Potrebbero piacerti anche
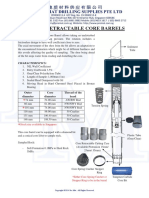
- 05 Mazier Retractable Core BarrelsDocumento1 pagina05 Mazier Retractable Core BarrelsJuan100% (1)
- PDA Methodology Kohelia BridgeDocumento10 paginePDA Methodology Kohelia Bridgembp planningNessuna valutazione finora
- ISRM Suggested Methods For Land Geophysics in Rock EngineeringDocumento30 pagineISRM Suggested Methods For Land Geophysics in Rock EngineeringLeonardo Octavio Olarte SánchezNessuna valutazione finora
- Cambridge 73mm High Pressure Dilatometer - Working InstructionsDocumento113 pagineCambridge 73mm High Pressure Dilatometer - Working InstructionsAnonymous Re62LKaACNessuna valutazione finora
- Cross HoleDocumento6 pagineCross HoleSheane GutomanNessuna valutazione finora
- International Society for Rock Mechanics: List of Members 1980Da EverandInternational Society for Rock Mechanics: List of Members 1980Valutazione: 3.5 su 5 stelle3.5/5 (2)
- Bas en Iso 22282-3 - 2013 PDFDocumento2 pagineBas en Iso 22282-3 - 2013 PDFmile0% (1)
- Interpretation of Pressuremeter Tests in Rock: Conference PaperDocumento13 pagineInterpretation of Pressuremeter Tests in Rock: Conference PaperPraveen RanaNessuna valutazione finora
- Slurry W Alls: Design, Construction, and Quality Contro/: Ichard - SoDocumento4 pagineSlurry W Alls: Design, Construction, and Quality Contro/: Ichard - SoAyman SobhyNessuna valutazione finora
- 4.seismic-Wave-Based Testing in GeotechnicalDocumento25 pagine4.seismic-Wave-Based Testing in GeotechnicalBukhari RamliNessuna valutazione finora
- Ground Freezing 1980: Selected Papers from the Second International Symposium on Ground Freezing, Trondheim, Norway, 24-26 June 1980Da EverandGround Freezing 1980: Selected Papers from the Second International Symposium on Ground Freezing, Trondheim, Norway, 24-26 June 1980Nessuna valutazione finora
- Determining Transmissivity and Storativity of Low Permeability RocksDocumento8 pagineDetermining Transmissivity and Storativity of Low Permeability RocksJose Luis Nava HernandezNessuna valutazione finora
- Final MASW Report For Mumbai Metro Line 3 Rev 0Documento24 pagineFinal MASW Report For Mumbai Metro Line 3 Rev 0Mukund Chaudhari100% (1)
- Geotechnical Investigation of Upper Keng Tawng DamDocumento6 pagineGeotechnical Investigation of Upper Keng Tawng DamEditor IJTSRDNessuna valutazione finora
- Pull Out TestDocumento20 paginePull Out TestTareq Al ShyoukhyNessuna valutazione finora
- Triaxial Testing of Granular Soil (Colliat-Dangus, 1988)Documento21 pagineTriaxial Testing of Granular Soil (Colliat-Dangus, 1988)Abraham FIgueroa ARevaloNessuna valutazione finora
- D5080.Rapid Determination of Percent CompactionDocumento9 pagineD5080.Rapid Determination of Percent CompactionleocivilNessuna valutazione finora
- Design of Piles Under Cyclic Loading: SOLCYP RecommendationsDa EverandDesign of Piles Under Cyclic Loading: SOLCYP RecommendationsAlain PuechNessuna valutazione finora
- Pullout Cohesion SoilDocumento112 paginePullout Cohesion Soilyusuf alhowaidiNessuna valutazione finora
- Geotechnical Testing EquipmentDocumento59 pagineGeotechnical Testing EquipmentAlex CristobalNessuna valutazione finora
- Ssi Report 54-0Documento16 pagineSsi Report 54-0Shubham MauryaNessuna valutazione finora
- Pinhole Erosion Test For Identification of Dispersive ClaysDocumento28 paginePinhole Erosion Test For Identification of Dispersive ClaysAndyra Jaiz Baddu100% (1)
- Evaluation of Grouting For Hydraulic Barriers in RockDocumento13 pagineEvaluation of Grouting For Hydraulic Barriers in RockshenNessuna valutazione finora
- Vibroreplacement PDFDocumento9 pagineVibroreplacement PDFthadikkaranNessuna valutazione finora
- Rock-Engineering Tutorials Solutions BBDDocumento7 pagineRock-Engineering Tutorials Solutions BBDSandip PaudelNessuna valutazione finora
- AASHTO Plate Load PDFDocumento5 pagineAASHTO Plate Load PDFAegrineNessuna valutazione finora
- 7 John Burland Paradox of The Gaussian Subsidence TroughDocumento40 pagine7 John Burland Paradox of The Gaussian Subsidence TroughHumza MubarikNessuna valutazione finora
- Soil Mechanics Correlations PDFDocumento52 pagineSoil Mechanics Correlations PDFMayoo LaxmanNessuna valutazione finora
- Geotechnical investigation The Ultimate Step-By-Step GuideDa EverandGeotechnical investigation The Ultimate Step-By-Step GuideNessuna valutazione finora
- ResumeDocumento3 pagineResumeS MUTHYALAIAHNessuna valutazione finora
- Foundations On Soft Soils For Khulna MedicalDocumento6 pagineFoundations On Soft Soils For Khulna MedicalJahid Jahidul Islam KhanNessuna valutazione finora
- Determination of Degree of Saturation of Soil Samples by B Value MeasurementDocumento5 pagineDetermination of Degree of Saturation of Soil Samples by B Value Measurementcamillelele100% (1)
- Pressuremeter Testing: Methods and InterpretationDa EverandPressuremeter Testing: Methods and InterpretationValutazione: 5 su 5 stelle5/5 (2)
- Thesis Fulltext PDFDocumento184 pagineThesis Fulltext PDFAlfredo Dex Quispe MarrónNessuna valutazione finora
- Shear Strength Reduction at Soil Structure InterfaceDocumento10 pagineShear Strength Reduction at Soil Structure InterfaceKasim BaručijaNessuna valutazione finora
- Geomil CPT and SeismicDocumento6 pagineGeomil CPT and SeismicChowdhury PriodeepNessuna valutazione finora
- Reappraisal of The Autoclave Expansion TestDocumento26 pagineReappraisal of The Autoclave Expansion TestCristián JiménezNessuna valutazione finora
- VibrofloatationDocumento6 pagineVibrofloatationSelvemNessuna valutazione finora
- IS - Free Swell IndexDocumento2 pagineIS - Free Swell IndexDr Wong Kim YuenNessuna valutazione finora
- Document Center, Inc. - Your Online Library of US and International StandardsDocumento16 pagineDocument Center, Inc. - Your Online Library of US and International Standardsbiles1234Nessuna valutazione finora
- GeoMos 2010 SchweigerDocumento13 pagineGeoMos 2010 SchweigerIancu-Bogdan TeodoruNessuna valutazione finora
- Ground - Improvement - and - Ground - Control - in FUll PDFDocumento226 pagineGround - Improvement - and - Ground - Control - in FUll PDFDipendra AwasthiNessuna valutazione finora
- Some Physical Properties of Sands and GravelsDocumento12 pagineSome Physical Properties of Sands and GravelsFernando Alvarado BlohmNessuna valutazione finora
- Downhole Seismic Testing: Standard Test Methods ForDocumento10 pagineDownhole Seismic Testing: Standard Test Methods ForJesús Luis Arce GuillermoNessuna valutazione finora
- Forensic Geotechnical Engineering Studies of Detection and Mitigation ofDocumento9 pagineForensic Geotechnical Engineering Studies of Detection and Mitigation ofDiya ChaudharyNessuna valutazione finora
- Slope Inclinometers/indicatorsDocumento11 pagineSlope Inclinometers/indicatorssenthilkumarNessuna valutazione finora
- 05 Mazier Retractable Core Barrels PDFDocumento1 pagina05 Mazier Retractable Core Barrels PDFCut MutiaNessuna valutazione finora
- 01 HBSN Pullout Test ProgramDocumento59 pagine01 HBSN Pullout Test ProgramsiavashsaeediNessuna valutazione finora
- Test Method For Metallic Fibre Concrete - Measuring The Flexural Tensile Strength (Limit of Proportionality (LOP), Residual)Documento20 pagineTest Method For Metallic Fibre Concrete - Measuring The Flexural Tensile Strength (Limit of Proportionality (LOP), Residual)Oscar Nieto100% (1)
- Benchmarking in Geotechnics-1 Part-IDocumento26 pagineBenchmarking in Geotechnics-1 Part-Ijorge.jimenezNessuna valutazione finora
- Precambrian ResearchDocumento24 paginePrecambrian ResearchMartin NguyenNessuna valutazione finora
- Put Irka 2008Documento60 paginePut Irka 2008MarianaCVSNessuna valutazione finora
- CE6405 Soil Mechanics Solved QB PDFDocumento112 pagineCE6405 Soil Mechanics Solved QB PDFcivildept maamallanNessuna valutazione finora
- 6th Grade Plate Tectonics Lesson PlanDocumento4 pagine6th Grade Plate Tectonics Lesson Planapi-478684695Nessuna valutazione finora
- CH 8 A Trip Through Geological TimeDocumento23 pagineCH 8 A Trip Through Geological Timeapi-286679491Nessuna valutazione finora
- 1.3 Isostasy PDFDocumento10 pagine1.3 Isostasy PDFSipu GiriNessuna valutazione finora
- CPT Photo PageDocumento25 pagineCPT Photo Pagelili2000Nessuna valutazione finora
- 3D Flood Modelling With LIDARDocumento200 pagine3D Flood Modelling With LIDARJavied BhattiNessuna valutazione finora
- Fossil A-Z BookDocumento6 pagineFossil A-Z Bookapi-236358005Nessuna valutazione finora
- Topic 2 - Strength of ConcreteDocumento120 pagineTopic 2 - Strength of ConcreteWayne ChongNessuna valutazione finora
- DRRM MODULE 15 - Potential Volcano-Related HazardsDocumento5 pagineDRRM MODULE 15 - Potential Volcano-Related HazardsYzabella Faye100% (1)
- Great Artists of All TimeDocumento3 pagineGreat Artists of All TimeMuhammad RizwanNessuna valutazione finora
- Nicoll Highway Incident Wong NotesDocumento54 pagineNicoll Highway Incident Wong Notestrường đặngNessuna valutazione finora
- ELS Q1 Module-4 Rocks v2Documento23 pagineELS Q1 Module-4 Rocks v2Dorothy HernandezNessuna valutazione finora
- Crew Petro Introductory ManualDocumento81 pagineCrew Petro Introductory ManualSabrina Chloe ValdesNessuna valutazione finora
- The World and Its People Student's WorkbookDocumento352 pagineThe World and Its People Student's WorkbookTa Bin KaNessuna valutazione finora
- ArcGIS 10.x Geology and MiningDocumento6 pagineArcGIS 10.x Geology and MiningMiguel Angel Zamora SilvaNessuna valutazione finora
- Marine Geodesy-Karl Rinner PDFDocumento50 pagineMarine Geodesy-Karl Rinner PDFFirNessuna valutazione finora
- Chapter 1 - Introduction To Geology PDFDocumento38 pagineChapter 1 - Introduction To Geology PDFZulaikha Kamal50% (4)
- History of Soil MechanicsDocumento9 pagineHistory of Soil Mechanicsleah yadaoNessuna valutazione finora
- Field Report - B.Sc. 5th Sem - 2022Documento29 pagineField Report - B.Sc. 5th Sem - 2022Bikky AhmedNessuna valutazione finora
- Navfac Design Manual DM-2.2 - Structural EngineeringDocumento88 pagineNavfac Design Manual DM-2.2 - Structural EngineeringChachi CNessuna valutazione finora
- Slurry Walls ConstructionDocumento10 pagineSlurry Walls ConstructionRene OrellanaNessuna valutazione finora
- English TaskDocumento3 pagineEnglish Taskendah gunarjatiNessuna valutazione finora
- World Rivers and LakesDocumento4 pagineWorld Rivers and LakesEngr Ghulam MustafaNessuna valutazione finora
- AAPG 2007 Fossen & BaleDocumento16 pagineAAPG 2007 Fossen & BaleziqriiqbalNessuna valutazione finora
- Chapter 15Documento12 pagineChapter 15Aziz Khan Kakar100% (1)
- Glaze ChemistryDocumento9 pagineGlaze ChemistrydtkraeutNessuna valutazione finora
- Avinash Et Al. 2011 Geocarto InternationalDocumento25 pagineAvinash Et Al. 2011 Geocarto InternationalNiranjanAryanNessuna valutazione finora
- Blast Vibration MonitoringDocumento2 pagineBlast Vibration Monitoringorzoweie0% (1)