Potrebbero piacerti anche
- Module 1 - Structural LoadsDocumento19 pagineModule 1 - Structural LoadsJerico Pilapil NamucoNessuna valutazione finora
- Types of Structures and LoadsDocumento32 pagineTypes of Structures and LoadsIana Leyno100% (1)
- Introduction to Design of Building StructuresDa EverandIntroduction to Design of Building StructuresValutazione: 4 su 5 stelle4/5 (22)
- Analysis of Buildings For Gravity LoadsDocumento10 pagineAnalysis of Buildings For Gravity LoadsPrashant SunagarNessuna valutazione finora
- Stereo Magazine Issue 02Documento66 pagineStereo Magazine Issue 02LipsticNessuna valutazione finora
- Dji Phantom 4 RTK Book F-2Documento18 pagineDji Phantom 4 RTK Book F-2Liu Purnomo100% (1)
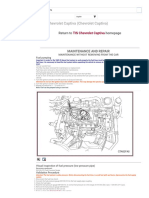
- Chevrolet Captiva Service Manual. MAINTENANCE AND REPAIR.Documento57 pagineChevrolet Captiva Service Manual. MAINTENANCE AND REPAIR.krisdiarto@gmail.com96% (23)
- Composite Steel and Concrete Structural Members: Composite Steel and Concrete Structures: Fundamental Behaviour (Second Edition)Da EverandComposite Steel and Concrete Structural Members: Composite Steel and Concrete Structures: Fundamental Behaviour (Second Edition)Valutazione: 4 su 5 stelle4/5 (10)
- PurlinDocumento19 paginePurlinLia Ame100% (2)
- 1 Ce131-1 Introduction To Structural AnalysisDocumento17 pagine1 Ce131-1 Introduction To Structural AnalysisIan Trinidad100% (1)
- Stability of Structures: Principles and ApplicationsDa EverandStability of Structures: Principles and ApplicationsValutazione: 4 su 5 stelle4/5 (4)
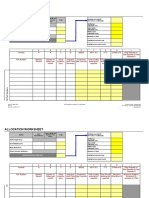
- Supplier Run Rate CalculatorDocumento9 pagineSupplier Run Rate CalculatordcevipinNessuna valutazione finora
- Types of Structural FormsDocumento21 pagineTypes of Structural FormsCorwyn Byrne88% (8)
- Basic Theory of Structures: The Commonwealth and International Library: Mechanical Engineering DivisionDa EverandBasic Theory of Structures: The Commonwealth and International Library: Mechanical Engineering DivisionValutazione: 4 su 5 stelle4/5 (4)
- Columns Beams SlabsDocumento48 pagineColumns Beams SlabsWilson Muguro100% (1)
- Theory of StructuresDocumento11 pagineTheory of StructuresPaul MachariaNessuna valutazione finora
- Reinforced Concrete Buildings: Behavior and DesignDa EverandReinforced Concrete Buildings: Behavior and DesignValutazione: 5 su 5 stelle5/5 (1)
- Elevated Intz Tank 279Documento23 pagineElevated Intz Tank 279Navasivayam Sankar100% (2)
- Lecture 5 SPACE FRAMING PDFDocumento109 pagineLecture 5 SPACE FRAMING PDFRaya VillafloresNessuna valutazione finora
- Environmental AuditDocumento22 pagineEnvironmental AuditungkumariamNessuna valutazione finora
- RCC StructuresDocumento106 pagineRCC Structuresjitesh100% (1)
- Tem 3413354 0101Documento67 pagineTem 3413354 0101Kolawole KehindeNessuna valutazione finora
- Types of Structures and LoadsDocumento17 pagineTypes of Structures and LoadsRyan Forayo BosngonNessuna valutazione finora
- Module 1.1Documento5 pagineModule 1.1ChuckieNessuna valutazione finora
- Lesson 1Documento17 pagineLesson 1MikeNessuna valutazione finora
- CE4 Module 1Documento15 pagineCE4 Module 1bacalczynahmaeNessuna valutazione finora
- Slope DeflectionDocumento18 pagineSlope DeflectionSagar D ShahNessuna valutazione finora
- Plate #1 Introduction Read About Structural Analysis of Theory of StructuresDocumento13 paginePlate #1 Introduction Read About Structural Analysis of Theory of StructuresCristina Mauren P. PajesNessuna valutazione finora
- Introduction To Structural EngineeringDocumento7 pagineIntroduction To Structural EngineeringCjoy De RoxasNessuna valutazione finora
- Beam and Wall InteractionDocumento15 pagineBeam and Wall Interactionmikailadam656Nessuna valutazione finora
- TOS I Topic 1Documento12 pagineTOS I Topic 1Daisy OgollaNessuna valutazione finora
- Classification of StructuresDocumento8 pagineClassification of StructuresMarco TitorNessuna valutazione finora
- Feng Fu - Design and Analysis of Tall and Complex Structures-Butterworth-Heinemann (2018)Documento40 pagineFeng Fu - Design and Analysis of Tall and Complex Structures-Butterworth-Heinemann (2018)Eria NingsihNessuna valutazione finora
- Chap3 FramesDocumento76 pagineChap3 FramesPalaniappan ArasappanNessuna valutazione finora
- Structural Theory Chapter 1Documento12 pagineStructural Theory Chapter 1MAGNI FICATNessuna valutazione finora
- Engineering Mechanics Module 2Documento32 pagineEngineering Mechanics Module 2Abigail SiatrezNessuna valutazione finora
- Definitions and Terminologies in Theory of Structures 1Documento6 pagineDefinitions and Terminologies in Theory of Structures 1Lemuel John CristobalNessuna valutazione finora
- TOS1 (Reference)Documento7 pagineTOS1 (Reference)DJNessuna valutazione finora
- Introduction To Structural AnalysisDocumento4 pagineIntroduction To Structural AnalysisCNessuna valutazione finora
- Lecture 4 Columns DesignDocumento33 pagineLecture 4 Columns DesignOlesea NesterencoNessuna valutazione finora
- Introduction To Structual TheoryDocumento19 pagineIntroduction To Structual TheoryVictor LimNessuna valutazione finora
- Lecture 1Documento22 pagineLecture 1Mr. Danish SaeedNessuna valutazione finora
- RC II - chapter-4-LNDocumento67 pagineRC II - chapter-4-LNFenta NebiyouNessuna valutazione finora
- Different Loads of StructuresDocumento21 pagineDifferent Loads of StructuresXristell SalutNessuna valutazione finora
- CIEN-2107 Elementary Structural Analysis: Course OutlineDocumento29 pagineCIEN-2107 Elementary Structural Analysis: Course OutlineENGR MUHAMMAD NOMANNessuna valutazione finora
- Theory of Structures Course NotesDocumento10 pagineTheory of Structures Course NotesT N Roland BourgeNessuna valutazione finora
- Introduction To Structural AnalysisDocumento63 pagineIntroduction To Structural AnalysisSobana RajandranNessuna valutazione finora
- Introduction To Structural Analysis: 1.2 Role of Structural Analysis in Structural Engineering ProjectsDocumento16 pagineIntroduction To Structural Analysis: 1.2 Role of Structural Analysis in Structural Engineering ProjectsAna Celeste LiborNessuna valutazione finora
- Types of Structures and Loads: IntroductionDocumento14 pagineTypes of Structures and Loads: IntroductionMohammed ShalaanNessuna valutazione finora
- Prelim Period (Weeks 1-2)Documento7 paginePrelim Period (Weeks 1-2)DJNessuna valutazione finora
- Anexo 1 ColumnasDocumento18 pagineAnexo 1 ColumnasKharen CandiottiNessuna valutazione finora
- Structural Design of G +2 Introductory PartDocumento12 pagineStructural Design of G +2 Introductory PartOumer MohammedNessuna valutazione finora
- BEC6Documento10 pagineBEC6Edelson RapadaNessuna valutazione finora
- Modern Chap 2Documento11 pagineModern Chap 2AMANUEL BABBANessuna valutazione finora
- Introduction To Structural Analysis-Part 1Documento30 pagineIntroduction To Structural Analysis-Part 1Hiew Ching YongNessuna valutazione finora
- Truss System: Arbaminch UniversityDocumento55 pagineTruss System: Arbaminch UniversityHaileyesus EsubalewNessuna valutazione finora
- Module-1Documento75 pagineModule-1pakistani challangeNessuna valutazione finora
- TOS I - Chapter 1Documento27 pagineTOS I - Chapter 1michael jayNessuna valutazione finora
- Name: Section: Schedule: Date:: Course Code: ES341 Module #1Documento19 pagineName: Section: Schedule: Date:: Course Code: ES341 Module #1Cowar D. CourageNessuna valutazione finora
- COLUMNDocumento24 pagineCOLUMNBaysa CamadNessuna valutazione finora
- Chapter 9 - Frame Analysis (New)Documento56 pagineChapter 9 - Frame Analysis (New)sorento91050% (2)
- Swaraj Patil Assignment-3Documento10 pagineSwaraj Patil Assignment-3swaraj patilNessuna valutazione finora
- BT115-RESEARCH 3A-Husana, Thessaly Aubrey S. - Section ADocumento48 pagineBT115-RESEARCH 3A-Husana, Thessaly Aubrey S. - Section AThessaly HusanaNessuna valutazione finora
- Chapter 1 BEAMDocumento25 pagineChapter 1 BEAMDawit TesfayNessuna valutazione finora
- Notes CE60StabilityDeterminacyDocumento4 pagineNotes CE60StabilityDeterminacyMusicMeowNessuna valutazione finora
- Trusses Are Used in A Broad Range of Buildings, Mainly Where There Is A Requirement For Very Long Spans, SuchDocumento14 pagineTrusses Are Used in A Broad Range of Buildings, Mainly Where There Is A Requirement For Very Long Spans, SuchHaden MateoNessuna valutazione finora
- The Four Basic SystemsDocumento31 pagineThe Four Basic SystemsRicky TologanaNessuna valutazione finora
- Deflection CurvesDocumento10 pagineDeflection Curvesewineta assefaNessuna valutazione finora
- 04 MomentDistribution PDFDocumento88 pagine04 MomentDistribution PDFSimran Radheshyam SoniNessuna valutazione finora
- Chapter 5Documento17 pagineChapter 5ewineta assefaNessuna valutazione finora
- 10-5 Moments o Finertia For Composite Areas PDFDocumento14 pagine10-5 Moments o Finertia For Composite Areas PDFewineta assefaNessuna valutazione finora
- 10-2 Parallel Axis Theorem For An AreaDocumento4 pagine10-2 Parallel Axis Theorem For An Areaewineta assefaNessuna valutazione finora
- 10-7 Moments of Inertia For An Area About Inclined Axes PDFDocumento13 pagine10-7 Moments of Inertia For An Area About Inclined Axes PDFewineta assefaNessuna valutazione finora
- 10-0 Moments of InertiaDocumento4 pagine10-0 Moments of Inertiaewineta assefaNessuna valutazione finora
- 3-0 Equilibrium of Aparticle PDFDocumento3 pagine3-0 Equilibrium of Aparticle PDFewineta assefaNessuna valutazione finora
- 3-3 Coplanar SystemsDocumento19 pagine3-3 Coplanar Systemsewineta assefaNessuna valutazione finora
- 11-0 VirtualworkDocumento4 pagine11-0 Virtualworkewineta assefaNessuna valutazione finora
- 11-1 Definition of Work and Virtual Work PDFDocumento10 pagine11-1 Definition of Work and Virtual Work PDFewineta assefaNessuna valutazione finora
- 11-1 Definition of Work and Virtual Work PDFDocumento10 pagine11-1 Definition of Work and Virtual Work PDFewineta assefaNessuna valutazione finora
- 3-2 The Free-Body Diagram PDFDocumento14 pagine3-2 The Free-Body Diagram PDFewineta assefaNessuna valutazione finora
- 3-4 Three-Dimensional Force Systems PDFDocumento24 pagine3-4 Three-Dimensional Force Systems PDFewineta assefaNessuna valutazione finora
- 3-1 Condition For The Equilibrium of AparticleDocumento2 pagine3-1 Condition For The Equilibrium of Aparticleewineta assefaNessuna valutazione finora
- Engineering Mechanics: Statics: General PrinciplesDocumento45 pagineEngineering Mechanics: Statics: General PrinciplesnabilahNessuna valutazione finora
- Unit Iii PDFDocumento7 pagineUnit Iii PDFShashank100% (1)
- CS1 Course OutlineDocumento2 pagineCS1 Course Outlineapi-27149177Nessuna valutazione finora
- GAPS Guidelines: Deep Fat FryersDocumento4 pagineGAPS Guidelines: Deep Fat FryersAsad KhanNessuna valutazione finora
- E-Payment System On E-Commerce in India: Karamjeet Kaur, Dr. Ashutosh PathakDocumento9 pagineE-Payment System On E-Commerce in India: Karamjeet Kaur, Dr. Ashutosh Pathakdharshinee1961Nessuna valutazione finora
- Lecture 3 - Rainfall Abstraction Computation - Rainfall Abstraction ComputationDocumento33 pagineLecture 3 - Rainfall Abstraction Computation - Rainfall Abstraction ComputationNavjotSinghNessuna valutazione finora
- Types of Processors and RAM'sDocumento26 pagineTypes of Processors and RAM'sSneha NairNessuna valutazione finora
- Safety Inventory ExercisesDocumento12 pagineSafety Inventory ExercisesParnabho KunduNessuna valutazione finora
- Adjustable Juice Groove Jig: Step 1: Jig Base and Bit DistanceDocumento5 pagineAdjustable Juice Groove Jig: Step 1: Jig Base and Bit DistanceRod HyattNessuna valutazione finora
- AMICO InstallationManual PDFDocumento60 pagineAMICO InstallationManual PDFfernandoNessuna valutazione finora
- Amadeus Web ServicesDocumento2 pagineAmadeus Web ServicesBoris ChoiNessuna valutazione finora
- SG-05 Safety Guideline For Illumination at WorkplaceDocumento5 pagineSG-05 Safety Guideline For Illumination at WorkplacebsrchandruNessuna valutazione finora
- EVI DC Inverter Technical Manual 2 Capacity TableDocumento67 pagineEVI DC Inverter Technical Manual 2 Capacity TableMouyed Al QasemNessuna valutazione finora
- 92 - Summary of Items Discussed in 4 - 2021 ADF On 13.8.2021Documento20 pagine92 - Summary of Items Discussed in 4 - 2021 ADF On 13.8.2021trickyggNessuna valutazione finora
- Module 3 Density Altitude ExperimentDocumento3 pagineModule 3 Density Altitude ExperimentIvan100% (1)
- Polylux WebkatalogDocumento96 paginePolylux WebkatalogNesil Abiera50% (2)
- CAG Report On Antrix-Devas DealDocumento76 pagineCAG Report On Antrix-Devas DealCanary Trap100% (1)
- Plastic Coatings: Advanced Polymer Technologies ForDocumento13 paginePlastic Coatings: Advanced Polymer Technologies ForFazlul HoqueNessuna valutazione finora
- Blackboard 9.1Documento49 pagineBlackboard 9.1ds532Nessuna valutazione finora
- M2.2.9 Critical Review and Selection of NDT MethodsDocumento13 pagineM2.2.9 Critical Review and Selection of NDT MethodsAldy Bagus PratamaNessuna valutazione finora
- (Pasig) Certificate of OccupancyDocumento12 pagine(Pasig) Certificate of OccupancyAndrew MarasiganNessuna valutazione finora
- Scope: Ferritic Heat-Resistant Steel TK 1.4762Documento5 pagineScope: Ferritic Heat-Resistant Steel TK 1.4762Siis IngenieriaNessuna valutazione finora
- 507 39 Solutions-Instructor-manual Ch7 DRCSDocumento13 pagine507 39 Solutions-Instructor-manual Ch7 DRCSArun GoyalNessuna valutazione finora
- Contra Dam, SwissDocumento31 pagineContra Dam, SwissSudheekar ReddyNessuna valutazione finora
- lm230wf1 Tla6Documento32 paginelm230wf1 Tla6Charlie SierraNessuna valutazione finora