Potrebbero piacerti anche
- Laboratorio FinalDocumento17 pagineLaboratorio FinalNelson SepulvedaNessuna valutazione finora
- ABP2Documento19 pagineABP2FelipeAlfonsoMuñozMorenoNessuna valutazione finora
- Informe Pid Cascada FeedforwardDocumento19 pagineInforme Pid Cascada FeedforwardNelson Eliseo Araya Espinoza50% (2)
- Sistema Puende de Grua y CargaDocumento6 pagineSistema Puende de Grua y CargaNayjenyer' Díaz'100% (1)
- Informe Control Automatico - Experiencia 4Documento9 pagineInforme Control Automatico - Experiencia 4Sergio Diaz PardoNessuna valutazione finora
- Instrumentacion y ControlDocumento22 pagineInstrumentacion y Controljara cristopherNessuna valutazione finora
- Proyecto de Titulo - Instituto Profesional Santo Tomas Arica - Alejandro VillalobosDocumento101 pagineProyecto de Titulo - Instituto Profesional Santo Tomas Arica - Alejandro VillalobosAlejandro VillalobosNessuna valutazione finora
- 2° Laboratorio (Transmisor de Temperatura)Documento8 pagine2° Laboratorio (Transmisor de Temperatura)Esteban GonzalezNessuna valutazione finora
- Informe Evaluacion 2Documento18 pagineInforme Evaluacion 2Leonardo MaliqueoNessuna valutazione finora
- FabelecDocumento48 pagineFabelecSebastian Andres Monsalves Riquelme100% (1)
- Conexión PLC sx2Documento17 pagineConexión PLC sx2Deyanira Guzman Escobar100% (1)
- Ev3 Aupa08 Control No LinealDocumento14 pagineEv3 Aupa08 Control No LinealmarcelovelososaezNessuna valutazione finora
- Sitemas de Control Laboratorio FinalDocumento15 pagineSitemas de Control Laboratorio FinalMarco Cordova Ricra100% (1)
- Tarea 1 ELO 377Documento3 pagineTarea 1 ELO 377Germán Sandoval AndradeNessuna valutazione finora
- EVA - 1 - MecanismosDocumento4 pagineEVA - 1 - MecanismosFrancesco Godoy Avalos100% (1)
- Inversor OnGrid Instalación y ConfiguraciónDocumento21 pagineInversor OnGrid Instalación y ConfiguraciónjhonNessuna valutazione finora
- ScadaDocumento18 pagineScadaguaxo salvajeNessuna valutazione finora
- 5 ConAdaIndDocumento45 pagine5 ConAdaIndGuillermo Crothers StevensNessuna valutazione finora
- 04 Clase - Domótica Con PLCDocumento28 pagine04 Clase - Domótica Con PLChernandezpabl3312Nessuna valutazione finora
- Resumen Ejecutivo Pendulo InvertidoDocumento20 pagineResumen Ejecutivo Pendulo InvertidoGerald Dalbie Solís100% (1)
- Tarea U2 T1 Elvis ValenzuelaDocumento8 pagineTarea U2 T1 Elvis ValenzuelaCiberSpieCoyhaiqueNessuna valutazione finora
- 455 2018 Los PresidentesDocumento3 pagine455 2018 Los PresidentesClaudia ZamoranoNessuna valutazione finora
- Examen JAVA Duoc UC 2010Documento6 pagineExamen JAVA Duoc UC 2010NanoNessuna valutazione finora
- Configuracion PLC DELTADocumento12 pagineConfiguracion PLC DELTABayron PlanettNessuna valutazione finora
- AAI HIAC02 HIAC02 PPT ControldeprocesosAutomatizados4Documento17 pagineAAI HIAC02 HIAC02 PPT ControldeprocesosAutomatizados4jaavieerkrilex jaaiestoNessuna valutazione finora
- Control de Sistemas No Lineales - Sira RamirezDocumento17 pagineControl de Sistemas No Lineales - Sira RamirezDiego MV100% (1)
- 2210B SPA - Teoria - Vers 2014Documento32 pagine2210B SPA - Teoria - Vers 2014Johan MorenoNessuna valutazione finora
- Linealización de Sistemas de Control Automáticos.Documento8 pagineLinealización de Sistemas de Control Automáticos.FelipeAlfonsoMuñozMorenoNessuna valutazione finora
- Control AutomáticoDocumento70 pagineControl AutomáticoMarcos Schlegel100% (1)
- Informe-Proyecto-Se-La Florida PDFDocumento49 pagineInforme-Proyecto-Se-La Florida PDFcarlosmorgadohdzNessuna valutazione finora
- Presentacion Uso de PLC. CorreguidoDocumento49 paginePresentacion Uso de PLC. CorreguidopatograndonNessuna valutazione finora
- Tarea Evaluativa N°3 - UBB PDFDocumento1 paginaTarea Evaluativa N°3 - UBB PDFMomo Nyuu De MuñozNessuna valutazione finora
- Guia Programación PLCDocumento10 pagineGuia Programación PLCCristian Rene Orozco PerezNessuna valutazione finora
- Diagramas de BodeDocumento7 pagineDiagramas de BodeRené Francisco Utreras CrucesNessuna valutazione finora
- Informe #2 ControlDocumento4 pagineInforme #2 ControlDanielRuizNessuna valutazione finora
- 0 - TheveninDocumento19 pagine0 - TheveninDOUSAN ALEU100% (2)
- Presentación Instalación HIAC03Documento39 paginePresentación Instalación HIAC03diego fuentesNessuna valutazione finora
- Resumen Ejecutivo - Doc 2Documento14 pagineResumen Ejecutivo - Doc 2Felipe RivasNessuna valutazione finora
- Ejercicio 33 Regulador de CentrífugoDocumento3 pagineEjercicio 33 Regulador de CentrífugodeivisNessuna valutazione finora
- Información Laboratorio de CADocumento11 pagineInformación Laboratorio de CADamian HidalgoNessuna valutazione finora
- Certificado de Especialidad I: Digitalización Industrial IDocumento16 pagineCertificado de Especialidad I: Digitalización Industrial Ijean torrejonNessuna valutazione finora
- AscensorDocumento6 pagineAscensorfernando0% (1)
- Sim 808Documento5 pagineSim 808jimmyNessuna valutazione finora
- Foro 4.2 PDFDocumento14 pagineForo 4.2 PDFGomer Guevara TitoNessuna valutazione finora
- Hidraulica de Tuberias 8 PDF FreeDocumento5 pagineHidraulica de Tuberias 8 PDF FreeFelipe RojasNessuna valutazione finora
- Manual de Usuario TE4Documento29 pagineManual de Usuario TE4Nicolas Pastine SepulvedaNessuna valutazione finora
- Modelo Matematico Maqueta PresionDocumento33 pagineModelo Matematico Maqueta PresionJorge MoralesNessuna valutazione finora
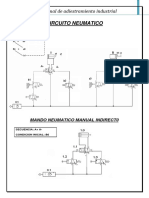
- Circuito Neumatico Mando Neumatico ManuaDocumento28 pagineCircuito Neumatico Mando Neumatico ManuaarelyNessuna valutazione finora
- Control 1Documento19 pagineControl 1GEOVANNY100% (1)
- Proyectos de AutomatizaciónDocumento5 pagineProyectos de Automatizaciónridam azmarNessuna valutazione finora
- Informe de La Sala de Bomba Mayorazgo 201778789Documento3 pagineInforme de La Sala de Bomba Mayorazgo 201778789IRWIN MERCADO QUISPENessuna valutazione finora
- 1 IntroduccionDocumento38 pagine1 IntroduccionGuillermo Crothers StevensNessuna valutazione finora
- Clase 8Documento50 pagineClase 8Katherine Morales aNessuna valutazione finora
- ADocumento11 pagineAFelipeAlfonsoMuñozMorenoNessuna valutazione finora
- Lógica Cableada: Módulo: TCL204 Docente: Sebastian Contretas Estudiante: Michael Torres InfanteDocumento7 pagineLógica Cableada: Módulo: TCL204 Docente: Sebastian Contretas Estudiante: Michael Torres InfanteMichael Torre'ss Infante100% (1)
- Guía 01Documento10 pagineGuía 01Diego MontesNessuna valutazione finora
- Tren de Levitacion ElectromagneticaDocumento7 pagineTren de Levitacion ElectromagneticaEmanuel Arcos CoronelNessuna valutazione finora
- Guia N°5 Álgebra 2 2013 IplacexDocumento9 pagineGuia N°5 Álgebra 2 2013 IplacexTracy GrahamNessuna valutazione finora
- Actividad Semana 2 PLC 1Documento6 pagineActividad Semana 2 PLC 1jorge dazaNessuna valutazione finora
- Fase 2 Sistemas Dinamicos Diego RestrepoDocumento14 pagineFase 2 Sistemas Dinamicos Diego RestrepoDiego Mauricio Restrepo SalazarNessuna valutazione finora
- Cartas DinamometricasDocumento90 pagineCartas DinamometricasGranados A. CarlosNessuna valutazione finora
- Factorial 2Documento82 pagineFactorial 2Roger Gabriel Fernandez HidalgoNessuna valutazione finora
- Flujo Cruzado PDFDocumento169 pagineFlujo Cruzado PDFdiegoNessuna valutazione finora
- Manual Curso Autoclave 2019Documento20 pagineManual Curso Autoclave 2019González LPatricia81% (16)
- Análisis Combinatorio Ii 09.02.07Documento5 pagineAnálisis Combinatorio Ii 09.02.07Edinsson R. Javier Villanueva67% (3)
- Parcial Corte 1 - 03 2021Documento2 pagineParcial Corte 1 - 03 2021Simon Daza JuradoNessuna valutazione finora
- Confor TermicoDocumento24 pagineConfor TermicoAnnikA HCNessuna valutazione finora
- Informe de Sifon FinalDocumento18 pagineInforme de Sifon Finalnataly_12_95Nessuna valutazione finora
- Analisis y Mediciones de BobinasDocumento9 pagineAnalisis y Mediciones de BobinasJhoan CorreaNessuna valutazione finora
- EHS Guidelines For Wind Energy - Dec2015-SpanishDocumento40 pagineEHS Guidelines For Wind Energy - Dec2015-SpanishIFC SustainabilityNessuna valutazione finora
- Cambios en El Ekg en El IamDocumento17 pagineCambios en El Ekg en El IamHector Alejo CervantesNessuna valutazione finora
- Actividad Unidad 3 FisicaDocumento4 pagineActividad Unidad 3 Fisicayorkis sanmartin50% (2)
- SincroDocumento12 pagineSincroYo Molo MazoNessuna valutazione finora
- Mi Laboratorio InfantilDocumento9 pagineMi Laboratorio InfantilFundaciòn Ambiental ProvidaNessuna valutazione finora
- TDR Inst ElectricasDocumento13 pagineTDR Inst Electricasjosé ramirez odarNessuna valutazione finora
- Mecánica CuánticaDocumento3 pagineMecánica Cuántica-XER00 GAMER-Nessuna valutazione finora
- Nivel Basico Ing. NavaDocumento97 pagineNivel Basico Ing. NavaMaria ReyesNessuna valutazione finora
- Ensayo - Ciclo Mecanico de RefrigeracionDocumento4 pagineEnsayo - Ciclo Mecanico de RefrigeracionChristian Eduardo Sanchez SandovalNessuna valutazione finora
- HidrostaticaDocumento24 pagineHidrostaticaratonblancoNessuna valutazione finora
- Ventajas y DesventajasDocumento21 pagineVentajas y DesventajasCiro AvNessuna valutazione finora
- Practicas Tiro ParabolicoDocumento3 paginePracticas Tiro ParabolicoFernanda GonzalezNessuna valutazione finora
- Tesis Suelos Parcialmente Saturados Natalia JimenezDocumento221 pagineTesis Suelos Parcialmente Saturados Natalia JimenezEdwin Diaz OrtizNessuna valutazione finora
- EIA y Plan Manejo Ambiental Sismica 3D Bloque31Documento468 pagineEIA y Plan Manejo Ambiental Sismica 3D Bloque31Ramon Diaz Tellez100% (3)
- Teorema de BayesDocumento4 pagineTeorema de BayesJuan SdNessuna valutazione finora
- Manual de HidráulicaDocumento67 pagineManual de HidráulicaLucia Dario LuluNessuna valutazione finora
- Econometría: Apuntes de Clase, Capítulo 1 (Gallego Gómez, J.)Documento10 pagineEconometría: Apuntes de Clase, Capítulo 1 (Gallego Gómez, J.)Gabriel MerloNessuna valutazione finora
- Informe de BrujulaDocumento18 pagineInforme de BrujulaDavid Pacuri Deza100% (1)
- Origen de La FotografíaDocumento12 pagineOrigen de La FotografíaEterna SpectrumNessuna valutazione finora
- Formato Por Temas - Unidad 2 - Tema 1 PDFDocumento8 pagineFormato Por Temas - Unidad 2 - Tema 1 PDFDarlin Nan-Sin Lin HenríquezNessuna valutazione finora
- Tarea Primer Parcial DinamicaDocumento23 pagineTarea Primer Parcial DinamicaDaniel GalindoNessuna valutazione finora