Potrebbero piacerti anche
- Clock GateDocumento19 pagineClock Gateamma4manuNessuna valutazione finora
- Finding and Resolving Unconstrained EndpointsDocumento3 pagineFinding and Resolving Unconstrained EndpointsMayur Agarwal100% (5)
- Finding and Resolving Unconstrained EndpointsDocumento3 pagineFinding and Resolving Unconstrained EndpointsMayur Agarwal100% (5)
- Hierarchical Timing Analysis WPDocumento7 pagineHierarchical Timing Analysis WPvpsampathNessuna valutazione finora
- Implementation of Clock Network Based On Clock Mesh, Huang XuDocumento6 pagineImplementation of Clock Network Based On Clock Mesh, Huang Xusai charanNessuna valutazione finora
- Minimal buffer insertion in clock treesDocumento10 pagineMinimal buffer insertion in clock treessakruNessuna valutazione finora
- Timing Yield Estimation Using STTADocumento4 pagineTiming Yield Estimation Using STTARoshan UchilNessuna valutazione finora
- Clock Distribution Using VHDLDocumento66 pagineClock Distribution Using VHDLBridget GrahamNessuna valutazione finora
- Prediction Router: Yet Another Low Latency On-Chip Router ArchitectureDocumento12 paginePrediction Router: Yet Another Low Latency On-Chip Router ArchitectureChih Hsun ChouNessuna valutazione finora
- SOC Implementation Wave-Pipelined: VenkataramaniDocumento8 pagineSOC Implementation Wave-Pipelined: VenkataramaniRamesh PrasadNessuna valutazione finora
- Clock Skew Analysis and Static Timing Analysis FundamentalsDocumento4 pagineClock Skew Analysis and Static Timing Analysis Fundamentalsniranjanpujari25100% (1)
- Global Clock Synchronization Method Based On Highest Clock Divergence in MANETDocumento5 pagineGlobal Clock Synchronization Method Based On Highest Clock Divergence in MANETInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- Min-Max Timing Analysis and An Application To Asynchronous CircuitsDocumento13 pagineMin-Max Timing Analysis and An Application To Asynchronous CircuitsbigfatdashNessuna valutazione finora
- Adaptive Pipeline Depth Control For Processor Power ManagementDocumento4 pagineAdaptive Pipeline Depth Control For Processor Power ManagementPhuc HoangNessuna valutazione finora
- Variation Tolerant Clock Distribution Network For NomicroprocessorDocumento8 pagineVariation Tolerant Clock Distribution Network For NomicroprocessorKhadar BashaNessuna valutazione finora
- Elastic Systems: Fig. 1. (A) Non-Elastic Behavior, (B) Elastic BehaviorDocumento10 pagineElastic Systems: Fig. 1. (A) Non-Elastic Behavior, (B) Elastic BehaviorAna LavaNessuna valutazione finora
- ICCAD05 Long Links Final v5Documento8 pagineICCAD05 Long Links Final v5kamarajme2006Nessuna valutazione finora
- Virtual Channels Planning For Networks-on-Chip: Ting-Chun Huang, Umit Y. Ogras, Radu MarculescuDocumento6 pagineVirtual Channels Planning For Networks-on-Chip: Ting-Chun Huang, Umit Y. Ogras, Radu MarculescurezakourdyNessuna valutazione finora
- HARP Hard-Wired Routing Pattern FPGAsDocumento9 pagineHARP Hard-Wired Routing Pattern FPGAsmossaied2Nessuna valutazione finora
- Chapter IDocumento12 pagineChapter ISivakumar PothirajNessuna valutazione finora
- How To Solve Setup & Hold Violations in The Design: PowerDocumento20 pagineHow To Solve Setup & Hold Violations in The Design: PowerSujit Kumar100% (1)
- Abstract: Due To Significant Advances in Wireless Modulation Technologies, Some MAC Standards Such As 802.11aDocumento6 pagineAbstract: Due To Significant Advances in Wireless Modulation Technologies, Some MAC Standards Such As 802.11aVidvek InfoTechNessuna valutazione finora
- CDC by Ajaysimha - VlsiDocumento14 pagineCDC by Ajaysimha - VlsiPriyanka GollapallyNessuna valutazione finora
- PrimeTime AdvancedOCV WPDocumento9 paginePrimeTime AdvancedOCV WPPraful GaikwadNessuna valutazione finora
- Lowering Power Consumption in Clock by Using Globally Asynchronous Locally Synchronous Design StyleDocumento6 pagineLowering Power Consumption in Clock by Using Globally Asynchronous Locally Synchronous Design StyleSambhav VermanNessuna valutazione finora
- Low Power Clock Tree Synthesis Using Clustering AlgorithmDocumento5 pagineLow Power Clock Tree Synthesis Using Clustering AlgorithmNavaneeth KumarNessuna valutazione finora
- A Cross-Layer Framework For Overhead Reduction, Traffic Scheduling, and Burst Allocation in IEEE 802.16 OFDMA NetworksDocumento16 pagineA Cross-Layer Framework For Overhead Reduction, Traffic Scheduling, and Burst Allocation in IEEE 802.16 OFDMA NetworksSenthilkumarNessuna valutazione finora
- High-Performance Low-Power Carry Speculative Addition With Variable LatencyDocumento13 pagineHigh-Performance Low-Power Carry Speculative Addition With Variable LatencyPiyush ParasharNessuna valutazione finora
- Gps PDFDocumento14 pagineGps PDFAsk Bulls BearNessuna valutazione finora
- Optical Burst Switching (OBS)Documento27 pagineOptical Burst Switching (OBS)adityaNessuna valutazione finora
- Wireless Scheduling With Delayed CSI: WhenDocumento13 pagineWireless Scheduling With Delayed CSI: WhenCIRI CORPORATENessuna valutazione finora
- Optical Burst SwitchingDocumento14 pagineOptical Burst SwitchingImran HussainNessuna valutazione finora
- Parallel Self Timed AdderDocumento5 pagineParallel Self Timed AdderjayaprasadkalluriNessuna valutazione finora
- A Simulation Framework For Energy-Aware Wireless Sensor Network ProtocolsDocumento7 pagineA Simulation Framework For Energy-Aware Wireless Sensor Network ProtocolsNESEGANessuna valutazione finora
- Library Characterization Addressing Process Variation WP PDFDocumento5 pagineLibrary Characterization Addressing Process Variation WP PDFFeroz AhmedNessuna valutazione finora
- A_CMOS_PWM_Transceiver_Using_Self-Referenced_Edge_DetectionDocumento5 pagineA_CMOS_PWM_Transceiver_Using_Self-Referenced_Edge_Detectionkegonif419Nessuna valutazione finora
- Meshworks: An Efficient Framework For Planning, Synthesis and Optimization of Clock Mesh NetworksDocumento8 pagineMeshworks: An Efficient Framework For Planning, Synthesis and Optimization of Clock Mesh NetworksNavin DayaniNessuna valutazione finora
- A Comparative Study On Multisource Clock Network SynthesisDocumento5 pagineA Comparative Study On Multisource Clock Network SynthesisJayaNessuna valutazione finora
- Latch OptDocumento6 pagineLatch OptPavamana GiribhattanavarNessuna valutazione finora
- Power-Aware Placement: Yongseok Cheon, Pei-Hsin Ho, Andrew B. Kahng, Sherief Reda, Qinke WangDocumento6 paginePower-Aware Placement: Yongseok Cheon, Pei-Hsin Ho, Andrew B. Kahng, Sherief Reda, Qinke WangNadella SreedharNessuna valutazione finora
- 9 Report 1Documento66 pagine9 Report 1AbdulBasitKhanNessuna valutazione finora
- A 10-Gb/s CMOS Clock and Data Recovery Circuit With A Half-Rate Linear Phase DetectorDocumento8 pagineA 10-Gb/s CMOS Clock and Data Recovery Circuit With A Half-Rate Linear Phase DetectorMahima ArrawatiaNessuna valutazione finora
- An Efficient Clock Tree Synthesis Method in Physical Design: December 2009Documento5 pagineAn Efficient Clock Tree Synthesis Method in Physical Design: December 2009KavyashreeMNessuna valutazione finora
- Interview Questions PDFDocumento13 pagineInterview Questions PDFRA NDYNessuna valutazione finora
- (Team Unknown) : 6.2. Subsystem Design PrinciplesDocumento5 pagine(Team Unknown) : 6.2. Subsystem Design PrinciplesAnonymous qIID9U8yDFNessuna valutazione finora
- Blocking Probabilities of Optical Burst Switching Networks Based On Reduced Load Fixed Point ApproximationsDocumento11 pagineBlocking Probabilities of Optical Burst Switching Networks Based On Reduced Load Fixed Point Approximationshcdung18Nessuna valutazione finora
- Cell Cloning For Minimizing Critical Path DelayDocumento8 pagineCell Cloning For Minimizing Critical Path Delayearth v moonNessuna valutazione finora
- Robust Chip Level CTSDocumento14 pagineRobust Chip Level CTSkvpk_vlsi100% (1)
- Design of Clock Distribution Networks-Case StudyDocumento3 pagineDesign of Clock Distribution Networks-Case StudyPino Watson PisoloNessuna valutazione finora
- AMD Interview QuestionsDocumento4 pagineAMD Interview QuestionsRohit Somkuwar100% (1)
- Forwarder Set Based Dynamic Duty Cycling Prolongs WSN LifetimeDocumento6 pagineForwarder Set Based Dynamic Duty Cycling Prolongs WSN LifetimeSıla Özen GüçlüNessuna valutazione finora
- Computer Design Supervision 1Documento8 pagineComputer Design Supervision 1Tom PattersonNessuna valutazione finora
- UncertaintyDocumento24 pagineUncertaintyramana459Nessuna valutazione finora
- Statistical Spectra and Distortion Analysis of Time-Interleaved Sampling Bandwidth Mismatch - 2008Documento5 pagineStatistical Spectra and Distortion Analysis of Time-Interleaved Sampling Bandwidth Mismatch - 2008dienmaytainhagiareNessuna valutazione finora
- Path-Based Hardware Loop PredictionDocumento10 paginePath-Based Hardware Loop PredictionHemanth KalepalliNessuna valutazione finora
- Performance Evaluation of BeaconenabledDocumento13 paginePerformance Evaluation of BeaconenabledNgày Bình ThườngNessuna valutazione finora
- Clock Power OptimizationDocumento13 pagineClock Power OptimizationpankajmudgilNessuna valutazione finora
- Recursive Approach To The Design of A Parallel Self-Timed Adder PDFDocumento5 pagineRecursive Approach To The Design of A Parallel Self-Timed Adder PDFgestNessuna valutazione finora
- Logical and Physical Design Flow PerspectivesDocumento32 pagineLogical and Physical Design Flow Perspectivesskarrys5Nessuna valutazione finora
- On-Chip Implementation of High Resolution High Speed Low Area Floating Point AdderSubtractor With Reducing Mean Latency For OFDM ApplicationsDocumento6 pagineOn-Chip Implementation of High Resolution High Speed Low Area Floating Point AdderSubtractor With Reducing Mean Latency For OFDM ApplicationsDr. Rozita teymourzadeh, CEng.Nessuna valutazione finora
- Wi-Fi Capacity Analysis WP PDFDocumento21 pagineWi-Fi Capacity Analysis WP PDFkomalNessuna valutazione finora
- Cisco Spine LeafDocumento5 pagineCisco Spine LeafMasih FavaNessuna valutazione finora
- Variation-Aware Ch4aDocumento16 pagineVariation-Aware Ch4aSudheer GangisettyNessuna valutazione finora
- 14 - Searching and Sorting PDFDocumento18 pagine14 - Searching and Sorting PDFSudheer GangisettyNessuna valutazione finora
- Sed CheatsheetDocumento2 pagineSed CheatsheetShriram SwaminathanNessuna valutazione finora
- Fixing Max Cap and Max Tran ViolationsDocumento8 pagineFixing Max Cap and Max Tran Violationsvlsi_asic80% (5)
- Mirae Asset Emerging Bluechip Fund (MAEBF) : Product Update April 2019Documento2 pagineMirae Asset Emerging Bluechip Fund (MAEBF) : Product Update April 2019Sudheer GangisettyNessuna valutazione finora
- Sample UNIX Installation Directories: File DescriptionDocumento2 pagineSample UNIX Installation Directories: File DescriptionSudheer GangisettyNessuna valutazione finora
- File HandlingDocumento10 pagineFile HandlingSudheer GangisettyNessuna valutazione finora
- Today Testing Jobs PDFDocumento34 pagineToday Testing Jobs PDFSudheer GangisettyNessuna valutazione finora
- Excel Short Cuts Cheat Sheet by FunctionsDocumento5 pagineExcel Short Cuts Cheat Sheet by Functionsanon_491881087Nessuna valutazione finora
- 1 - Introduction To C Assignments PDFDocumento1 pagina1 - Introduction To C Assignments PDFSudheer GangisettyNessuna valutazione finora
- Engineer Trainee Recruitment at VEDA IIT for VLSI Digital & Analog EngineeringDocumento1 paginaEngineer Trainee Recruitment at VEDA IIT for VLSI Digital & Analog EngineeringSudheer GangisettyNessuna valutazione finora
- Sed Cheat SheetDocumento4 pagineSed Cheat Sheetsharad_ism007Nessuna valutazione finora
- Linux AWK Instruction Sheet English PDFDocumento2 pagineLinux AWK Instruction Sheet English PDFSudheer GangisettyNessuna valutazione finora
- Tempus Timing Signoff Solution Ds PDFDocumento3 pagineTempus Timing Signoff Solution Ds PDFSudheer Gangisetty0% (1)
- Engineer Trainee Recruitment at VEDA IIT for VLSI Digital & Analog EngineeringDocumento1 paginaEngineer Trainee Recruitment at VEDA IIT for VLSI Digital & Analog EngineeringSudheer GangisettyNessuna valutazione finora
- Sed CheatsheetDocumento2 pagineSed CheatsheetShriram SwaminathanNessuna valutazione finora
- 3cshells PDFDocumento36 pagine3cshells PDFSudheer GangisettyNessuna valutazione finora
- Perlbook Preview PDFDocumento14 paginePerlbook Preview PDFSudheer GangisettyNessuna valutazione finora
- Standard Parasitic Exchange Format (SPEF) Format: Kunal GhoshDocumento11 pagineStandard Parasitic Exchange Format (SPEF) Format: Kunal GhoshSudheer GangisettyNessuna valutazione finora
- RDL Process EquipmentDocumento4 pagineRDL Process EquipmentSrinivas KrishnaNessuna valutazione finora
- Tempus Timing Signoff Solution DsDocumento3 pagineTempus Timing Signoff Solution DsSudheer GangisettyNessuna valutazione finora
- Synopsys Class 2 5 1Documento67 pagineSynopsys Class 2 5 1prashanth kumarNessuna valutazione finora
- 2ETM (Extracted Timing Models) - More Detail - VLSI ConceptsDocumento2 pagine2ETM (Extracted Timing Models) - More Detail - VLSI ConceptsSudheer GangisettyNessuna valutazione finora
- Engineer Trainee Recruitment at VEDA IIT for VLSI Digital & Analog EngineeringDocumento1 paginaEngineer Trainee Recruitment at VEDA IIT for VLSI Digital & Analog EngineeringSudheer GangisettyNessuna valutazione finora
- FloorplanningDocumento6 pagineFloorplanningSudheer GangisettyNessuna valutazione finora
- 1ETM (Extracted Timing Models) Basics - VLSI ConceptsDocumento3 pagine1ETM (Extracted Timing Models) Basics - VLSI ConceptsSudheer Gangisetty0% (1)
- Question Bank Me2401Documento13 pagineQuestion Bank Me2401Anonymous p8bHAAxNessuna valutazione finora
- FYP Project 2jkmkDocumento24 pagineFYP Project 2jkmkMarjanNessuna valutazione finora
- Install Carbon Monoxide Sensor CMS MQ-7 SERIESDocumento3 pagineInstall Carbon Monoxide Sensor CMS MQ-7 SERIESMarchena Segil ErikNessuna valutazione finora
- Service Bulletin Buses: Electronically Controlled Air SuspensionDocumento22 pagineService Bulletin Buses: Electronically Controlled Air Suspensionalberto torresNessuna valutazione finora
- Microcontrollers - Chapter 02Documento20 pagineMicrocontrollers - Chapter 02Mohammad K RadwanNessuna valutazione finora
- E-Wallet: Paper Presentation OnDocumento7 pagineE-Wallet: Paper Presentation OnSiddhartha Choudary100% (1)
- Hanwha Q Cells Data Sheet Qplus L g4.1 330-340 2016-09 Rev02 enDocumento2 pagineHanwha Q Cells Data Sheet Qplus L g4.1 330-340 2016-09 Rev02 enManoj ShahNessuna valutazione finora
- Circuit BreakersDocumento64 pagineCircuit BreakersPhani Kumar100% (1)
- Concepts of Feedback and Instrumentation SystemDocumento11 pagineConcepts of Feedback and Instrumentation SystemMc Kevin Jade MadambaNessuna valutazione finora
- Design and Techno-Economical Optimization For Hybrid PV-wind System Under Various Meteorological ConditionsDocumento20 pagineDesign and Techno-Economical Optimization For Hybrid PV-wind System Under Various Meteorological Conditionsjun005Nessuna valutazione finora
- 3GPP TS 36.101: Technical SpecificationDocumento223 pagine3GPP TS 36.101: Technical SpecificationsomberriNessuna valutazione finora
- CEPT Novice 1Documento26 pagineCEPT Novice 1Ster RncNessuna valutazione finora
- Nirs DS2500 Analyzer: ManualDocumento54 pagineNirs DS2500 Analyzer: Manualedward tagarinoNessuna valutazione finora
- Detail of Maximum Current - ChillersDocumento3 pagineDetail of Maximum Current - ChillersMohamed RifanNessuna valutazione finora
- 1 2 7 Ak Understandingdigitaldesign RNGDocumento5 pagine1 2 7 Ak Understandingdigitaldesign RNGapi-290804719Nessuna valutazione finora
- Interference Cancellation System Design Using GNU Radio: by Jan Paolo AcostaDocumento24 pagineInterference Cancellation System Design Using GNU Radio: by Jan Paolo AcostaartovolastiNessuna valutazione finora
- 3ADW000163R0201 - Technical Guide - e - B PDFDocumento28 pagine3ADW000163R0201 - Technical Guide - e - B PDFAhmed MoustafaNessuna valutazione finora
- 3-3. Block Diagram: KDL-26M3000/26ML130/32M3000/32ML130Documento24 pagine3-3. Block Diagram: KDL-26M3000/26ML130/32M3000/32ML130antonio diazNessuna valutazione finora
- Ground Check Monitors For Underground Power SystemsDocumento8 pagineGround Check Monitors For Underground Power SystemsjorgeayreNessuna valutazione finora
- Description General Specifications: Photoswitch Photoelectric SensorsDocumento8 pagineDescription General Specifications: Photoswitch Photoelectric Sensorsmekhman mekhtyNessuna valutazione finora
- DRX and RSSIDocumento12 pagineDRX and RSSIMohammad SoleimaniNessuna valutazione finora
- Radio Design Live Products Combiners and TMAsDocumento1 paginaRadio Design Live Products Combiners and TMAsZiggy SmithNessuna valutazione finora
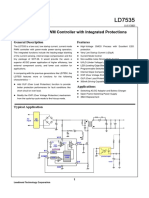
- Green-Mode PWM Controller With Integrated Protections: General Description FeaturesDocumento18 pagineGreen-Mode PWM Controller With Integrated Protections: General Description FeaturesRUSLANNessuna valutazione finora
- Properties Of Nλ/2 LinesDocumento12 pagineProperties Of Nλ/2 LinesJunar JohnNessuna valutazione finora
- Installation, Operation & Maintenance Instructions For Abtech S' Range Enclosures Cml15Atex3078U and Iecex CML 15.0039UDocumento2 pagineInstallation, Operation & Maintenance Instructions For Abtech S' Range Enclosures Cml15Atex3078U and Iecex CML 15.0039USantoshkumar GurmeNessuna valutazione finora
- Monopole & Dipole Antennas LabDocumento8 pagineMonopole & Dipole Antennas LabSharjeel AsifNessuna valutazione finora
- ED - Mid Lecture-10 - Part 2Documento12 pagineED - Mid Lecture-10 - Part 2Pritam ChakrabortyNessuna valutazione finora
- VLSI Quiz QuestionsDocumento17 pagineVLSI Quiz Questionsjitu_40% (1)
- Pid Controller Tuning in SimulinkDocumento7 paginePid Controller Tuning in SimulinkRicael SpirandeliNessuna valutazione finora
- Zener Diode and Diode ApplicationDocumento51 pagineZener Diode and Diode Applicationnibar dyllanNessuna valutazione finora