Potrebbero piacerti anche
- Cheat Sheet (Regular Font) PDFDocumento4 pagineCheat Sheet (Regular Font) PDFJosh ChandyNessuna valutazione finora
- Basic Circuit Theory, Charles A. Desoer, Ernest S. Kuh 1969 PDFDocumento887 pagineBasic Circuit Theory, Charles A. Desoer, Ernest S. Kuh 1969 PDFMithun P S80% (10)
- Bernard Roth (Auth.) - Jadran Lenar - I - Bahram Ravani (Eds.) - Advances in Robot Kinematics and CompuDocumento504 pagineBernard Roth (Auth.) - Jadran Lenar - I - Bahram Ravani (Eds.) - Advances in Robot Kinematics and CompuTinglu Sirnekel NewNessuna valutazione finora
- SVD SlidesDocumento17 pagineSVD SlidesedwarzambranoNessuna valutazione finora
- Complex MatricesDocumento13 pagineComplex Matriceschecheche24Nessuna valutazione finora
- Ch1-3 DiagonalizationDocumento8 pagineCh1-3 DiagonalizationsempiNessuna valutazione finora
- Linalg RefreshDocumento3 pagineLinalg RefreshAdvaitNessuna valutazione finora
- MIT6 436JF08 Rec09Documento9 pagineMIT6 436JF08 Rec09jarod_kyleNessuna valutazione finora
- Chapter 21Documento6 pagineChapter 21manikannanp_ponNessuna valutazione finora
- Algebraic Methods in Combinatorics: 1 Linear Algebra ReviewDocumento5 pagineAlgebraic Methods in Combinatorics: 1 Linear Algebra ReviewPurbayan ChakrabortyNessuna valutazione finora
- SVD NotesDocumento7 pagineSVD Notes禹范Nessuna valutazione finora
- The Exponential MapDocumento5 pagineThe Exponential MapSamuel TomasNessuna valutazione finora
- Problem Set 6: 2 1 2 1 T 2 T T 2 T 3 TDocumento6 pagineProblem Set 6: 2 1 2 1 T 2 T T 2 T 3 TAkshu AshNessuna valutazione finora
- Fundamental Theorem of Curves and Non-Unit Speed CurvesDocumento7 pagineFundamental Theorem of Curves and Non-Unit Speed CurvesJean Pierre RukundoNessuna valutazione finora
- Spectral ReviewDocumento13 pagineSpectral ReviewGerman ChiappeNessuna valutazione finora
- Worksheet4Sols PDFDocumento4 pagineWorksheet4Sols PDFZohaib AfridiNessuna valutazione finora
- 0.1 Review of Axler's AlgorithmDocumento6 pagine0.1 Review of Axler's AlgorithmDickNessuna valutazione finora
- Cheat Sheet (Regular Font, No Margins)Documento2 pagineCheat Sheet (Regular Font, No Margins)Arun ChandranNessuna valutazione finora
- MIT18 S096F13 Lecnote2Documento6 pagineMIT18 S096F13 Lecnote2Yacim GenNessuna valutazione finora
- Notes AnalysisDocumento14 pagineNotes Analysislucabaldassarre368Nessuna valutazione finora
- NDCDZ Cotes21 2Documento7 pagineNDCDZ Cotes21 2orienteNessuna valutazione finora
- STAT 243 Review Exercises December 3, 2010Documento2 pagineSTAT 243 Review Exercises December 3, 2010LucyNessuna valutazione finora
- Lecture 3: Change of Basis and Matrix Representation - . .: I N 1 I N 1 MDocumento5 pagineLecture 3: Change of Basis and Matrix Representation - . .: I N 1 I N 1 MBabiiMuffinkNessuna valutazione finora
- Eigenvalues and EigenvectorsDocumento5 pagineEigenvalues and EigenvectorsMahmoud NaguibNessuna valutazione finora
- Chapter 6 - Vectors and Matrices: 6.1 - IntroductionDocumento5 pagineChapter 6 - Vectors and Matrices: 6.1 - IntroductionLexNessuna valutazione finora
- Density of Diagonalizable Square Matrices: Eigenvector EigenvalueDocumento5 pagineDensity of Diagonalizable Square Matrices: Eigenvector EigenvalueEpic WinNessuna valutazione finora
- Linear Algebra For Deep Learning: Johar M. AshfaqueDocumento7 pagineLinear Algebra For Deep Learning: Johar M. AshfaquezentropiaNessuna valutazione finora
- M235 Lect 10Documento3 pagineM235 Lect 10Clinton BatchankiNessuna valutazione finora
- Exercises Symmetric Matrices 1Documento1 paginaExercises Symmetric Matrices 1Jordan Sta MariaNessuna valutazione finora
- Solutions Linear Algebra.Documento5 pagineSolutions Linear Algebra.marlaNessuna valutazione finora
- Lesson15 9 PDFDocumento5 pagineLesson15 9 PDFconker4Nessuna valutazione finora
- SvdnotesDocumento10 pagineSvdnotesmaroju prashanthNessuna valutazione finora
- NST HutchinsonDocumento13 pagineNST HutchinsonGuillaume TaharNessuna valutazione finora
- 9.07 IsomorphismsDocumento9 pagine9.07 IsomorphismsAxl B. ChanNessuna valutazione finora
- MTH101Documento13 pagineMTH101Deepanshu BansalNessuna valutazione finora
- A Geometric Introduction To Commutative Algebra: This Is Still A Draft VersionDocumento70 pagineA Geometric Introduction To Commutative Algebra: This Is Still A Draft VersionSr-Eko TundeNessuna valutazione finora
- Joseph BreenDocumento9 pagineJoseph BreenArchana MeenaNessuna valutazione finora
- Linear Algebra & Singular Value DecompositionDocumento5 pagineLinear Algebra & Singular Value DecompositionSamir SamirNessuna valutazione finora
- Algebraic Combinatorics - Po-Shen-Loh - MOP 2011Documento5 pagineAlgebraic Combinatorics - Po-Shen-Loh - MOP 2011David DavidNessuna valutazione finora
- MA 106 Linear Algebra (Spring 2016) : Tut Sheet 6: Eigenvalues and EigenvectorsDocumento2 pagineMA 106 Linear Algebra (Spring 2016) : Tut Sheet 6: Eigenvalues and EigenvectorsAshish ManwarNessuna valutazione finora
- Chapter 6Documento8 pagineChapter 6Abhinav SrivastavaNessuna valutazione finora
- PerspectivitiesDocumento7 paginePerspectivitiesShiva KommagoniNessuna valutazione finora
- Linear Algebra Endsem 1Documento20 pagineLinear Algebra Endsem 1Akarsh GuptaNessuna valutazione finora
- Eigenvalues and Eigenvectors: 1 2 N I II I I II IDocumento2 pagineEigenvalues and Eigenvectors: 1 2 N I II I I II IB. AnshumanNessuna valutazione finora
- Semidef MatDocumento4 pagineSemidef MatMuneeb SafiNessuna valutazione finora
- CS 2742 (Logic in Computer Science) : 4 Boolean Functions and CircuitsDocumento5 pagineCS 2742 (Logic in Computer Science) : 4 Boolean Functions and Circuitsgrdprashant974Nessuna valutazione finora
- MIT18 06S10 Exam3 s10 Soln PDFDocumento4 pagineMIT18 06S10 Exam3 s10 Soln PDFahmedNessuna valutazione finora
- cs530 12 Notes PDFDocumento188 paginecs530 12 Notes PDFyohanes sinagaNessuna valutazione finora
- Math 415 - Lecture 9: 1 Inverse of A Matrix (CNTD.)Documento8 pagineMath 415 - Lecture 9: 1 Inverse of A Matrix (CNTD.)박창훈Nessuna valutazione finora
- Chapt6 Upd 1Documento8 pagineChapt6 Upd 1kegici1148Nessuna valutazione finora
- Lecture Notes On SVD For Math 54Documento5 pagineLecture Notes On SVD For Math 54BradNessuna valutazione finora
- Mathematical Treatise On Linear AlgebraDocumento7 pagineMathematical Treatise On Linear AlgebraJonathan MahNessuna valutazione finora
- Math 5390 Chapter 2Documento5 pagineMath 5390 Chapter 2Mauricio AntonioNessuna valutazione finora
- 6 4lectDocumento6 pagine6 4lectdvdiyenNessuna valutazione finora
- Desargues Involution TheoremDocumento6 pagineDesargues Involution TheoremDavis Suarez PajueloNessuna valutazione finora
- Matrix Bhu Class NotesDocumento80 pagineMatrix Bhu Class NotesBipin AttriNessuna valutazione finora
- La2 8Documento5 pagineLa2 8Roy VeseyNessuna valutazione finora
- SpectraltheoremproofDocumento4 pagineSpectraltheoremproofha hueNessuna valutazione finora
- CH 6Documento16 pagineCH 6tareqkh1Nessuna valutazione finora
- Chapter 01. PreliminaryDocumento28 pagineChapter 01. Preliminarykims3515354178Nessuna valutazione finora
- The Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64Da EverandThe Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64Nessuna valutazione finora
- LUSAS Volume 2Documento272 pagineLUSAS Volume 2AshutoshAparaj100% (1)
- TexmathDocumento24 pagineTexmathFandi EdisonNessuna valutazione finora
- Statevariable PDFDocumento50 pagineStatevariable PDFMohana UMNessuna valutazione finora
- StudySchemeEconomics BZUDocumento26 pagineStudySchemeEconomics BZUTipu SultanNessuna valutazione finora
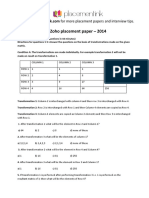
- Zoho Placement Paper - 2014Documento6 pagineZoho Placement Paper - 2014Sathiya NarayananNessuna valutazione finora
- Data Strucure Theory AktuDocumento2 pagineData Strucure Theory AktuSanjay GuptaNessuna valutazione finora
- EE 559 Midterm From S11Documento12 pagineEE 559 Midterm From S11chrisc885597Nessuna valutazione finora
- 4118 Article - Text 18303 2 10 2019122320200409 740 Eatcr2 With Cover Page v2Documento13 pagine4118 Article - Text 18303 2 10 2019122320200409 740 Eatcr2 With Cover Page v2rytelasuncionNessuna valutazione finora
- Class 12 Math Chep - Chap 3 - Matrices, Chapter 4 - DeterminentsDocumento23 pagineClass 12 Math Chep - Chap 3 - Matrices, Chapter 4 - DeterminentsEr Piyush ThaganNessuna valutazione finora
- Leet CodeDocumento134 pagineLeet CodeRoshan SahuNessuna valutazione finora
- Omni TRANSProjectsDocumento44 pagineOmni TRANSProjectsmaryknollerNessuna valutazione finora
- Double Cross Validation For The Number of Factors in Approximate Factor ModelsDocumento34 pagineDouble Cross Validation For The Number of Factors in Approximate Factor Models60 MANIKANDAN LNessuna valutazione finora
- Linear Algebra (CABACANG)Documento41 pagineLinear Algebra (CABACANG)kristineNessuna valutazione finora
- Kalman Bucy 1961Documento14 pagineKalman Bucy 1961kunduru_reddy_3Nessuna valutazione finora
- Kalman Apogee IIDocumento63 pagineKalman Apogee IImhacker100% (1)
- Numerics: Bjarne StroustrupDocumento29 pagineNumerics: Bjarne StroustrupmichaelklachkoNessuna valutazione finora
- Why Are Complex Numbers Needed in Quantum Mechanics? Some Answers For The Introductory LevelDocumento8 pagineWhy Are Complex Numbers Needed in Quantum Mechanics? Some Answers For The Introductory LevelProdan GeorgeNessuna valutazione finora
- Chapter 9 Data MiningDocumento147 pagineChapter 9 Data MiningYUTRYU8TYURTNessuna valutazione finora
- Amazon Food Review NotesDocumento37 pagineAmazon Food Review NotesThe Chosen OneNessuna valutazione finora
- D3867 16Documento11 pagineD3867 16Ricardo Aguirre100% (1)
- Lecture 33 Algebraic Computation and FFTsDocumento16 pagineLecture 33 Algebraic Computation and FFTsRitik chaudharyNessuna valutazione finora
- Super ManifoldsDocumento44 pagineSuper ManifoldsIncioNessuna valutazione finora
- Probability ManualDocumento61 pagineProbability ManualRaising StarNessuna valutazione finora
- 28th Linz Seminar On Fuzzy Set Theory, 2007Documento132 pagine28th Linz Seminar On Fuzzy Set Theory, 2007ralucam_tmNessuna valutazione finora
- CTL ManualDocumento61 pagineCTL ManualPál HústalzNessuna valutazione finora
- Linear GuestDocumento436 pagineLinear GuestManish kumarNessuna valutazione finora
- Finite-Time Stabilization of Linear Time-Varying Continuous SystemsDocumento6 pagineFinite-Time Stabilization of Linear Time-Varying Continuous SystemsChang YuNessuna valutazione finora