Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Earths Rotation and RevolutionDocumento9 pagineEarths Rotation and RevolutionMarbeth Cunanan FariñasNessuna valutazione finora
- 11th Physics Full Book MCQs PDFDocumento34 pagine11th Physics Full Book MCQs PDFWaqas Rajpoot100% (1)
- BUOYANCY & FLOTATION - METACENTRIC HEIGHT ReportDocumento8 pagineBUOYANCY & FLOTATION - METACENTRIC HEIGHT Reportميسرة94% (18)
- SN002a (NCCi - Determination of Non-Dimensional Slenderness of I and H Sections)Documento11 pagineSN002a (NCCi - Determination of Non-Dimensional Slenderness of I and H Sections)Hamati RamiNessuna valutazione finora
- UiTM TMC401 201905Documento4 pagineUiTM TMC401 201905Eden HazardNessuna valutazione finora
- TimeDocumento17 pagineTimeEden HazardNessuna valutazione finora
- 5.transverse ShearDocumento15 pagine5.transverse ShearEden HazardNessuna valutazione finora
- Chapter 4 Transverse ShearDocumento39 pagineChapter 4 Transverse ShearEden HazardNessuna valutazione finora
- Test1 November 2018Documento4 pagineTest1 November 2018Eden HazardNessuna valutazione finora
- For A Free Falling Body of Mass MDocumento2 pagineFor A Free Falling Body of Mass MEden HazardNessuna valutazione finora
- V (Tñàxü J V (Tñàxü J: StrainDocumento19 pagineV (Tñàxü J V (Tñàxü J: StrainEden HazardNessuna valutazione finora
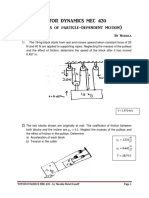
- Tutor 4 Dependent MotionDocumento4 pagineTutor 4 Dependent MotionEden HazardNessuna valutazione finora
- Three Phse SycronizeDocumento14 pagineThree Phse SycronizeEden HazardNessuna valutazione finora
- Cloth Folding MachineDocumento44 pagineCloth Folding MachineEden Hazard100% (1)
- ENT300 Presentation by Harith Khalid On PreziDocumento8 pagineENT300 Presentation by Harith Khalid On PreziEden HazardNessuna valutazione finora
- Individual Design Proposal MEC332Documento1 paginaIndividual Design Proposal MEC332Eden HazardNessuna valutazione finora
- 250 TOP Fluid Mechanics Mechanical Engineering Multiple Choice Questions and Answers List MCQs Preparation For Engineering Competitive Exams PDFDocumento24 pagine250 TOP Fluid Mechanics Mechanical Engineering Multiple Choice Questions and Answers List MCQs Preparation For Engineering Competitive Exams PDFziaNessuna valutazione finora
- PileDocumento23 paginePileSothea BornNessuna valutazione finora
- Deber Elementos de MáquinasDocumento2 pagineDeber Elementos de MáquinasLuis PichoNessuna valutazione finora
- By Ferdinand P. Beer & E. Russell Johnston Jr. With Notes by J. Walt Oler (Texas Tech University)Documento20 pagineBy Ferdinand P. Beer & E. Russell Johnston Jr. With Notes by J. Walt Oler (Texas Tech University)Aizabelle FerrerasNessuna valutazione finora
- The Calculation of Fixed Tubesheet Exchangers According To ASME Section VIII Division1Documento15 pagineThe Calculation of Fixed Tubesheet Exchangers According To ASME Section VIII Division1AKSHAY BHATKAR100% (1)
- GyroDocumento6 pagineGyroLynton MenezesNessuna valutazione finora
- A Comparison of Standard k-ε and Realizable k-ε Turbulence Models in Curved and Confluent ChannelsDocumento27 pagineA Comparison of Standard k-ε and Realizable k-ε Turbulence Models in Curved and Confluent ChannelsStephen Owen HizkiaNessuna valutazione finora
- Summative Test in Grade 10 ScienceDocumento2 pagineSummative Test in Grade 10 ScienceRomeo GabitananNessuna valutazione finora
- PQC Design Tunnel PTLGDocumento31 paginePQC Design Tunnel PTLGrao shoaibNessuna valutazione finora
- Finite Element Shakedown Analysis of Reinforced Concrete 3D FramesDocumento13 pagineFinite Element Shakedown Analysis of Reinforced Concrete 3D Framesjuan carlos molano toroNessuna valutazione finora
- 17me3302 - Unit One TheoryDocumento70 pagine17me3302 - Unit One TheoryZayeem ZehekNessuna valutazione finora
- FEA - Prerequisites: To Solve FEM Problems, It Subdivides A Large Problem Into Small, Simpler Parts That Are CalledDocumento6 pagineFEA - Prerequisites: To Solve FEM Problems, It Subdivides A Large Problem Into Small, Simpler Parts That Are CalledAkshay GiteNessuna valutazione finora
- Shear Strengthening of RC Beams With Web-Bonded Continuous Steel PlatesDocumento12 pagineShear Strengthening of RC Beams With Web-Bonded Continuous Steel PlatesRachida KrachaiNessuna valutazione finora
- Nassim Haramein - The Origin of SpinDocumento16 pagineNassim Haramein - The Origin of SpinBogdan Popa100% (1)
- Experiment No. 2: The Conical PendulumDocumento7 pagineExperiment No. 2: The Conical PendulumHerbert James BandaNessuna valutazione finora
- Effect of Hydroplane Profile On Hydrodynamic Coefficients of An Autonomous Underwater Vehicle PDFDocumento23 pagineEffect of Hydroplane Profile On Hydrodynamic Coefficients of An Autonomous Underwater Vehicle PDFMol MolNessuna valutazione finora
- Test Name: Determination of Tensile Properties of Geotextile Using Wide Strip ScopeDocumento3 pagineTest Name: Determination of Tensile Properties of Geotextile Using Wide Strip ScopeSwapan PaulNessuna valutazione finora
- Homework 9 (Solutions) : Due by 11:45am, Tuesday 6/3/14 (In HW Box in Kemper 2131)Documento14 pagineHomework 9 (Solutions) : Due by 11:45am, Tuesday 6/3/14 (In HW Box in Kemper 2131)Hung NguyênNessuna valutazione finora
- Losses and Efficiency TurbineDocumento28 pagineLosses and Efficiency TurbineAntriksh Singh100% (1)
- Stiffened Plate Buckling DNV-RP-C201 Rev02-December-2011Documento9 pagineStiffened Plate Buckling DNV-RP-C201 Rev02-December-2011Farid TataNessuna valutazione finora
- CES2104 Lecture 1 - Introduction To Statics PDFDocumento23 pagineCES2104 Lecture 1 - Introduction To Statics PDFCarlitos AdarnaNessuna valutazione finora
- Sediment Transport NotesDocumento9 pagineSediment Transport NotesSaul BuitragoNessuna valutazione finora
- CHAPTER-2 Intoduction To ModelingDocumento51 pagineCHAPTER-2 Intoduction To Modelingይታገሡ ተሥፋዬNessuna valutazione finora
- Composite Deck DesignDocumento16 pagineComposite Deck Designvejanidb100% (1)
- TUTORIAL Settling - 20172018 PDFDocumento15 pagineTUTORIAL Settling - 20172018 PDFHomesick TutorsNessuna valutazione finora
- MCQ It 1 Oct 2020Documento8 pagineMCQ It 1 Oct 2020Narayan ManeNessuna valutazione finora