Potrebbero piacerti anche
- Cambio de Malla TrommelDocumento18 pagineCambio de Malla TrommelJamen Luis Quinonez BellidoNessuna valutazione finora
- Facultad de Ingenierias Química General Práctica de EstquiometriaDocumento4 pagineFacultad de Ingenierias Química General Práctica de EstquiometriaJamen Luis Quinonez BellidoNessuna valutazione finora
- Jonatan Merma Lozano 2024Documento16 pagineJonatan Merma Lozano 2024Jamen Luis Quinonez BellidoNessuna valutazione finora
- Semana 13Documento1 paginaSemana 13Jamen Luis Quinonez BellidoNessuna valutazione finora
- Facultad de IngenieriasDocumento4 pagineFacultad de IngenieriasJamen Luis Quinonez BellidoNessuna valutazione finora
- Captura de Pantalla 2021-05-29 A La(s) 06.12.13Documento13 pagineCaptura de Pantalla 2021-05-29 A La(s) 06.12.13Jamen Luis Quinonez BellidoNessuna valutazione finora
- S06.s1 Material de Clase (Resumen) 2021-AgostoDocumento4 pagineS06.s1 Material de Clase (Resumen) 2021-AgostoJamen Luis Quinonez BellidoNessuna valutazione finora
- 01 ReacionesRedoxDocumento4 pagine01 ReacionesRedoxJamen Luis Quinonez BellidoNessuna valutazione finora
- UTP Guia de Laboratorio 4 HITDDocumento5 pagineUTP Guia de Laboratorio 4 HITDJamen Luis Quinonez BellidoNessuna valutazione finora
- S03.s1 - Material - Rectas Paralelas y PerpendicularesDocumento23 pagineS03.s1 - Material - Rectas Paralelas y PerpendicularesJamen Luis Quinonez BellidoNessuna valutazione finora
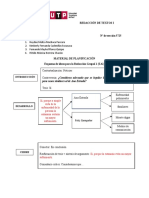
- S03.s2 - Esquema de Redacciòn Tarea Académica 1 (TA1) - 2021 AGOSTODocumento1 paginaS03.s2 - Esquema de Redacciòn Tarea Académica 1 (TA1) - 2021 AGOSTOJamen Luis Quinonez BellidoNessuna valutazione finora
- Maquina de Corriente Continua Como Motor en DerivaciónDocumento5 pagineMaquina de Corriente Continua Como Motor en DerivaciónWilson Francisco BritoNessuna valutazione finora
- Características Técnicas Que Debe Cumplir El Equipo de Cómputo Que Se Adquiera para El Uso Del Ministerio de HaciendaDocumento37 pagineCaracterísticas Técnicas Que Debe Cumplir El Equipo de Cómputo Que Se Adquiera para El Uso Del Ministerio de HaciendaJiàoshòu DiazNessuna valutazione finora
- Ergonomia 2 PDFDocumento28 pagineErgonomia 2 PDFAngel MartinezNessuna valutazione finora
- Guia Pistas de Hielo en EspañolDocumento108 pagineGuia Pistas de Hielo en EspañolNievesGraNessuna valutazione finora
- Perspectivas en Acuicultura (Nivel Mundial, Regional y Local)Documento99 paginePerspectivas en Acuicultura (Nivel Mundial, Regional y Local)Ing MEMBRANASNessuna valutazione finora
- Conociendo Tu EcosistemaDocumento12 pagineConociendo Tu EcosistemaKrla Fernanda Valdés SithNessuna valutazione finora
- Formulas WeibullDocumento31 pagineFormulas WeibullGonzalo SepulvedaNessuna valutazione finora
- Plantilla Tren CajaDocumento4 paginePlantilla Tren CajajuanNessuna valutazione finora
- Frecuencia de ProcesadorDocumento1 paginaFrecuencia de ProcesadorAnonymous uWMsOf8Nessuna valutazione finora
- Lab 2 Array - V2Documento6 pagineLab 2 Array - V2Alex ChuctayaNessuna valutazione finora
- Informe Final t3Documento209 pagineInforme Final t3rosa elvira abanto albarranNessuna valutazione finora
- Guía de Laboratorio Redes Opticas 02Documento9 pagineGuía de Laboratorio Redes Opticas 02MAX FREDI QUISPE AGUILARNessuna valutazione finora
- Bases Concurso Diseño y Planeamiento MinaDocumento7 pagineBases Concurso Diseño y Planeamiento MinaDenis HallasiNessuna valutazione finora
- Actividad 2 EconometriaDocumento4 pagineActividad 2 EconometriaHumbertoJimenezFloresNessuna valutazione finora
- TORTILLERÍA - LA YAQUESITA - Mayo 2011Documento21 pagineTORTILLERÍA - LA YAQUESITA - Mayo 2011Lyuz DíazNessuna valutazione finora
- Turbinas HidraulicasDocumento14 pagineTurbinas HidraulicasChristian Bryan100% (1)
- Fijación de La Tarifa Eléctrica para Sistemas Fotovoltaicos 2018Documento12 pagineFijación de La Tarifa Eléctrica para Sistemas Fotovoltaicos 2018Oscar Cueva CardeñaNessuna valutazione finora
- Integración de Sistemas de Gestión Mediante PAS 99 - 2012 - QueAprendemosHoyDocumento3 pagineIntegración de Sistemas de Gestión Mediante PAS 99 - 2012 - QueAprendemosHoyJuan Manuel Valdez Von FürthNessuna valutazione finora
- Manual Manual de Uso Termostato Digital ProgramableDocumento39 pagineManual Manual de Uso Termostato Digital Programable007jamesbondargNessuna valutazione finora
- Velocidad Del ObturadorDocumento5 pagineVelocidad Del ObturadorChris HANessuna valutazione finora
- Realizando Comparación Remota Entre Ambientes SAPDocumento7 pagineRealizando Comparación Remota Entre Ambientes SAPluislokox100% (1)
- Informe T. de Superposicion-Reciprocidad.Documento8 pagineInforme T. de Superposicion-Reciprocidad.Henry Rivas LauraNessuna valutazione finora
- 2100 sr007 - Es eDocumento30 pagine2100 sr007 - Es eWanessa SuárezNessuna valutazione finora
- Balotario ECOLOGIA APLICADADocumento7 pagineBalotario ECOLOGIA APLICADAfbrando110591Nessuna valutazione finora
- Trabajo de Recoleccion de Aguas ServidasDocumento34 pagineTrabajo de Recoleccion de Aguas ServidasBarinitas Calderas75% (4)
- Construccion II-cap Vii - Encofrados (r4)Documento151 pagineConstruccion II-cap Vii - Encofrados (r4)CONSTRUCCION275% (4)
- Cronograma Sanitarios GanttDocumento1 paginaCronograma Sanitarios GanttGuillermo Martin CHNessuna valutazione finora
- Sistemas Dinámicos en MatemáticasDocumento58 pagineSistemas Dinámicos en MatemáticasIsmael ValverdeNessuna valutazione finora
- Un Procesador Digital de Señales o DSPDocumento4 pagineUn Procesador Digital de Señales o DSPLucia TorresNessuna valutazione finora
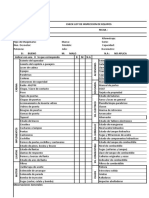
- Formato de Check ListDocumento4 pagineFormato de Check ListAmérico Hernández MendozaNessuna valutazione finora