Potrebbero piacerti anche
- Cronograma de Experiencias (ML 125)Documento2 pagineCronograma de Experiencias (ML 125)Joel RiveraNessuna valutazione finora
- 1era Práctica-Online-ResolucionDocumento2 pagine1era Práctica-Online-ResolucionMiguel Huallpa HNessuna valutazione finora
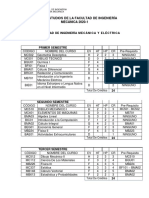
- Malla CurricularDocumento4 pagineMalla CurricularMiguel Huallpa HNessuna valutazione finora
- El Neuromarketing Investiga:: Psicología Del ConsumidorDocumento2 pagineEl Neuromarketing Investiga:: Psicología Del ConsumidorMiguel Huallpa HNessuna valutazione finora
- Datos Experiencia 1Documento2 pagineDatos Experiencia 1Miguel Huallpa HNessuna valutazione finora
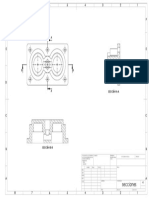
- Unifilar PDFDocumento1 paginaUnifilar PDFMiguel Huallpa HNessuna valutazione finora
- Martes OChavezDocumento32 pagineMartes OChavezLuis Francisco Calderon EspinozaNessuna valutazione finora
- NuevoDocumento7 pagineNuevoMiguel Huallpa HNessuna valutazione finora
- Símbolos Gráficos en ElectricidadDocumento138 pagineSímbolos Gráficos en Electricidadweas77694% (17)
- MHDocumento1 paginaMHMiguel Huallpa HNessuna valutazione finora
- Transformadores de MedidaDocumento3 pagineTransformadores de Medidaerick appleNessuna valutazione finora
- Curriculum Vitae DocentesDocumento2.417 pagineCurriculum Vitae DocentesRicardho Jimenez100% (1)
- Rne 010Documento45 pagineRne 010Ximena montesNessuna valutazione finora
- Examen Parcial de Fisica I UnmsmDocumento2 pagineExamen Parcial de Fisica I UnmsmMiguel Huallpa H50% (4)
- 2017-2 Uni Cin de Cuerpo Rig-2d 2017-1ufDocumento62 pagine2017-2 Uni Cin de Cuerpo Rig-2d 2017-1ufRosi Marleny Machuca rojasNessuna valutazione finora
- 2017-2 Uni Cin de Cuerpo Rig-2d 2017-1ufDocumento62 pagine2017-2 Uni Cin de Cuerpo Rig-2d 2017-1ufRosi Marleny Machuca rojasNessuna valutazione finora
- 06 VigasDocumento12 pagine06 VigasCleo Roman LazoNessuna valutazione finora
- ACFrOgA3VhqegrD0ya1gyv5XDx9yu1m1jLazyn7jCT ED6txk4Iw6fkvCEi6tJh85dawQAafs4HoG2Mix3Q A - UsN01 QQ8cUd9EwhV9kg1aUCcVMAVssM9Dqspi850 PDFDocumento12 pagineACFrOgA3VhqegrD0ya1gyv5XDx9yu1m1jLazyn7jCT ED6txk4Iw6fkvCEi6tJh85dawQAafs4HoG2Mix3Q A - UsN01 QQ8cUd9EwhV9kg1aUCcVMAVssM9Dqspi850 PDFMiguel Huallpa HNessuna valutazione finora
- Probabilidad CondicionadaDocumento15 pagineProbabilidad CondicionadaAndres AldayNessuna valutazione finora
- EtimologíaDocumento2 pagineEtimologíaMiguel Huallpa HNessuna valutazione finora
- Chavetas PDFDocumento1 paginaChavetas PDFMiguel Huallpa HNessuna valutazione finora
- Torno CNCDocumento17 pagineTorno CNCMiguel Huallpa HNessuna valutazione finora
- SeccionesDocumento1 paginaSeccionesMiguel Huallpa HNessuna valutazione finora
- Informe - ANALISIS-DE-ARENA-2-20 PDFDocumento19 pagineInforme - ANALISIS-DE-ARENA-2-20 PDFMiguel Huallpa HNessuna valutazione finora
- Secciones PDFDocumento1 paginaSecciones PDFMiguel Huallpa HNessuna valutazione finora
- Semana S1Documento23 pagineSemana S1Persy Brandom Tafur VargasNessuna valutazione finora
- EconomiaDocumento3 pagineEconomiaMiguel Huallpa HNessuna valutazione finora
- Ensayo MineriaDocumento3 pagineEnsayo MineriaMiguel Huallpa HNessuna valutazione finora
- Regiones Con Mayor Ingreso de Canon MineroDocumento3 pagineRegiones Con Mayor Ingreso de Canon MineroMiguel Huallpa HNessuna valutazione finora
- Evaluacion 2, Analisis Financiero, Taller. Hiliana VargasDocumento6 pagineEvaluacion 2, Analisis Financiero, Taller. Hiliana VargasrayzildaNessuna valutazione finora
- Denuncia Maltrato-016Documento4 pagineDenuncia Maltrato-016josejimeno0Nessuna valutazione finora
- Mi Nio Interior Herramientas para Construir Relaciones Saludables Matilde GarvichDocumento142 pagineMi Nio Interior Herramientas para Construir Relaciones Saludables Matilde GarvichEli80% (15)
- Introduccion Al CBD Folleto - 0Documento2 pagineIntroduccion Al CBD Folleto - 0Gabriel Rosujovsky100% (1)
- La Perla - Jhon Steinbeck Jueves 19Documento2 pagineLa Perla - Jhon Steinbeck Jueves 19Ana0% (1)
- Actividad en Clase - Código de TrabajoDocumento4 pagineActividad en Clase - Código de Trabajoerik alberto bayona medina100% (1)
- Un Lance de Dados - Stéphane Mallarmé - Ámbar Cooperativa EditorialDocumento104 pagineUn Lance de Dados - Stéphane Mallarmé - Ámbar Cooperativa EditorialRicardoCastro100% (5)
- Formulación de hipótesis de investigaciónDocumento11 pagineFormulación de hipótesis de investigaciónDiplomados De Especialización TrujilloNessuna valutazione finora
- La Evolucion de La Teoria Traumatica en El - Angeles Codosero MedranoDocumento12 pagineLa Evolucion de La Teoria Traumatica en El - Angeles Codosero MedranoJessica MézquitaNessuna valutazione finora
- Contaminación Del Rio YuracyacuDocumento4 pagineContaminación Del Rio YuracyacuAnonymous PF1YlZ100% (3)
- El Maravillo Walmish y AntañahuiDocumento6 pagineEl Maravillo Walmish y AntañahuiEleonora Pajuelo MelladoNessuna valutazione finora
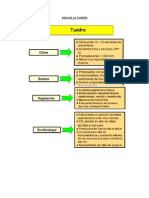
- Vida en La TundraDocumento24 pagineVida en La TundraSandro Larry Mamani Isidro100% (1)
- Design Thinking-12-19Documento8 pagineDesign Thinking-12-19Anabelen fsNessuna valutazione finora
- Ausentismo y Desercion en Preescolar PDFDocumento2 pagineAusentismo y Desercion en Preescolar PDFAlex100% (1)
- Dimensiones y Niveles Del TextoDocumento18 pagineDimensiones y Niveles Del TextoLuisa CorreaNessuna valutazione finora
- Sentencia Del Tribunal Sobre Libre Transito (Rejas) 03482-2005-HCDocumento10 pagineSentencia Del Tribunal Sobre Libre Transito (Rejas) 03482-2005-HCgustavo chahunNessuna valutazione finora
- El Método Pilates.Documento14 pagineEl Método Pilates.PAOLA SILVA FUENTESNessuna valutazione finora
- Cartera y VentasDocumento47 pagineCartera y VentasAvril ViverosNessuna valutazione finora
- Prueba Evaluación Diagnostica CCSS 2° GradoDocumento5 paginePrueba Evaluación Diagnostica CCSS 2° GradoReginalda Silva dazaNessuna valutazione finora
- Notariado Edad MediaDocumento7 pagineNotariado Edad MediaEugenia Bernal0% (1)
- Metodología CartesianaDocumento7 pagineMetodología CartesianaGloria SandovalNessuna valutazione finora
- Franck-Hertz experimento cuantización energía átomos mercurioDocumento6 pagineFranck-Hertz experimento cuantización energía átomos mercuriojimena3330Nessuna valutazione finora
- Códigos de ContralorDocumento20 pagineCódigos de ContralorAdrian BerdunNessuna valutazione finora
- Diagnosticar motivación universidad San AgustínDocumento12 pagineDiagnosticar motivación universidad San AgustínSonia Elizabeth Uscca NoaNessuna valutazione finora
- Daniel Oliveros P. Ecuaciones e Inecuaciones Con Valor AbsolutoDocumento4 pagineDaniel Oliveros P. Ecuaciones e Inecuaciones Con Valor Absolutodoliver1Nessuna valutazione finora
- PROTOCOLO DE DERIVACIÓN Circular - Eoep - 2021-2022Documento15 paginePROTOCOLO DE DERIVACIÓN Circular - Eoep - 2021-2022silviavvNessuna valutazione finora
- Sociedad Del DesconocimientoDocumento8 pagineSociedad Del DesconocimientoJohn Jairo Barrero TobarNessuna valutazione finora
- Principios Del Del Derecho NotarialDocumento14 paginePrincipios Del Del Derecho Notarialcarolina valeroNessuna valutazione finora
- Origen Del EstadoDocumento6 pagineOrigen Del EstadoGINA STERLING GUEVARA WATSONNessuna valutazione finora
- Clases y Textos SemióticaDocumento93 pagineClases y Textos SemióticaBar AraujoNessuna valutazione finora