Es donde termina todo el trabajo realizado por los módulos anteriores.
4.3.10 Modulo 10 y 11 PWM
Son los módulos encargados de enviar las señales a los servomotores. Realizan su trabajo de acuerdo a los datos que les llega desde
RETIENE. Cada uno posee dos bits que los controlan. Un bit es para activarlos o desactivarlos y el otro bit es el sentido de giro.
4.3.11 Modulo 12 MENSAJE
Es el modulo encargado de visualizar el mensaje LEARNED que se despliega cuando el XC-3 ha aprendido totalmente o
individualmente. Es controlado por AG.
5. CONCLUSIONES, RECOMENDACIONES
5.1 Conclusiones
Los FPGA son dispositivos que implementan prácticamente cualquier cosa que se modele en términos lógicos. Existen limitaciones como
con los Microcontroladores, los cuales solo pueden atender a un proceso a la vez. La lógica digital vuelve a tomar fuerza con los FPGAS.
Se cuenta con una gran cantidad de dispositivos en un solo encapsulado, sin preocuparse por grandes espacios como hace unos años.
Además estos dispositivos pueden ser combinacionales, secuenciales o una combinación de ambos.
El chip ADN emulado electrónicamente es una herramienta muy poderosa para desarrollar algoritmos inteligentes. Gracias a el se
generar un estimulo diferente a una misma entrada digital. El aspecto más importante de este proyecto es el hecho de dotar a un robot
con algunos instintos que simulan cierta inteligencia artificial primitiva; de tal firma que el XC-3 aprende a navegar en un entorno cerrado
sin elegir acciones incorrectas después de haber aprendido. Esto es una muestra de que es posible implementar algoritmos evolutivos
con la tecnología actual; sí esto es hoy, que será del mañana cuando las capacidades de los sistemas embebidos sobrepasen por
mucho a los actuales. Es cuestión de la imaginación establecer los próximos límites entre la verdad y la ficción.
5.2 Recomendaciones
El uso de electrónica integrada simplifica significativamente el proceso de elaboración del robot. Aunque actualmente las tendencias en
cuanto a tecnología son digitales, es difícil modelar el mundo de esta manera; por tanto, es imprescindible utilizar elementos analógicos y
combinarlos con sistemas digitales para aprovechar la características de ambos lados de la electrónica. Es entonces deseable que el
lector esté en contacto constante con las nuevas tendencias digitales como lo es el lenguaje de descripción VHDL y su hardware de
aplicación.
Fernández Rubio Abraham, Código: 301217259, bossx5@hotmail.com 10
Proyecto de Diseño con Electrónica Integrada. Robot Móvil con FPGA
6. REFERENCIAS BIBLIOGRÁFICAS
[1] Delgado, A: .Rule base evaluation using DNA chips. Proceedings American Control Conference, pp. 3242. 3245, Anchorage.
Alaska, Mayo 8/10/2002
[2] Delgado, A.: Robot Controller Using Electronic DNA Chip, Memorias Congreso Internacional de Ingeniería Eléctrica y
Electrónica, Bogotá, Marzo, 2003.
[3] Delgado, A.: DNA Chips as Lookup Tables for Rule Based Systems, IEE Computing and Control Journal, 13, 113-119, 2002.
Disponible en el sitio Web:
www.iee.org/OnComms/pn/materials/libra ry.cfm, último acceso Septiembre 2003.
[4] Spartan 3 Starter Kit Board User Guide. www.xilinx.com
[5]. Phimister, B. (Ed.): Nature Genetics Supplement, Vol. 21, No.1, 1999.
Fernández Rubio Abraham, Código: 301217259, bossx5@hotmail.com 11
Proyecto de Diseño con Electrónica Integrada. Robot Móvil con FPGA
Potrebbero piacerti anche
- Rectificador de PresicionDocumento23 pagineRectificador de Presicionpruebapueba123Nessuna valutazione finora
- Seleccion Del Amplificador Operacional para Circuitos de FiltradoDocumento6 pagineSeleccion Del Amplificador Operacional para Circuitos de FiltradoJos1Nessuna valutazione finora
- Amplificador Clase DDocumento9 pagineAmplificador Clase Desteban_48Nessuna valutazione finora
- Informe Final DarlingtonDocumento4 pagineInforme Final DarlingtonCarlosVillavicencioGNessuna valutazione finora
- 89Documento90 pagine89arkkanoidNessuna valutazione finora
- Laboratorio 3 Punto de Trabajo y Corrección Del OffsetDocumento2 pagineLaboratorio 3 Punto de Trabajo y Corrección Del OffsetBryan Marin MartinezNessuna valutazione finora
- Informe Final N09Documento17 pagineInforme Final N09CarlosNessuna valutazione finora
- TP07 17Documento2 pagineTP07 17Cesar HugoNessuna valutazione finora
- Amplificador en Baja Frecuencia Circuitos Electronicos Informe FinalºDocumento8 pagineAmplificador en Baja Frecuencia Circuitos Electronicos Informe FinalºPedro Daniel Lopez PanioraNessuna valutazione finora
- Manual Analizador de Espectro Agilent r3131Documento78 pagineManual Analizador de Espectro Agilent r3131UlisesCnf100% (1)
- Reporte - Práctica 2Documento16 pagineReporte - Práctica 2Jairo Reynoso AlbaNessuna valutazione finora
- Practica 4Documento8 paginePractica 4Porta Perez Garcia100% (1)
- Panasonic CT-G2995 GN3. Sin EncendidoDocumento20 paginePanasonic CT-G2995 GN3. Sin EncendidoJuan Carlos GarcíaNessuna valutazione finora
- Amplificador 50W PDFDocumento2 pagineAmplificador 50W PDFpablo190381100% (1)
- Experimento 29Documento3 pagineExperimento 29samuelNessuna valutazione finora
- Hector Acuña - Trabajo de Investigacion - Bachiller - 2019Documento41 pagineHector Acuña - Trabajo de Investigacion - Bachiller - 2019Martin RodriguezNessuna valutazione finora
- 02-Res CONET 386 81 ElectronicaDocumento24 pagine02-Res CONET 386 81 ElectronicaPablo ClavellinoNessuna valutazione finora
- Amplificador 25w N 059Documento7 pagineAmplificador 25w N 059Pablo Diego Cecere CasadoNessuna valutazione finora
- 100000i21n-Guia N°2-Labelege01-Realimentación NegativaDocumento4 pagine100000i21n-Guia N°2-Labelege01-Realimentación NegativaJoséPérezCamposNessuna valutazione finora
- Electricidad ElectronicaDocumento11 pagineElectricidad ElectronicaAlvaro Santos0% (2)
- Mini DiscDocumento31 pagineMini DiscEsdras Nehemias Monroy LaraNessuna valutazione finora
- In For Me Practica 1Documento14 pagineIn For Me Practica 1Juan Carlos Pabon VelascoNessuna valutazione finora
- Crear Un Amplificador de Guitarra de Tubo de Vacío DIY Mini Fender Princeton 5F2-ADocumento7 pagineCrear Un Amplificador de Guitarra de Tubo de Vacío DIY Mini Fender Princeton 5F2-AwalterdadaNessuna valutazione finora
- Inces Electrónica Básica1Documento38 pagineInces Electrónica Básica1Yeferson Rodriguez100% (1)
- Informe de Electronica AnalogicaII No.2Documento22 pagineInforme de Electronica AnalogicaII No.2victor adrianNessuna valutazione finora
- Amplificador de Audio 10 W Con Tda2003Documento6 pagineAmplificador de Audio 10 W Con Tda2003Hugo Roberto RibeiroNessuna valutazione finora
- Conexiones de AmplificadorDocumento6 pagineConexiones de AmplificadorCristo Gil MontesdeocaNessuna valutazione finora
- Informe Acondicionamiento de Una SeñalDocumento4 pagineInforme Acondicionamiento de Una SeñaljonatanrojazNessuna valutazione finora
- Amplificadores de Audio An7522n - An7523n - cd7522cs y cd7523cs Utilizados en TelevisoresDocumento2 pagineAmplificadores de Audio An7522n - An7523n - cd7522cs y cd7523cs Utilizados en Televisorescidcajas873100% (1)
- Tema 0 Introducción PDFDocumento13 pagineTema 0 Introducción PDFGuido Santillan AriasNessuna valutazione finora