Potrebbero piacerti anche
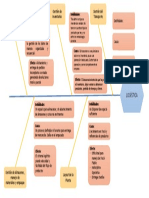
- Espina de Pescado InicialDocumento1 paginaEspina de Pescado InicialCarlos MR100% (1)
- Fase 5 Desarrollar Un Modelo Hibrido para La Gestion de ProyectoDocumento15 pagineFase 5 Desarrollar Un Modelo Hibrido para La Gestion de ProyectoMila Gomez Badillo100% (1)
- Metodologías de Gestión de Proyectos - Unidad 1 - Fase 2Documento19 pagineMetodologías de Gestión de Proyectos - Unidad 1 - Fase 2Ale ZapataNessuna valutazione finora
- Laboratorio 1013A 764 Maria Lucila Correa PradaDocumento14 pagineLaboratorio 1013A 764 Maria Lucila Correa PradaRicardoBautistaNessuna valutazione finora
- Anexo Fase 3 - Deymar BañosDocumento6 pagineAnexo Fase 3 - Deymar Bañosdeymar bañosNessuna valutazione finora
- Fase 6 - Eliana Elizabeth MorilloDocumento5 pagineFase 6 - Eliana Elizabeth MorilloEliana MorilloNessuna valutazione finora
- Conpes 3547Documento3 pagineConpes 3547Ever Polo PachecoNessuna valutazione finora
- Evidencia de Trabajo Grupal Fase 2 Gestion de ProyectosDocumento7 pagineEvidencia de Trabajo Grupal Fase 2 Gestion de ProyectosAle ZapataNessuna valutazione finora
- Fase 4 GrupoN 212040 52Documento9 pagineFase 4 GrupoN 212040 52Andrew SosaNessuna valutazione finora
- Fase 3 Fundamentos LegalesDocumento13 pagineFase 3 Fundamentos Legaleslaura_alba_santaNessuna valutazione finora
- Preinversion FRESADocumento42 paginePreinversion FRESAaguzmanlNessuna valutazione finora
- Trabajo Mapa Conceptual Teoria e Identificacion de Los Proyectos PDFDocumento6 pagineTrabajo Mapa Conceptual Teoria e Identificacion de Los Proyectos PDFFabian MunevarNessuna valutazione finora
- Fase 2 - Proyecto BPM y Mapa de DescubrimientoDocumento16 pagineFase 2 - Proyecto BPM y Mapa de DescubrimientoMARIA FERNANDA ZAMBRANO MARTINEZ50% (2)
- Ejercicio 5.23Documento2 pagineEjercicio 5.23Jose MiguelNessuna valutazione finora
- Fase 2 - Grupo 212056 - 26Documento9 pagineFase 2 - Grupo 212056 - 26Yuderly Alvarez CamposNessuna valutazione finora
- Fase - 5 - Parte B - Grupo - 212055 - 9Documento14 pagineFase - 5 - Parte B - Grupo - 212055 - 9cindyNessuna valutazione finora
- Fase 2 - Grupo 6Documento45 pagineFase 2 - Grupo 6luis felipeNessuna valutazione finora
- Fase 2 Grupo 207028 - 8Documento36 pagineFase 2 Grupo 207028 - 8Jennifer JenniferNessuna valutazione finora
- Anexo Fase 5 Parte A - Evaluar Los Riesgos Asociados Al Proyecto-Yenny ValenciaDocumento8 pagineAnexo Fase 5 Parte A - Evaluar Los Riesgos Asociados Al Proyecto-Yenny Valenciayenny valenciaNessuna valutazione finora
- Post-Tarea - Aplicación Conceptos de ErgonomíaDocumento19 paginePost-Tarea - Aplicación Conceptos de ErgonomíaOMAR JAIMES CEPEDANessuna valutazione finora
- Fase 1 - Edilberto EspinelDocumento11 pagineFase 1 - Edilberto EspinelJuan Camilo Mendoza MaldonadoNessuna valutazione finora
- Diseno de Planta Escenario 5 Localizacion de Planta Usando Metodos Matematicos 2023 1Documento7 pagineDiseno de Planta Escenario 5 Localizacion de Planta Usando Metodos Matematicos 2023 1enuar hernandezNessuna valutazione finora
- Fase 2 Grupo 46Documento11 pagineFase 2 Grupo 46Diana CasasNessuna valutazione finora
- Planteamiento de Una Aproximación A Una Iniciativa CTeI (Ciencia, Tecnología e Innovación)Documento9 paginePlanteamiento de Una Aproximación A Una Iniciativa CTeI (Ciencia, Tecnología e Innovación)Yamileth Mosquera quintoNessuna valutazione finora
- Fase 2 Configurar Una RedDocumento12 pagineFase 2 Configurar Una RedYeniffer Estepa100% (2)
- Componentes de FleximDocumento7 pagineComponentes de FleximAnonymous asdNq7YrNessuna valutazione finora
- FASE 4 - Grupo212067 - 49 Ingenieria EconomicaDocumento11 pagineFASE 4 - Grupo212067 - 49 Ingenieria EconomicaBreynerGonzalezNessuna valutazione finora
- VNT Step3 37Documento21 pagineVNT Step3 37Sebastián HabibNessuna valutazione finora
- Riesgos Ocupacionales de Los Integrantes Del Proyecto Rev 0 OFDocumento4 pagineRiesgos Ocupacionales de Los Integrantes Del Proyecto Rev 0 OFMaritza Gómez100% (1)
- Sumatec S.A. Organización y MétodosDocumento13 pagineSumatec S.A. Organización y MétodosAngie BuitragoNessuna valutazione finora
- Grupo 33 Proyecto Final Sistema de Gestión AmbientalDocumento23 pagineGrupo 33 Proyecto Final Sistema de Gestión Ambientaledwinsamuelsanchez100% (1)
- Taller 2Documento87 pagineTaller 2Dani Garcia100% (1)
- Laboratorio - Gestion de Las OperacionesDocumento12 pagineLaboratorio - Gestion de Las Operacionesdaniela medinaNessuna valutazione finora
- Trabajo - Colaborativo - Tarea - 3 - 212028 - No. 76Documento33 pagineTrabajo - Colaborativo - Tarea - 3 - 212028 - No. 76Kary BugalloNessuna valutazione finora
- Ejemplo de Carta de AVAL Empresa A UNADDocumento1 paginaEjemplo de Carta de AVAL Empresa A UNADyennyNessuna valutazione finora
- Docsity Fase 2 Comprender Identificar Analizar y Procesar La Informacion de DisenoDocumento7 pagineDocsity Fase 2 Comprender Identificar Analizar y Procesar La Informacion de DisenoYonatan PalacioNessuna valutazione finora
- Anexo 1 Fase 6 - Proyecto Final Consolidar Temas, Evaluar, Analizar y ConcluirDocumento2 pagineAnexo 1 Fase 6 - Proyecto Final Consolidar Temas, Evaluar, Analizar y Concluiralex naranjoNessuna valutazione finora
- Cultivo Mora - Andrés AcostaDocumento75 pagineCultivo Mora - Andrés AcostaBachir JalafesNessuna valutazione finora
- 805 - MARLY - MORENO - Tarea - DIBUJO NORMALIZADODocumento14 pagine805 - MARLY - MORENO - Tarea - DIBUJO NORMALIZADOMarlly MorenoNessuna valutazione finora
- Momento 2 Diseño Industrial y de ServiciosDocumento12 pagineMomento 2 Diseño Industrial y de ServiciosRENZO7624Nessuna valutazione finora
- Anexo 2 Fase 6 - Proyecto Final Consolidar Temas, Evaluar, Analizar y Concluir Fabian ChaparroDocumento3 pagineAnexo 2 Fase 6 - Proyecto Final Consolidar Temas, Evaluar, Analizar y Concluir Fabian Chaparroalex naranjo100% (1)
- Fase 1 Reconocimiento de La Unidad 1Documento10 pagineFase 1 Reconocimiento de La Unidad 1oscar tNessuna valutazione finora
- La Actividad Consta d1Documento6 pagineLa Actividad Consta d1juan camilo mendozaNessuna valutazione finora
- Certificación de Funcionalidad e Integralidad Del Proyecto Res 0661 2019Documento2 pagineCertificación de Funcionalidad e Integralidad Del Proyecto Res 0661 2019Jason MoyanoNessuna valutazione finora
- FASE 1 Reconocimiento - COMERCIO Y NEGOCIOS INTERNACIONALES - Angie CamachoDocumento19 pagineFASE 1 Reconocimiento - COMERCIO Y NEGOCIOS INTERNACIONALES - Angie CamachoAngie lisseth camacho jimenezNessuna valutazione finora
- Grupo 15 Fase 3 Diagnóstico AmbientalDocumento16 pagineGrupo 15 Fase 3 Diagnóstico AmbientalJose Ricardo Araujo PerezNessuna valutazione finora
- T1. Taller - Laboratorio Modelos de Programacion DinamicaDocumento33 pagineT1. Taller - Laboratorio Modelos de Programacion DinamicavickyNessuna valutazione finora
- Fase 5 - Grupo Colaborativo - 69.Documento48 pagineFase 5 - Grupo Colaborativo - 69.lady100% (1)
- Fase 2 - Actividad - ColaborativaDocumento29 pagineFase 2 - Actividad - Colaborativacamilo blancoNessuna valutazione finora
- Fase 2 Servicio Al ClienteDocumento2 pagineFase 2 Servicio Al ClienteDANIELA CARVAJAL CASTANONessuna valutazione finora
- Anexo Fase 3 - Calcular El Tiempo Probable Del Proyecto en Función de Su ProgramaciónDocumento8 pagineAnexo Fase 3 - Calcular El Tiempo Probable Del Proyecto en Función de Su ProgramaciónCarolina Estrada SarabiaNessuna valutazione finora
- Fase 3 - BPMN - Grupo - 5 Consolidado FinalDocumento24 pagineFase 3 - BPMN - Grupo - 5 Consolidado FinalLida CamposNessuna valutazione finora
- Modulo Diseño Industrial y de Servicios 207102Documento166 pagineModulo Diseño Industrial y de Servicios 207102Andres GiraldoNessuna valutazione finora
- Trabajo Colaborativo Diseño Industrial Y de Servicios - Grupo207102 - 15Documento15 pagineTrabajo Colaborativo Diseño Industrial Y de Servicios - Grupo207102 - 15alejandro hurtado100% (2)
- Unidad1Fase1 MaycolRodriguez 1Documento13 pagineUnidad1Fase1 MaycolRodriguez 1Maycol Yaniny Rodriguez SalamancaNessuna valutazione finora
- Fase 3 Construir La Caja de HerramientasDocumento23 pagineFase 3 Construir La Caja de HerramientasyuderlyNessuna valutazione finora
- Plantilla para Entrega de La Fase 4 - Prueba Objetiva Abierta - Sustentar La Idea de NegocioDocumento11 paginePlantilla para Entrega de La Fase 4 - Prueba Objetiva Abierta - Sustentar La Idea de Negociopaula briñezNessuna valutazione finora
- Diseño de Cadenas LogisticasDocumento6 pagineDiseño de Cadenas Logisticaskaren zorroNessuna valutazione finora
- Fase 2 - Métodos Estadísticos A La Red de ValorDocumento7 pagineFase 2 - Métodos Estadísticos A La Red de Valornelly lorena vera ramirezNessuna valutazione finora
- Fase 7 - Cierre Del ProyectoDocumento8 pagineFase 7 - Cierre Del ProyectoWilson Ricardo Sierra50% (2)
- 384763270-Proyecto-de-Ingenieria-FASE-4-1 DescargaDocumento11 pagine384763270-Proyecto-de-Ingenieria-FASE-4-1 DescargaJuanNessuna valutazione finora
- 3.0 - Hoja de Vida Minicargador Case 1845 CDocumento3 pagine3.0 - Hoja de Vida Minicargador Case 1845 CCarlos MRNessuna valutazione finora
- Espina de Pescado InicialDocumento1 paginaEspina de Pescado InicialCarlos MRNessuna valutazione finora
- Invitacion ConcursoDocumento1 paginaInvitacion ConcursoCarlos MRNessuna valutazione finora
- Fase 1 Simulador Alejandro PulidoDocumento10 pagineFase 1 Simulador Alejandro PulidoCarlos MRNessuna valutazione finora
- Presentación CursoDocumento33 paginePresentación CursoCarlos MR100% (1)
- EvaluacionDocumento6 pagineEvaluacionCarlos MRNessuna valutazione finora
- Matriz de Requisitos Legales de SST UNADDocumento94 pagineMatriz de Requisitos Legales de SST UNADCarlos MRNessuna valutazione finora
- Fase 4 - Categorizar y Analizar Los Costos de Calidad para La Optimización de Recursos - Paola ManriqueDocumento12 pagineFase 4 - Categorizar y Analizar Los Costos de Calidad para La Optimización de Recursos - Paola ManriqueCarlos MRNessuna valutazione finora
- Paso 2 ColaborativoDocumento5 paginePaso 2 ColaborativoCarlos MR100% (1)
- Fase 4. Costos de Calidad - Magnolia VásquezDocumento12 pagineFase 4. Costos de Calidad - Magnolia VásquezCarlos MRNessuna valutazione finora
- Fase 4 - Grupo Colaborativo - 212023 - 4Documento18 pagineFase 4 - Grupo Colaborativo - 212023 - 4Carlos MRNessuna valutazione finora
- Costos de La Logística InversaDocumento5 pagineCostos de La Logística InversaCarlos MRNessuna valutazione finora
- Tarea2 Carlos MontoyaDocumento10 pagineTarea2 Carlos MontoyaCarlos MRNessuna valutazione finora
- Tarea 2 - Física GeneralDocumento18 pagineTarea 2 - Física GeneralCarlos MRNessuna valutazione finora
- Cronograma Amazon ARTDocumento1 paginaCronograma Amazon ARTCarlos MRNessuna valutazione finora
- Tarea 2 Fisica DinamicaDocumento17 pagineTarea 2 Fisica DinamicaCarlos MRNessuna valutazione finora
- Laboratorio2 Física General 100413Documento21 pagineLaboratorio2 Física General 100413Carlos MRNessuna valutazione finora
- Python, GeneralidadesDocumento94 paginePython, GeneralidadesidgomezcNessuna valutazione finora
- WATSAPDocumento3 pagineWATSAPELVISNessuna valutazione finora
- EncriptacionDocumento12 pagineEncriptacionErick DíazNessuna valutazione finora
- 8ciberseguridadenlatransformaciondigitaldelosnegociosca 170416014954Documento26 pagine8ciberseguridadenlatransformaciondigitaldelosnegociosca 170416014954Ivan LlaqueNessuna valutazione finora
- Cómo Agregar Usuarios Desde El CMD - 8 PasosDocumento3 pagineCómo Agregar Usuarios Desde El CMD - 8 PasosMarcoNessuna valutazione finora
- WPR-IN-SD-02 Visualización de Pedidos y Facturas de Venta V.01Documento33 pagineWPR-IN-SD-02 Visualización de Pedidos y Facturas de Venta V.01Ray Rivera CruzNessuna valutazione finora
- Word Basico Del 40 Al 57Documento19 pagineWord Basico Del 40 Al 5724/7 mor 14fNessuna valutazione finora
- Practica APLAC 1Documento10 paginePractica APLAC 1api-3711080Nessuna valutazione finora
- 8 Infografia Puertos de RedDocumento1 pagina8 Infografia Puertos de RedJulio SuárezNessuna valutazione finora
- Requerimientos Técnicos Nomiplus - TA - NETDocumento2 pagineRequerimientos Técnicos Nomiplus - TA - NETyonatan castroNessuna valutazione finora
- Diseños de Estadios PDFDocumento43 pagineDiseños de Estadios PDFJj AgrazNessuna valutazione finora
- Pip - Python & PHPDocumento3 paginePip - Python & PHPositopicaronNessuna valutazione finora
- TEMA 6 - PLANIFICACIÓN DEL PROYECTO vs5 PDFDocumento78 pagineTEMA 6 - PLANIFICACIÓN DEL PROYECTO vs5 PDFNicolas SchmidtNessuna valutazione finora
- Manual Civil 3D 2010 - Diseã o Vial I - UnfvDocumento80 pagineManual Civil 3D 2010 - Diseã o Vial I - UnfvJuan Carlos Sanchez ParedesNessuna valutazione finora
- Resolución A Problemas Algorítmicos Aplicando Estructuras de AlmacenamientoDocumento12 pagineResolución A Problemas Algorítmicos Aplicando Estructuras de AlmacenamientoSebastian SàenzNessuna valutazione finora
- Opens UseDocumento34 pagineOpens UseJacqueline Julián JiménezNessuna valutazione finora
- Ensamble de Fuente de PoderDocumento16 pagineEnsamble de Fuente de PoderEstherSophiaRodriguezRomeroNessuna valutazione finora
- Clases de Hoy Viernes 27Documento31 pagineClases de Hoy Viernes 27maria pazNessuna valutazione finora
- Tarea Capítulo 5Documento5 pagineTarea Capítulo 5Angely marie Blanco tejadaNessuna valutazione finora
- Embargos A EatDocumento8 pagineEmbargos A EatIgnacio Suarez RodriguezNessuna valutazione finora
- Manual de Usuario Primera Entrega SamyDocumento10 pagineManual de Usuario Primera Entrega SamySamy David JNessuna valutazione finora
- Exposicion 06-12Documento20 pagineExposicion 06-12Gustavo HuertasNessuna valutazione finora
- Act - 2.10 - Diccionario de DatosDocumento7 pagineAct - 2.10 - Diccionario de Datosaxel vladimir mayorgaNessuna valutazione finora
- 1-PM Paso 1Documento10 pagine1-PM Paso 1Rodrigo ortegaNessuna valutazione finora
- Evolucion de Las Bases de DatosDocumento10 pagineEvolucion de Las Bases de DatosFrancisco BozoNessuna valutazione finora
- Presupuesto SedimentadorDocumento4 paginePresupuesto SedimentadorhamletNessuna valutazione finora
- Lab 13 - Seguridad en WindowsDocumento20 pagineLab 13 - Seguridad en WindowsJhon Rugel BarreraNessuna valutazione finora
- Conceptos Generales 2018Documento25 pagineConceptos Generales 2018Ivan Alvaro Torres RoblesNessuna valutazione finora
- Desarrolle La Resolución de Los Problemas Mediante Sus Algoritmos en Pseudocódigo 2Documento6 pagineDesarrolle La Resolución de Los Problemas Mediante Sus Algoritmos en Pseudocódigo 2LizEblaNessuna valutazione finora
- Angelo FloresDocumento1 paginaAngelo FloresVanessa MaulenNessuna valutazione finora