Potrebbero piacerti anche
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- RTN 900 V100R006C00 Configuration Guide 04Documento90 pagineRTN 900 V100R006C00 Configuration Guide 04maximusandNessuna valutazione finora
- Enabling Secure Software-Defined Networking For Wireless and Cellular Networks Through VirtualizationDocumento7 pagineEnabling Secure Software-Defined Networking For Wireless and Cellular Networks Through VirtualizationParanthaman GNessuna valutazione finora
- Associate - Networking Version 1.0: Certification DescriptionDocumento4 pagineAssociate - Networking Version 1.0: Certification Descriptionson.600Nessuna valutazione finora
- L&T Icl - 01Documento1 paginaL&T Icl - 01Structures ProductionNessuna valutazione finora
- Power Your Signal: Antenna SpecificationsDocumento3 paginePower Your Signal: Antenna SpecificationsКурбан УмархановNessuna valutazione finora
- Join My Telegram Group For All Latest DataDocumento6 pagineJoin My Telegram Group For All Latest DataAtiq KhalilNessuna valutazione finora
- Samsung MAX-DS750 PDFDocumento38 pagineSamsung MAX-DS750 PDFboroda2410100% (1)
- Computer Hacking Forensic Investigator v8: Công Ty Cổ Phần Trường Cntt Tân ĐứcDocumento5 pagineComputer Hacking Forensic Investigator v8: Công Ty Cổ Phần Trường Cntt Tân ĐứcSơn HảiNessuna valutazione finora
- T-REC-G.979-201611-I!!PDF-E (Submarine Cables Etc)Documento16 pagineT-REC-G.979-201611-I!!PDF-E (Submarine Cables Etc)diegofennerNessuna valutazione finora
- 23003-7b0 Numbering, Addressing and IdentificationDocumento56 pagine23003-7b0 Numbering, Addressing and IdentificationJose Vicente Melo CortésNessuna valutazione finora
- DCC Project ReportDocumento12 pagineDCC Project Reportjaya bhutekarNessuna valutazione finora
- Module 1: Networking Today: Introduction To Networks v7.0 (ITN)Documento22 pagineModule 1: Networking Today: Introduction To Networks v7.0 (ITN)Emily GabrielaNessuna valutazione finora
- Relevance of ICTDocumento3 pagineRelevance of ICTAila BolanosNessuna valutazione finora
- Digicom MDocumento27 pagineDigicom MJohn Lester Laurentino RamirezNessuna valutazione finora
- RFC 2544Documento31 pagineRFC 2544trebeardNessuna valutazione finora
- 1 Darlington Pair AmplifierDocumento2 pagine1 Darlington Pair AmplifierSheikh Noor MohammadNessuna valutazione finora
- DSP Algorithm and Architecture PDFDocumento199 pagineDSP Algorithm and Architecture PDFBheemareddiNessuna valutazione finora
- Concept:: Press The CH-and CH+ Button at The Same Time Enter The Function ModeDocumento2 pagineConcept:: Press The CH-and CH+ Button at The Same Time Enter The Function ModeSasa PavlovicNessuna valutazione finora
- Acu Plus Controller Data SheetDocumento2 pagineAcu Plus Controller Data SheetCharmer JiaNessuna valutazione finora
- T754 - Service ManualDocumento74 pagineT754 - Service ManualjuniorsommaiorNessuna valutazione finora
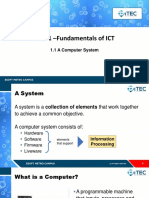
- 875-1586267445115-Unit 1.1 ComputerSystemDocumento12 pagine875-1586267445115-Unit 1.1 ComputerSystemCool MarttNessuna valutazione finora
- Ethernet Interface Board Model: If1-Et01 User's Manual: Citizen Systems Japan Co., LTDDocumento24 pagineEthernet Interface Board Model: If1-Et01 User's Manual: Citizen Systems Japan Co., LTDmahdi elmayNessuna valutazione finora
- Unit 2Documento84 pagineUnit 2Ashok (Ak)Nessuna valutazione finora
- DARPS System - Processor Unit & HMI Unit (Konsberg G202-45 & G202-49)Documento2 pagineDARPS System - Processor Unit & HMI Unit (Konsberg G202-45 & G202-49)VishalNessuna valutazione finora
- Chapter 10 Technoloy Chuchu.Documento19 pagineChapter 10 Technoloy Chuchu.jessajenndelarimanNessuna valutazione finora
- 5G Core PFCP Intrusion Detection DatasetDocumento4 pagine5G Core PFCP Intrusion Detection DatasetSotiris GoudosNessuna valutazione finora
- Optibox MP - Cenovnik Februar, 2013Documento23 pagineOptibox MP - Cenovnik Februar, 2013Max MaximNessuna valutazione finora
- Arc-164 ManualDocumento140 pagineArc-164 Manualj.wennikNessuna valutazione finora
- Fortios Handbook 525 PDFDocumento2.853 pagineFortios Handbook 525 PDFJuan Manuel AlmironNessuna valutazione finora
- Country Network Name PrefixesDocumento3 pagineCountry Network Name Prefixesوليد خالدNessuna valutazione finora