Potrebbero piacerti anche
- Armónicas en Sistemas Eléctricos IndustrialesDa EverandArmónicas en Sistemas Eléctricos IndustrialesValutazione: 4.5 su 5 stelle4.5/5 (12)
- P Cap3-1Documento32 pagineP Cap3-1Alvaro GavilanesNessuna valutazione finora
- Curso para MecanicosDocumento51 pagineCurso para MecanicosBogar Pineda100% (14)
- 2 Razones TrigonométricasDocumento17 pagine2 Razones Trigonométricasel fapNessuna valutazione finora
- Practica 1 TermoDocumento21 paginePractica 1 TermoEnrique RoblesNessuna valutazione finora
- Examen 03 (Ok)Documento1 paginaExamen 03 (Ok)Raul Cabanillas CorzoNessuna valutazione finora
- R.V - Semana 06 Eliminación de Oraciones (CepreUni 2019)Documento14 pagineR.V - Semana 06 Eliminación de Oraciones (CepreUni 2019)DJELI RamirezNessuna valutazione finora
- Resistencia Ejercicios de TorsionDocumento5 pagineResistencia Ejercicios de TorsionAnali CabreraNessuna valutazione finora
- GRAFICOS Visual C 0 0k II 0 14731Documento106 pagineGRAFICOS Visual C 0 0k II 0 14731Luis Enrique Villacorta CalleNessuna valutazione finora
- Meca1estatica de Una Particula2018Documento8 pagineMeca1estatica de Una Particula2018Wagner GaitanNessuna valutazione finora
- Informe 4 de FisicaDocumento13 pagineInforme 4 de FisicaDiego AlejandroNessuna valutazione finora
- Problemas de EnfriamientoDocumento16 pagineProblemas de EnfriamientoFrancisco A. BetancourtNessuna valutazione finora
- Hito 2 - SolucionarioDocumento13 pagineHito 2 - SolucionarioRoosevelt Celis Vega HuapayaNessuna valutazione finora
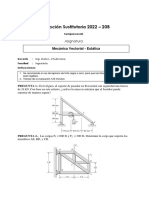
- Prueba - de - Desarrollo - Mecánica Vectorial - Estática REV 1Documento2 paginePrueba - de - Desarrollo - Mecánica Vectorial - Estática REV 1Matematica Fisica Estadistica100% (1)
- ESTATICADocumento20 pagineESTATICAPAUL JHERSON CARCAHUSTO TUMBILLONessuna valutazione finora
- Calculo Vectorial. Examen Sustitutorio y Solucionario 2010-1Documento2 pagineCalculo Vectorial. Examen Sustitutorio y Solucionario 2010-1RubensaiDNessuna valutazione finora
- Guía de Practicas Mat 100Documento11 pagineGuía de Practicas Mat 100DavidNessuna valutazione finora
- Practica Primera ParteDocumento10 paginePractica Primera ParteCHRISTHIAN ALONSO PANTA FARFANNessuna valutazione finora
- Prueba de Entrada de Resistencia de Materiales Es 531 G: Universidad Nacional de IngenieriaDocumento1 paginaPrueba de Entrada de Resistencia de Materiales Es 531 G: Universidad Nacional de IngenieriaRENZO ANDRES VELASQUEZ LOZANONessuna valutazione finora
- 2.0.taller Diagnóstico 3-Resistencia de Materiales Anggie RincónDocumento2 pagine2.0.taller Diagnóstico 3-Resistencia de Materiales Anggie RincónHarol AngaritaNessuna valutazione finora
- 2021-02-15 Análisis de Elementos de Mecanismos y Fundamentos de Diseño - Cuarta Práctica BDocumento2 pagine2021-02-15 Análisis de Elementos de Mecanismos y Fundamentos de Diseño - Cuarta Práctica BAugusto MantillaNessuna valutazione finora
- QuimicaaDocumento5 pagineQuimicaaJhon Monzon100% (1)
- ToroideDocumento9 pagineToroideRafaSanchez100% (1)
- Ejercicios de Solidos RigidosDocumento33 pagineEjercicios de Solidos RigidosRosario RevillaNessuna valutazione finora
- Ley de SchmitDocumento3 pagineLey de SchmitRocio Alejandra Marin GattoniNessuna valutazione finora
- 11 Ie MD - Guiulfo Tafur - La Molina GTDocumento5 pagine11 Ie MD - Guiulfo Tafur - La Molina GTGuiulfo Tafur HidalgoNessuna valutazione finora
- Simulador de Máquinas Eléctrica Validado. Sesión 1: Obtención de Parámetros Eléctricos y Mecánicos de Una MCCDocumento6 pagineSimulador de Máquinas Eléctrica Validado. Sesión 1: Obtención de Parámetros Eléctricos y Mecánicos de Una MCCflmwwNessuna valutazione finora
- Poliedros Regula 17Documento9 paginePoliedros Regula 17Profesor_DataNessuna valutazione finora
- 13 Conamat 5to SecDocumento4 pagine13 Conamat 5to SecAlex Tenorio ArqueNessuna valutazione finora
- Analisis Combinatoria+fracciones+conjutnos Teoria PDFDocumento9 pagineAnalisis Combinatoria+fracciones+conjutnos Teoria PDFangie luciana yauli acostaNessuna valutazione finora
- 600-Ejercicios-Resueltos DE ALGEBRADocumento646 pagine600-Ejercicios-Resueltos DE ALGEBRAMarcelino PrudencioNessuna valutazione finora
- Calculo 2 UisDocumento5 pagineCalculo 2 UisDayanna FuentesNessuna valutazione finora
- Laboratorio Fisica 2 FIEE UNIDocumento10 pagineLaboratorio Fisica 2 FIEE UNIRenzo Mamani MallmaNessuna valutazione finora
- EJERCICIOS DEL 2.1 Al 2.11 Creo Que Es de Estatica Falta CompletarDocumento11 pagineEJERCICIOS DEL 2.1 Al 2.11 Creo Que Es de Estatica Falta CompletarAngie JayaNessuna valutazione finora
- Ecualizador de OctavasDocumento15 pagineEcualizador de OctavasWilliam MuñozNessuna valutazione finora
- Ejercicio 11Documento10 pagineEjercicio 11evelinNessuna valutazione finora
- PDF Dinamica Lineal y Circular Terminadodocx DDDocumento6 paginePDF Dinamica Lineal y Circular Terminadodocx DDJuega EduardoNessuna valutazione finora
- Cinematica de Cuerpo Rigido en El Espacio 2017-2 PDFDocumento58 pagineCinematica de Cuerpo Rigido en El Espacio 2017-2 PDFJEAN ALARCONNessuna valutazione finora
- Pendulo SimpleDocumento9 paginePendulo Simpleanon_745852220Nessuna valutazione finora
- Semana 10 PDFDocumento56 pagineSemana 10 PDFMarcelino Galindo100% (1)
- Matematica 3Documento6 pagineMatematica 3jhunior carlos eduardo gamboa herreraNessuna valutazione finora
- Evaluaciones Resueltas EDO 2019A EPNDocumento37 pagineEvaluaciones Resueltas EDO 2019A EPNKAGGHGNessuna valutazione finora
- Física 100 USM C1 2011Documento8 pagineFísica 100 USM C1 2011Chaparrón Bonaparte100% (1)
- Calculo para Seleccionar Las Fajas Trapezoidales en VDocumento3 pagineCalculo para Seleccionar Las Fajas Trapezoidales en VKevin OlazabalNessuna valutazione finora
- PRACTICA 4. Sumador RestadorDocumento2 paginePRACTICA 4. Sumador RestadorJuan Camilo Guio PuertoNessuna valutazione finora
- TOMO-II (1) Geometria PDFDocumento17 pagineTOMO-II (1) Geometria PDFJhon J Chavez FigueroaNessuna valutazione finora
- Probeta Acero A-36 1ra CargaDocumento5 pagineProbeta Acero A-36 1ra CargawilliamNessuna valutazione finora
- ML140 B P1 20172T PDFDocumento2 pagineML140 B P1 20172T PDFjhojanNessuna valutazione finora
- Segunda Ley de NewtonDocumento13 pagineSegunda Ley de NewtonRIKMATTNessuna valutazione finora
- Trigonometria 2007 - 4to AñoDocumento139 pagineTrigonometria 2007 - 4to AñoWALSEN HELIAN100% (1)
- InformeDocumento10 pagineInformeVicthor ReisoNessuna valutazione finora
- III B Fisica GuiaDocumento55 pagineIII B Fisica GuiaAlex pes 2020Nessuna valutazione finora
- Eje Tensor Polea PDFDocumento1 paginaEje Tensor Polea PDFJames MachadoNessuna valutazione finora
- Examen Parcial VC 2023 1Documento8 pagineExamen Parcial VC 2023 1JACK REY100% (1)
- Estatica ProblemasDocumento14 pagineEstatica ProblemasitaloCTNessuna valutazione finora
- Practica Dirigida 3 de Algebra LinealDocumento6 paginePractica Dirigida 3 de Algebra LinealChristian Lazarte OyagueNessuna valutazione finora
- 4 Flecha y Pendiente IDocumento38 pagine4 Flecha y Pendiente IJuan ValdezNessuna valutazione finora
- Proyecto 10 - Ejes de Transmision de PotenciaDocumento45 pagineProyecto 10 - Ejes de Transmision de PotenciaCarlos HuarcayaNessuna valutazione finora
- Tarea 2Documento8 pagineTarea 2Angibel RodriguezNessuna valutazione finora
- Instalaciones Eléctricas IndustrialesDocumento24 pagineInstalaciones Eléctricas IndustrialesAngell GpNessuna valutazione finora
- Resolución de Problemas-Selección de TurbinasDocumento32 pagineResolución de Problemas-Selección de TurbinasJavier Rojas TrujilloNessuna valutazione finora
- Ejercicios sobre elasticidad y resistencia de materialesDa EverandEjercicios sobre elasticidad y resistencia de materialesNessuna valutazione finora
- Estabilidad LongitudinalDocumento7 pagineEstabilidad LongitudinalCHRISTIAN JULCAMORO PALOMINONessuna valutazione finora
- Traslacion de PesoDocumento2 pagineTraslacion de PesoCHRISTIAN JULCAMORO PALOMINO100% (1)
- TrimadoDocumento1 paginaTrimadoCHRISTIAN JULCAMORO PALOMINONessuna valutazione finora
- Información de Facturación y EnvíoDocumento3 pagineInformación de Facturación y EnvíoCHRISTIAN JULCAMORO PALOMINONessuna valutazione finora
- Estado de CuentaDocumento1 paginaEstado de CuentaCHRISTIAN JULCAMORO PALOMINONessuna valutazione finora
- Diseño y Construccion de Un Calorimetro Adiabatico Tipo DewarDocumento10 pagineDiseño y Construccion de Un Calorimetro Adiabatico Tipo DewarJuan Enrique Valerin ReyesNessuna valutazione finora
- Unidad 2. Ejemplos 4 y 5. Ejercicio Propuesto CORREGIDODocumento5 pagineUnidad 2. Ejemplos 4 y 5. Ejercicio Propuesto CORREGIDOluna martinezNessuna valutazione finora
- Diapositivas Análisis Pseudotridimensional - g5Documento53 pagineDiapositivas Análisis Pseudotridimensional - g5JESUS ENRIQUE GARCIA YNOÑANNessuna valutazione finora
- Apuntalamiento EdificiosDocumento87 pagineApuntalamiento EdificiosJuls SuigenerisNessuna valutazione finora
- Solucionario - Autoaprendizaje 2Documento6 pagineSolucionario - Autoaprendizaje 2Ethan SosaNessuna valutazione finora
- Com Puertas Pract R Doc XDocumento18 pagineCom Puertas Pract R Doc XÁlvaro W. Chura CaballeroNessuna valutazione finora
- Turbina PeltonDocumento1 paginaTurbina PeltonGerman AlexanderNessuna valutazione finora
- DocumentoDocumento6 pagineDocumentoMoraa KuraanNessuna valutazione finora
- Manual Curso CarretilleroDocumento36 pagineManual Curso CarretilleroJuan C Tey AlmaguerNessuna valutazione finora
- Airbag AnalisisDocumento114 pagineAirbag AnalisishugodiNessuna valutazione finora
- Presión Del Embrague Del Control Hidráulico de La Transmisión - PruebaDocumento8 paginePresión Del Embrague Del Control Hidráulico de La Transmisión - PruebaQuirozRojasCesarNessuna valutazione finora
- Leyes de Newton TraducidasDocumento4 pagineLeyes de Newton TraducidasCamilo Andres CardenasNessuna valutazione finora
- Practica 2 2019Documento2 paginePractica 2 2019KenryuNessuna valutazione finora
- Física I-Examen Del 12 de Enero de 2016: Parte 1. Teoría (30% de La Nota Final)Documento12 pagineFísica I-Examen Del 12 de Enero de 2016: Parte 1. Teoría (30% de La Nota Final)MateoNessuna valutazione finora
- Clase 7 Albañilería de Tierra. La Tierra Cocida - Muro ConfinadoDocumento34 pagineClase 7 Albañilería de Tierra. La Tierra Cocida - Muro ConfinadoClaudia Vilcabana ZamoraNessuna valutazione finora
- Proyecto Luis 1 2 3 4Documento61 pagineProyecto Luis 1 2 3 4carlosNessuna valutazione finora
- Helicopteros 03Documento23 pagineHelicopteros 03Roberto LuisNessuna valutazione finora
- Aplicaciones de La Presión de VaporDocumento6 pagineAplicaciones de La Presión de VaporJuan Diego Garcia Hancco0% (1)
- LAMPARA TERMODINAMICA IncompDocumento5 pagineLAMPARA TERMODINAMICA IncompJoule Rimber Garcia ArotaipeNessuna valutazione finora
- Term o Metro GalileoDocumento4 pagineTerm o Metro Galileogaminster69350% (1)
- Problemas Física - Movimientos PeriódicosDocumento5 pagineProblemas Física - Movimientos PeriódicosJaimeSánchezNessuna valutazione finora
- Trabajo 3 - Caso 3 - Dos Bombas en Paralelo A TanqueDocumento8 pagineTrabajo 3 - Caso 3 - Dos Bombas en Paralelo A Tanquedavid mario muñoz ibarraNessuna valutazione finora
- Desecacion y LiofilizacionDocumento1 paginaDesecacion y LiofilizacionJavier Mita MoyaNessuna valutazione finora
- Tema 5 Losas en Dos Direcciones - Metodo de Diseño DirectoDocumento22 pagineTema 5 Losas en Dos Direcciones - Metodo de Diseño DirectoQC A NoelNessuna valutazione finora
- Formulas VigasDocumento3 pagineFormulas VigasCésar Díaz100% (7)
- 2954 2280 40 Compressor XRX 10 Spanish 2 PDFDocumento36 pagine2954 2280 40 Compressor XRX 10 Spanish 2 PDFEsteban Fernando Meza IbacetaNessuna valutazione finora
- Ejes Y Cojinetes: Unidad XiiDocumento21 pagineEjes Y Cojinetes: Unidad XiigeoswaldNessuna valutazione finora
- Neumatica Cap IIDocumento7 pagineNeumatica Cap IILuis QuispeNessuna valutazione finora