Plasticity in ADINA Structures
Theodore Sussman, Ph.D.
© ADINA R&D, Inc, 2016 1
Overview
• Review of hardening rules and material models.
• Kinematic formulations:
– small displacements, small strains (MNO)
– large displacement, small strains
– large displacement, large strains
• Incompressibility and the u/p formulation.
• “Type 2” plasticity algorithm.
• Transition from loading to unloading conditions.
• Some remarks on large strain bending.
© ADINA R&D, Inc, 2016 2
Hardening rules
© ADINA R&D, Inc, 2016 3
Generalization to multiaxial conditions
Uniaxial Uniaxial stress - Effective stress -
stress-strain plastic strain accumulated effective
curve curve plastic strain curve
© ADINA R&D, Inc, 2016 4
Plasticity material models
• Bilinear plasticity material model:
- MATERIAL PLASTIC-BILINEAR ... E=... YIELD=... ET=...,
HARDENING={ISOTROPIC or KINEMATIC}
• Multilinear plasticity material model:
- MATERIAL PLASTIC-MULTILINEAR ... E=...,
HARDENING={ISOTROPIC or KINEMATIC}
strain1 stress1
strain2 stress2
...
© ADINA R&D, Inc, 2016 5
Input option MASTER EXTEND-SSCURVE
• MASTER EXTEND-SSCURVE=NO
- The multilinear stress-strain curve is not extended. If the accumulated
effective plastic strain exceeds the largest input strain, the material
ruptures.
- MASTER EXTEND-SSCURVE=YES (the default)
- The multilinear stress-strain curve is extended, using the slope given by the
last two points in the curve.
- The amount of extension is effectively infinite, thus the material cannot
rupture.
© ADINA R&D, Inc, 2016 6
Cyclic plasticity model
• Model includes
- combined isotropic and kinematic hardening
- nonlinear kinematic hardening
• Example of input
PLCYCL-ISOTROPIC BILINEAR 1 YIELD=... EP=...
PLCYCL-KINEMATIC ARMSTRONG-FREDRICK 1
h1 zeta1
h2 zeta2
MATERIAL PLASTIC-CYCLIC ... E=...,
PLCYCL-ISOTROPIC=1 PLCYCL-KINEMATIC=1
• Model is able to reproduce complex cyclic plastic phenomena.
© ADINA R&D, Inc, 2016 7
Response to uniaxial cyclic loads
• Consider uniaxial cycling of a bar.
Stress-strain curve,
Prescribed strain perfect plasticity
© ADINA R&D, Inc, 2016 8
Bilinear isotropic hardening Bilinear kinematic hardening
Multilinear isotropic hardening Multilinear kinematic hardening
© ADINA R&D, Inc, 2016 9
Nonlinear kinematic hardening (cyclic plasticity model)
© ADINA R&D, Inc, 2016 10
Ratchetting
Prescribed stress, nonsymmetric
Stress-strain curve
Strain time history
© ADINA R&D, Inc, 2016 11
Example – shear link
• Shear link used in seismic energy dissipation system for bridges.
© ADINA R&D, Inc, 2016 12
• Stress-strain data for Grade-345 steel
Experimental data Cyclic plasticity model
Exponential isotropic hardening (3 material constants)
Armstrong-Fredrick kinematic hardening with two terms (4 material constants)
© ADINA R&D, Inc, 2016 13
© ADINA R&D, Inc, 2016 14
Kinematic formulations for plasticity
• Small displacement / small strain.
- Materially nonlinear only (MNO)
- Strain = small strain, stress = Cauchy (true) stress
- Input stress-strain curve assumes small strains and Cauchy stresses
- Program output is small strains and Cauchy stresses
• Large displacement / small strain
- Strain = Green-Lagrange strain, stress = 2nd Piola-Kirchhoff stress
- Input stress-strain curve assumes Green-Lagrange strains and 2nd Piola-
Kirchhoff stresses. Under small strain conditions, the Green-Lagrange
strains are numerically close to small strains, and the 2nd Piola-Kirchhoff
stresses are numerically close to Cauchy stresses.
- Program output is Green-Lagrange strains and Cauchy stresses
© ADINA R&D, Inc, 2016 15
Kinematic formulations for plasticity
• Large displacement / large strain using the ULJ formulation
- Strain = Jaumann strain, stress = Cauchy stress
- Input stress-strain curve assumes log strains and Cauchy stresses (but see
note below)
- Strain output depends on the material model:
- MATERIAL PLASTIC-BILINEAR or PLASTIC-MULTILINEAR
- Strain output is stretches or deformation gradients
- MATERIAL PLASTIC-CYCLIC
- Strain output is Jaumann strains
- Stress output is Cauchy stresses.
• If MASTER CONVERT-SSVAL=YES, then the input stress-strain curve
assumes engineering strains and engineering stresses (not applicable for
MATERIAL PLASTIC-CYCLIC).
© ADINA R&D, Inc, 2016 16
Kinematic formulations for plasticity
• Large displacement / large strain using the ULH formulation
- Strain = right or left Hencky strain, stress = rotated or unrotated Cauchy
stress (depends on the type of element).
- Input stress-strain curve assumes log strains and Cauchy stresses
(MASTER CONVERT-SSVAL can also be used, as in ULJ)
- Strain output depends on the material model,
- MATERIAL PLASTIC-BILINEAR or PLASTIC-MULTILINEAR
- Strain output is stretches or deformation gradients
- MATERIAL PLASTIC-CYCLIC
- Strain output is left Hencky strain
- Stress output is Cauchy stresses.
© ADINA R&D, Inc, 2016 17
Input stresses and strains for large strain formulations
• For input:
- True stress = force / unit area F / A
t t
- Engineering stress = force / unit undeformed area t F / 0 A
- True strain = ln t L / 0 L
- Engineering strain = ( t L / 0 L) 1
• Assuming incompressibility,
t
- True stress = engineering stress times L / 0L
© ADINA R&D, Inc, 2016 18
ULH vs ULJ
• ULH
- Rigid-body rotations are mathematically removed, so the material can
undergo an arbitrarily large rigid body rotation in one time step.
- The material can undergo a very large proportional loading within a single
time step.
- Calculation of Hencky strains is relatively expensive.
• ULJ
- The Jaumann strain approximates the (left) Hencky strain.
- There is an error when the material undergoes a rigid body rotation, but the
error becomes small as the amount of rotation per time step is reduced.
- There is an error when the material undergoes a large proportional loading,
but this error becomes small as the amount of loading per time step is
reduced.
- Calculation of Jaumann strains is relatively inexpensive.
© ADINA R&D, Inc, 2016 19
Comparison of kinematic formulations
• Single plane stress element under uniaxial tension
Input stress-strain curve
© ADINA R&D, Inc, 2016 20
Comparison of kinematic formulations
Input stress-strain curve
© ADINA R&D, Inc, 2016 21
Comparison of kinematic formulations
• Plasticity is characterized by a soft stress-strain response combined with
relatively large stresses. This combination causes the different kinematic
formulations to give different force-displacement curves.
• Large displacement / small strain
- Program output of Cauchy stresses can cause confusion, when comparing
computed response to expected response (program internally uses 2nd
Piola-Kirchhoff stresses).
• Large displacement / large strain
- The large displacement / large strain formulation (either ULH or ULJ)
should be used whenever geometric nonlinearities are present.
- The differences between ULH and ULJ are usually negligible in practical
analysis.
© ADINA R&D, Inc, 2016 22
u/p formulation for plasticity
• The elements that are undergoing plasticity “lock” in volumetric motion. Only
those motions for which the volumetric strain is zero at each integration point
are allowed.
• The pressures have a large variation within each element.
• The effective stresses are not directly affected, since the effective stress does not
include the pressure.
• The overall response is too stiff.
• The above effects are most pronounced for coarse meshes.
© ADINA R&D, Inc, 2016 23
Indenting of a half-space by a rigid punch
© ADINA R&D, Inc, 2016 24
Effective stress
Displacement-based u/p
© ADINA R&D, Inc, 2016 25
Pressure
Displacement-based u/p
© ADINA R&D, Inc, 2016 26
Accumulated effective plastic strain
Displacement-based u/p
© ADINA R&D, Inc, 2016 27
u/p formulation
• It is because of the u/p formulation that we recommend the use of 9-node
elements in 2D. The 8-node element (with three pressure degrees of freedom)
has some volumetric locking.
• Similarly, it is because of the u/p formulation that we recommend the use of the
11-node tet and 27-node brick element in 3D. The 10-node tet and 20-node brick
have some volumetric locking.
• On the other hand, higher-order elements can cause difficulties especially under
contact conditions. The u/p formulation can also be used with the lower-order
elements:
- 4-node element with constant pressure in 2D: 4/1 element
- 8-node element with constant pressure in 3D: 8/1 element
© ADINA R&D, Inc, 2016 28
“Type 2” plastic algorithm
• Normally, plasticity is determined directly from the yield stress:
- Effective stress smaller than yield stress material is elastic
- Effective stress larger than yield stress material is plastic, update plastic
strain so that the effective stress matches the yield stress.
• This “intuitive” algorithm is used for the “type 1” plastic algorithm.
• In the “type 2” plastic algorithm, we sometimes allow the effective stress to be
larger than the yield stress during the equilibrium iterations (but not for the
converged solution.)
• The “type 2” algorithm is useful when there are geometric nonlinearities along
with the nonlinearity due to plasticity.
© ADINA R&D, Inc, 2016 29
Motivating example
• In iteration 1, the tip node moves vertically upwards. The whole beam elongates
slightly (2nd order effect) and there is a corresponding membrane strain.
• In the expected solution, the tip node moves horizontally to the left, so that the
beam has no net change in length (consistent with no axial force applied to the
beam), and there is no membrane strain.
• If the beam uses an elastic-plastic material, it may be that in the expected
solution, the strains are small enough so that the beam is elastic, but that the
membrane strains of iteration 1 are large enough so that the beam is plastic. In
this case, the model cannot converge, because the incremental stiffness is based
on plastic conditions.
© ADINA R&D, Inc, 2016 30
Remedy – “type 2” plasticity algorithm
• The geometric error in a geometrically nonlinear solution can interact with the
plasticity algorithm, in such a way as to cause the solution to diverge.
• As a remedy, the “type 2” plasticity algorithm delays the onset of plasticity for
one equilibrium iteration:
• If the material is elastic, and the effective stress exceeds the yield stress,
the material goes into the “elastic yielded” state.
• If the material is in the “elastic yielded” state, and the effective stress is
smaller than the yield stress, the material returns to the elastic state.
• If the material is in the “elastic yielded” state, and the effective stress is
larger than the yield stress, the material becomes plastic.
• The convergence check includes a check on the elastic yielding states: If any
integration point is in the “elastic yielded” state, the solution is not converged.
© ADINA R&D, Inc, 2016 31
Remedy – “type 2” plasticity algorithm
• The type 2 plasticity algorithm is only implemented for large displacement /
large strain formulations.
• The type 2 plasticity can also slow down convergence for certain problems. For
example, if the beam were loaded by an axial force, convergence would be
slower.
- Iteration 1, tip displacement determined as if beam is elastic, membrane
strain is large enough so that beam is plastic, however beam goes into
“elastic yielded” state instead.
- Iteration 2, tip displacement determined based on elastic yielded beam,
membrane strain does not increase.
- Iteration 3, tip displacement determined based on plastic beam, membrane
strain increases.
© ADINA R&D, Inc, 2016 32
Transition from loading to unloading conditions
• When the material is plastic, the corresponding stiffness matrix corresponds to
plastic conditions. This is the situation during loading.
• If unloading begins, the material must eventually become elastic, with a stiffness
matrix corresponding to elastic conditions.
• The transition from loading to
unloading must be done using a
small time step size. This is because
the response to the change in load, in
the first equilibrium iteration,
assumes plastic conditions.
• Once unloading is established, the
time step size can be increased.
© ADINA R&D, Inc, 2016 33
Remarks on large strain bending
• Under large strain bending conditions, the neutral axis can shift. This
causes additional difficulties in obtaining accurate solutions.
• The 3D-shell element was developed, in part, in order to solve large
strain bending problems using shell elements. Although better than the
ordinary shell elements in large strain bending, when the deformations
become very large, these elements also give inaccurate solutions.
• The next few slides describe a “simple” large strain bending problem,
and present some approximate solutions.
• Actual large strain bending problems can be expected to be even more
difficult to solve.
© ADINA R&D, Inc, 2016 34
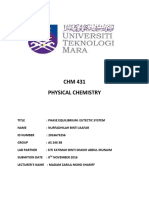
Plane strain bending of a rigid perfectly-plastic block
2 1
e /2 e /2 Material properties:
1 E = 1010
= 0.4999
e /2 3 4 e /2
y = 105
Le
Shell thickness a = 1
35000
30000
25000
Various
20000 results from
Moment
Le/a=2
15000
the 3D-shell
Le/a=1
element
10000 Le/a=1/2
Le/a=1/4
5000
Analytical solution
0
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0
Normalized curvature
© ADINA R&D, Inc, 2016 35
Plane strain bending of a rigid perfectly-plastic block
–Le/a = 1/2, normalized curvature = 2
© ADINA R&D, Inc, 2016 36
Plane strain bending of a rigid perfectly-plastic block
• What kind of FE mesh can give an accurate solution to this problem?
• Try a 2D solid mesh:
– The mesh can be refined in the vertical direction
© ADINA R&D, Inc, 2016 37
Plane strain bending of a rigid perfectly-plastic block
• For a coarse mesh of 3D-shell elements, the assemblage is too stiff.
• As a mesh of 3D-shell elements is refined, the assemblage becomes too soft.
The refinement corresponds to elements with length/thickness < 1.
• A 2D solid mesh can accurately solve the problem, but the number of
elements needed in the thickness direction is large. As the curvature for
which an accurate solution is required increases, the number of elements
needed in the thickness direction also increases.
• The same holds for a mesh of 3D solid elements.
© ADINA R&D, Inc, 2016 38
Plane strain bending of a rigid perfectly-plastic block
• The neutral axis is no longer halfway between the top and bottom of the
block.
• A material fiber above the original neutral axis always is in tension.
• A material fiber below the original neutral axis starts in compression, but
then as the neutral axis moves, this material fiber returns to tension.
© ADINA R&D, Inc, 2016 39
Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- 7 Non Linear Modeling With ADINADocumento43 pagine7 Non Linear Modeling With ADINAAdolfo Gálvez VillacortaNessuna valutazione finora
- Plastic FormingDocumento11 paginePlastic FormingAngeloLorenzoSalvadorTamayoNessuna valutazione finora
- Insulated Pipe - Temperature Loss CalculationDocumento5 pagineInsulated Pipe - Temperature Loss CalculationnopNessuna valutazione finora
- 3 - SWCC Specification M02 Polyethylene Coating Rev0Documento30 pagine3 - SWCC Specification M02 Polyethylene Coating Rev0EngineerSajidAlam100% (1)
- 5 SolidandshellelementsDocumento55 pagine5 SolidandshellelementsSahithyananda Shashidhar100% (1)
- Finite Element Modelling Structural Concrete - KotsovosDocumento189 pagineFinite Element Modelling Structural Concrete - KotsovosAdolfo Gálvez Villacorta100% (2)
- 2 - Introduction To FEADocumento44 pagine2 - Introduction To FEAAdolfo Gálvez VillacortaNessuna valutazione finora
- Dictionar Tehnic General / General Technical Dictionary: Romana/RomanianDocumento62 pagineDictionar Tehnic General / General Technical Dictionary: Romana/RomanianAma81100% (17)
- Exp 6 Phase Equilibrium Eutectic SystemDocumento6 pagineExp 6 Phase Equilibrium Eutectic SystemNur Fadhilah33% (3)
- Rots - Computational Modelling of Masonry With A View To Groningen Induced SeismicityDocumento12 pagineRots - Computational Modelling of Masonry With A View To Groningen Induced SeismicityAdolfo Gálvez Villacorta100% (2)
- Borah - 2020 - Finite Element Modelling of Confined Masonry Wall Under Cyclic LoadDocumento8 pagineBorah - 2020 - Finite Element Modelling of Confined Masonry Wall Under Cyclic LoadAdolfo Gálvez VillacortaNessuna valutazione finora
- Assessment of The Applicability of Nonlinear Drucker-Prager Model With Cap To AdobeDocumento10 pagineAssessment of The Applicability of Nonlinear Drucker-Prager Model With Cap To AdobeBishwajyoti Dutta MajumdarNessuna valutazione finora
- Impact Analysis Using ADINA: Daniel Jose Payen, PH.DDocumento34 pagineImpact Analysis Using ADINA: Daniel Jose Payen, PH.DAdolfo Gálvez VillacortaNessuna valutazione finora
- Resumo PDFDocumento11 pagineResumo PDFRelu MititeluNessuna valutazione finora
- Mixed Mode Crack Propagation in ConcreteDocumento45 pagineMixed Mode Crack Propagation in ConcreteAdolfo Gálvez VillacortaNessuna valutazione finora
- Adina Crack 2 PDFDocumento50 pagineAdina Crack 2 PDFAdolfo Gálvez VillacortaNessuna valutazione finora
- Concrete Model in AdinaDocumento28 pagineConcrete Model in AdinaAdolfo Gálvez VillacortaNessuna valutazione finora
- Impact Analysis Using ADINA: Daniel Jose Payen, PH.DDocumento34 pagineImpact Analysis Using ADINA: Daniel Jose Payen, PH.DAdolfo Gálvez VillacortaNessuna valutazione finora
- Reinforcement Modeling in Nonlinear Analysis of RC and RCHS Columns Subjected to Axial CompressionDocumento6 pagineReinforcement Modeling in Nonlinear Analysis of RC and RCHS Columns Subjected to Axial CompressionAdolfo Gálvez VillacortaNessuna valutazione finora
- Adina Model For Silo PDFDocumento15 pagineAdina Model For Silo PDFAdolfo Gálvez VillacortaNessuna valutazione finora
- ADINA Blast Simulation PDFDocumento6 pagineADINA Blast Simulation PDFAdolfo Gálvez VillacortaNessuna valutazione finora
- 16 RollingcontactDocumento27 pagine16 RollingcontactAdolfo Gálvez VillacortaNessuna valutazione finora
- ADINA Dynamic Analysis: Lay Tan Adina R & D 2016-03-09Documento18 pagineADINA Dynamic Analysis: Lay Tan Adina R & D 2016-03-09Adolfo Gálvez VillacortaNessuna valutazione finora
- Fracture Analysis With ADINA: Theodore Sussman, PH.DDocumento41 pagineFracture Analysis With ADINA: Theodore Sussman, PH.DAdolfo Galvez VillacortaNessuna valutazione finora
- 11 MeshglueingDocumento43 pagine11 MeshglueingAdolfo Gálvez VillacortaNessuna valutazione finora
- 3 GeometrydefinitionDocumento48 pagine3 GeometrydefinitionAdolfo Gálvez VillacortaNessuna valutazione finora
- 15 BergstromDocumento40 pagine15 BergstromAdolfo Gálvez VillacortaNessuna valutazione finora
- Contact Analysis - Theory and Concepts: Theodore Sussman, PH.DDocumento47 pagineContact Analysis - Theory and Concepts: Theodore Sussman, PH.DAdolfo Gálvez VillacortaNessuna valutazione finora
- 9 ContactmodelingDocumento56 pagine9 Contactmodelinganirudh666Nessuna valutazione finora
- 10 SolversDocumento23 pagine10 SolversAdolfo Gálvez VillacortaNessuna valutazione finora
- 6 Nonlinear TheoryDocumento54 pagine6 Nonlinear TheoryAdolfo Gálvez VillacortaNessuna valutazione finora
- FELIX BARDA PHD Dissertation: SHEAR STRENGTH OF LOW RISE WALLS WITH BOUNDARY ELEMENTSDocumento278 pagineFELIX BARDA PHD Dissertation: SHEAR STRENGTH OF LOW RISE WALLS WITH BOUNDARY ELEMENTSAdolfo Gálvez VillacortaNessuna valutazione finora
- Meshing in The ADINA User Interface (AUI) Daniel Jose Payen, PH.DDocumento34 pagineMeshing in The ADINA User Interface (AUI) Daniel Jose Payen, PH.DAdolfo Gálvez Villacorta100% (1)
- Overview of The ADINA System: Daniel Jose Payen, PH.DDocumento33 pagineOverview of The ADINA System: Daniel Jose Payen, PH.DAdolfo Gálvez VillacortaNessuna valutazione finora
- Cera Crystalline IntegralDocumento2 pagineCera Crystalline IntegralR.ThangarajNessuna valutazione finora
- Leaflet SPM and SOPDocumento4 pagineLeaflet SPM and SOPAbdullah Al-ZahraniNessuna valutazione finora
- Conductors and InsulatorsDocumento7 pagineConductors and InsulatorsAzsrul AzrulNessuna valutazione finora
- Lateral-Torsional Buckling of Orthotropic Rectangular Section BeamsDocumento8 pagineLateral-Torsional Buckling of Orthotropic Rectangular Section BeamsMina AdlyNessuna valutazione finora
- Slab On Grade EN PDFDocumento12 pagineSlab On Grade EN PDFSanja RadovicNessuna valutazione finora
- Clark1984 PDFDocumento29 pagineClark1984 PDFMiguel HerreraNessuna valutazione finora
- Fundamentals of Momentum, Heat and Mass TransferDocumento87 pagineFundamentals of Momentum, Heat and Mass TransferSlim KanounNessuna valutazione finora
- Masterseal 380 TDSDocumento2 pagineMasterseal 380 TDSArasu DonNessuna valutazione finora
- 1ST Law of ThermodynamicsDocumento7 pagine1ST Law of ThermodynamicsKen BorjaNessuna valutazione finora
- ZINCALUME Steel Technical Bulletins V14.0Documento31 pagineZINCALUME Steel Technical Bulletins V14.0beck.26Nessuna valutazione finora
- Chapter 5 HeatsinkDocumento6 pagineChapter 5 HeatsinkRazman RamedanNessuna valutazione finora
- Chapter2 Di Pa TaposDocumento13 pagineChapter2 Di Pa TaposDianne VillanuevaNessuna valutazione finora
- Steel Manufacturing Pollution Impacts Da Hoi VillageDocumento24 pagineSteel Manufacturing Pollution Impacts Da Hoi VillageThuận Nguyễn HữuNessuna valutazione finora
- Eccentric Footing Design Based On ACI 318-05: Input Data Design SummaryDocumento3 pagineEccentric Footing Design Based On ACI 318-05: Input Data Design SummaryWillian Delgado MendozaNessuna valutazione finora
- R.C.C Beam Design GuideDocumento20 pagineR.C.C Beam Design Guidebishal dasNessuna valutazione finora
- MSDS of Methyl PalmitateDocumento8 pagineMSDS of Methyl PalmitateAmm MarakataNessuna valutazione finora
- Materials Today: Proceedings: Jamal Eddine Hamoutami, Oum El Khaiat MoustachiDocumento9 pagineMaterials Today: Proceedings: Jamal Eddine Hamoutami, Oum El Khaiat MoustachiAli petekNessuna valutazione finora
- Bluestone Paving Technical SpecificationDocumento28 pagineBluestone Paving Technical SpecificationrohansahniNessuna valutazione finora
- Depithers For Efficient Preparation of Sugar Cane Bagasse Fibers in Pulp and Paper IndustryDocumento8 pagineDepithers For Efficient Preparation of Sugar Cane Bagasse Fibers in Pulp and Paper IndustryAlphonse SambranoNessuna valutazione finora
- Use of SBEDS For Blast Resistant Design in Accordance With UFC 3 340 02Documento38 pagineUse of SBEDS For Blast Resistant Design in Accordance With UFC 3 340 02wokeoooNessuna valutazione finora
- Che1015 Petrochemical-Technology TH 1.0 37 Che1015 55 AcpDocumento2 pagineChe1015 Petrochemical-Technology TH 1.0 37 Che1015 55 AcpAGSI FAFNessuna valutazione finora
- Activities Carried Out in Quality Control LaboratoryDocumento61 pagineActivities Carried Out in Quality Control LaboratorySunil SingireddyNessuna valutazione finora
- Dektite Diverter and Retrofit Dektite Diverter: Pipe FlashingsDocumento2 pagineDektite Diverter and Retrofit Dektite Diverter: Pipe FlashingscherandinhoNessuna valutazione finora
- Outokumpu Stainless Steel For Automotive IndustryDocumento20 pagineOutokumpu Stainless Steel For Automotive IndustrychristopherNessuna valutazione finora
- Umc Technical SpecsDocumento3 pagineUmc Technical SpecsMunir AhmadNessuna valutazione finora