Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Suzuki Jimny Flyer FinalDocumento2 pagineSuzuki Jimny Flyer FinalZeeshan0% (1)
- Flygt IOM 3153-095Documento72 pagineFlygt IOM 3153-095jose03Nessuna valutazione finora
- Johnson Controls Central Plant OptimizationDocumento196 pagineJohnson Controls Central Plant OptimizationRamy MahmoudNessuna valutazione finora
- Electrical Plan (Tracing Paper)Documento1 paginaElectrical Plan (Tracing Paper)Cattleya PenalosaNessuna valutazione finora
- Reaming of Valve Guide After Replacement: Service Letter SL2021-716/JOHPDocumento2 pagineReaming of Valve Guide After Replacement: Service Letter SL2021-716/JOHPprashant manhasNessuna valutazione finora
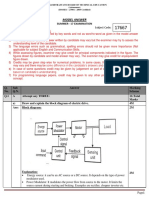
- 2017 Summer Model Answer PaperDocumento22 pagine2017 Summer Model Answer PaperAbhishek ChavanNessuna valutazione finora
- M20 Engine Swap Into E21 320iDocumento14 pagineM20 Engine Swap Into E21 320iorcr51Nessuna valutazione finora
- Analog 4-Wire Video Intercom: Quick Start GuideDocumento16 pagineAnalog 4-Wire Video Intercom: Quick Start GuideJUAN GUERRANessuna valutazione finora
- rcx221 rcx222Documento7 paginercx221 rcx222jose DsNessuna valutazione finora
- Părțile motorului Jawa 889Documento14 paginePărțile motorului Jawa 889GreereCristianNessuna valutazione finora
- (MDI Series) - This Catalogue Is Updated As On 1st September, 2008Documento46 pagine(MDI Series) - This Catalogue Is Updated As On 1st September, 2008rahul mehta100% (1)
- Valve Type Used in Power PlantDocumento14 pagineValve Type Used in Power PlantGourav Choudhuri0% (1)
- Legend for Color names in Vehicle Wiring DiagramDocumento1 paginaLegend for Color names in Vehicle Wiring DiagramJolanda DatemaNessuna valutazione finora
- Alliance Technical Catalog Aug 2022 - LR - 1672742721Documento236 pagineAlliance Technical Catalog Aug 2022 - LR - 1672742721Will CreNessuna valutazione finora
- Gandhi Institude of Excellent Technocrats: Air Braking System On Indian RailwaysDocumento18 pagineGandhi Institude of Excellent Technocrats: Air Braking System On Indian RailwaysDileep Chowdary KuchipudiNessuna valutazione finora
- Programmable Logic Controllers - Basic PLC ComponentsDocumento2 pagineProgrammable Logic Controllers - Basic PLC ComponentsGalco IndustrialNessuna valutazione finora
- Dpla 01 MDocumento10 pagineDpla 01 MzohaibshabirNessuna valutazione finora
- Overhead Set (OBC)Documento19 pagineOverhead Set (OBC)MohamedNessuna valutazione finora
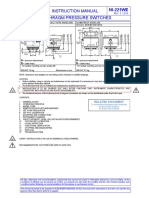
- Instruction Manual Diaphragm Pressure Switches: NI-221WEDocumento9 pagineInstruction Manual Diaphragm Pressure Switches: NI-221WEPaul Ramos CarcaustoNessuna valutazione finora
- BelimoDocumento4 pagineBelimoAnjana2893Nessuna valutazione finora
- BHEL BHOPAL Vocational Training Report - 1301Documento31 pagineBHEL BHOPAL Vocational Training Report - 1301Shubham yadav100% (3)
- Convert DC Signals to Pneumatic SignalsDocumento4 pagineConvert DC Signals to Pneumatic SignalsCharles Louie LibronNessuna valutazione finora
- OT180UNV800C2DIMLT2P6Documento11 pagineOT180UNV800C2DIMLT2P6Ezequiel FregaNessuna valutazione finora
- RAAH Product CategoriesDocumento8 pagineRAAH Product Categoriesraah indiaNessuna valutazione finora
- AKO-14012 AKO-14023, AKO-14123,: 1411H210 Thermometers and Thermostats With 1 Probe and 1 Relay: AKO-140XX, AKO-141XXDocumento2 pagineAKO-14012 AKO-14023, AKO-14123,: 1411H210 Thermometers and Thermostats With 1 Probe and 1 Relay: AKO-140XX, AKO-141XXmartinNessuna valutazione finora
- Electro 3 Lab ResearchDocumento6 pagineElectro 3 Lab ResearchJuan Miguel TorresNessuna valutazione finora
- NFM1 PDFDocumento2 pagineNFM1 PDFCristian MarchisNessuna valutazione finora
- SU 821 - Parts - 2006Documento58 pagineSU 821 - Parts - 2006Centrifugal SeparatorNessuna valutazione finora
- Angle Gauges PDFDocumento2 pagineAngle Gauges PDFpankajdharmadhikariNessuna valutazione finora
- PLC Overview 4104euen0802Documento40 paginePLC Overview 4104euen0802Jeevan JyotiNessuna valutazione finora