Potrebbero piacerti anche
- Engineering Optimization: An Introduction with Metaheuristic ApplicationsDa EverandEngineering Optimization: An Introduction with Metaheuristic ApplicationsNessuna valutazione finora
- Digital Signal Processing LabDocumento26 pagineDigital Signal Processing LabDurotan123Nessuna valutazione finora
- An Introduction To Image CompressionDocumento58 pagineAn Introduction To Image CompressionRajiv KumarNessuna valutazione finora
- DSP SyllabusDocumento2 pagineDSP SyllabusVinit SutarNessuna valutazione finora
- DSP Lab AssignmentsDocumento112 pagineDSP Lab Assignmentsgoons7777Nessuna valutazione finora
- Lab 6 - Matlab FDAToolsDocumento4 pagineLab 6 - Matlab FDAToolsQuýHoàngNessuna valutazione finora
- Filter Design and Analysis ToolDocumento8 pagineFilter Design and Analysis ToolEngr Rizwan KhattakNessuna valutazione finora
- FIR FilterDocumento32 pagineFIR FilterWan TingNessuna valutazione finora
- Wavelets and Multiresolution: by Dr. Mahua BhattacharyaDocumento39 pagineWavelets and Multiresolution: by Dr. Mahua BhattacharyashubhamNessuna valutazione finora
- FIR Filter DesignDocumento19 pagineFIR Filter DesignPoonam Pratap KadamNessuna valutazione finora
- 630 hw3 SolnDocumento6 pagine630 hw3 Solnboggled429Nessuna valutazione finora
- DSP SyllabusDocumento4 pagineDSP SyllabusDarshan BhattNessuna valutazione finora
- 4 Sampling Quantization 0809Documento13 pagine4 Sampling Quantization 0809maricela_eliz453Nessuna valutazione finora
- Digital Filter DesignDocumento102 pagineDigital Filter Designjaun danielNessuna valutazione finora
- Machine Learning and Applications: AssignmentDocumento2 pagineMachine Learning and Applications: AssignmentSatish B basapurNessuna valutazione finora
- PSD Autocorrelation NoiseDocumento7 paginePSD Autocorrelation NoiseM MovNessuna valutazione finora
- Design Technique of Bandpass FIR Filter Using Various Window FunctionDocumento6 pagineDesign Technique of Bandpass FIR Filter Using Various Window FunctionSai ManojNessuna valutazione finora
- DSP Matlab ProgramsDocumento50 pagineDSP Matlab ProgramsDhiraj Thakur67% (3)
- DSP ReportDocumento5 pagineDSP ReportKurnia WanNessuna valutazione finora
- Analog Communication NotesDocumento73 pagineAnalog Communication NotesAravindha Bhat100% (1)
- Fir Filters ReportDocumento8 pagineFir Filters ReportGaneshVenkatachalamNessuna valutazione finora
- Ktu SyllabusDocumento87 pagineKtu SyllabusPratheesh BoseNessuna valutazione finora
- Speech CodingDocumento36 pagineSpeech Codingrajjannith100% (3)
- Min Filter - Matlab Code - Image ProcessingDocumento3 pagineMin Filter - Matlab Code - Image Processingaloove660% (2)
- MATLAB Code For Speech RecognitionDocumento4 pagineMATLAB Code For Speech RecognitionRavi TejaNessuna valutazione finora
- Wiener Filter 1Documento11 pagineWiener Filter 1Vanidevi ManiNessuna valutazione finora
- DSP EC 2302 16 Mark QuestionsDocumento3 pagineDSP EC 2302 16 Mark QuestionsVenkat RamananNessuna valutazione finora
- Final Report PDFDocumento28 pagineFinal Report PDF9634968183Nessuna valutazione finora
- Bartlett Window Using MatlabDocumento5 pagineBartlett Window Using MatlabAnushree ShahdeoNessuna valutazione finora
- CELPDocumento23 pagineCELPANeek181Nessuna valutazione finora
- Infinite Impulse ResponseDocumento126 pagineInfinite Impulse ResponseLe BinhNessuna valutazione finora
- ADC Chapter 1 NotesDocumento24 pagineADC Chapter 1 NotesatifNessuna valutazione finora
- DSP Question Bank PDFDocumento4 pagineDSP Question Bank PDFSarath KumarNessuna valutazione finora
- Chapter 15 - Digital Filter Design - Book - Programming DsPIC MCU in PASCAL - MikroElektronika1111Documento9 pagineChapter 15 - Digital Filter Design - Book - Programming DsPIC MCU in PASCAL - MikroElektronika1111huthaifa85Nessuna valutazione finora
- Ec 6511 Digital Signal Processing Lab Manual PDFDocumento88 pagineEc 6511 Digital Signal Processing Lab Manual PDFBala913Nessuna valutazione finora
- Fir FilterDocumento10 pagineFir FilterAravind RameshNessuna valutazione finora
- Filter Programs MatlabDocumento8 pagineFilter Programs MatlabPreethi Sj100% (1)
- DSP Lab ManualDocumento105 pagineDSP Lab ManualSravanthi RajigariNessuna valutazione finora
- Unit 4 Bandpass Modulation and DemodulationDocumento107 pagineUnit 4 Bandpass Modulation and DemodulationSagar MenonNessuna valutazione finora
- Advanced DSPDocumento2 pagineAdvanced DSPAshar Wahid Hashmi50% (2)
- Matlab Code For Basic DSP Signals MATLAB PROGRAM TO DISPLAY THE PROPERTIES OF DISCRETE FOURIER TRANSFORM (DFT)Documento16 pagineMatlab Code For Basic DSP Signals MATLAB PROGRAM TO DISPLAY THE PROPERTIES OF DISCRETE FOURIER TRANSFORM (DFT)Sabithkk2007Nessuna valutazione finora
- EE-330 Digital Signal Processing Lab1 CoDocumento6 pagineEE-330 Digital Signal Processing Lab1 CoZedrik MojicaNessuna valutazione finora
- 5,6 Ldic New Course FileDocumento49 pagine5,6 Ldic New Course FileTarun PrasadNessuna valutazione finora
- Correlation of Discrete-Time SignalsDocumento12 pagineCorrelation of Discrete-Time SignalstruetrueNessuna valutazione finora
- Lab 5. FIR Filter Design in MatlabDocumento14 pagineLab 5. FIR Filter Design in MatlabShreyash SillNessuna valutazione finora
- Signals in MatLab PDFDocumento18 pagineSignals in MatLab PDFPratik SarkarNessuna valutazione finora
- Compression and Decompression TechniquesDocumento68 pagineCompression and Decompression TechniquesVarun JainNessuna valutazione finora
- Lab 5Documento14 pagineLab 5Ram MurtiNessuna valutazione finora
- Spectral Estimation NotesDocumento6 pagineSpectral Estimation NotesSantanu Ghorai100% (1)
- Fir Kaiser Window Notes-3 PDFDocumento19 pagineFir Kaiser Window Notes-3 PDFprajwalNessuna valutazione finora
- Ergodic Capacity of NR X NT Fading MIMO Channel WithDocumento6 pagineErgodic Capacity of NR X NT Fading MIMO Channel WithNur A Adam DonyNessuna valutazione finora
- Design of FIR FilterDocumento41 pagineDesign of FIR Filterrsenthil_1976Nessuna valutazione finora
- DSP Iir BZTDocumento9 pagineDSP Iir BZTMaaz MyzxNessuna valutazione finora
- Linear CryptanalysisDocumento19 pagineLinear CryptanalysisAnil KcNessuna valutazione finora
- Multi Resolution Based Fusion Using Discrete Wavelet Transform.Documento27 pagineMulti Resolution Based Fusion Using Discrete Wavelet Transform.saranrajNessuna valutazione finora
- Convolutional Codes PuncturingDocumento13 pagineConvolutional Codes PuncturinghunterdlrNessuna valutazione finora
- 5 FFTDocumento39 pagine5 FFTMuthu Mari100% (1)
- Simulation & Comparison of Various Source Coding Techniques - FINAL - PPTDocumento22 pagineSimulation & Comparison of Various Source Coding Techniques - FINAL - PPTSAGAR PATELNessuna valutazione finora
- Inspection & Maintenance of Dams: Dam Safety GuidelinesDocumento79 pagineInspection & Maintenance of Dams: Dam Safety Guidelinesvishu1909100% (1)
- WWW - Manaresults.Co - In: Set No. 1Documento4 pagineWWW - Manaresults.Co - In: Set No. 1Chanumolu DushyanthNessuna valutazione finora
- Bricks ComparisonDocumento13 pagineBricks ComparisonMd. Numan HossainNessuna valutazione finora
- Applied Hydrology LabDocumento6 pagineApplied Hydrology Labshehbaz3gNessuna valutazione finora
- Guide To The Systems Engineering Body of Knowledge (Sebok), Version 1.1Documento51 pagineGuide To The Systems Engineering Body of Knowledge (Sebok), Version 1.1António FerreiraNessuna valutazione finora
- Modern PetrochemicalsDocumento179 pagineModern PetrochemicalsHani Kirmani100% (9)
- ASTM E1417 Penetrant Testing - 9 PDFDocumento11 pagineASTM E1417 Penetrant Testing - 9 PDFbikaNessuna valutazione finora
- Interfaces KelloggDocumento16 pagineInterfaces KelloggUrrNessuna valutazione finora
- Architectural Drawing and Design PHS Syllabus 0910Documento4 pagineArchitectural Drawing and Design PHS Syllabus 0910nourhanNessuna valutazione finora
- Lhotse Manual E V1.2Documento46 pagineLhotse Manual E V1.2vpNessuna valutazione finora
- Minimum Load For Empty Minimum Load For OperatingDocumento6 pagineMinimum Load For Empty Minimum Load For OperatingjitendraNessuna valutazione finora
- KM Adhikarya - TBK KomplitDocumento15 pagineKM Adhikarya - TBK KomplitHelloMotion AcademyNessuna valutazione finora
- Fastening SystemsDocumento74 pagineFastening SystemsskyvaneNessuna valutazione finora
- Catalogue For AutoDocumento22 pagineCatalogue For Autosentimiento azulNessuna valutazione finora
- d8n Wiring HardnessDocumento2 pagined8n Wiring HardnessandraNessuna valutazione finora
- 130195mitsubishi ManualDocumento16 pagine130195mitsubishi ManualAbdul Noor KhanNessuna valutazione finora
- Metrolla Steels Industrial Visit ReportDocumento39 pagineMetrolla Steels Industrial Visit ReportSanjay R Nair100% (1)
- Memristor Modeling in MATLAB®&SimulinkDocumento6 pagineMemristor Modeling in MATLAB®&Simulinkjoseamh69062247Nessuna valutazione finora
- Assignment Booklet Me2353 Finite Element Analysis Dec 2013 May 2014Documento85 pagineAssignment Booklet Me2353 Finite Element Analysis Dec 2013 May 2014Ashok Kumar Rajendran100% (9)
- Yale PD2, C85, D85Documento28 pagineYale PD2, C85, D85LGWILDCAT73Nessuna valutazione finora
- Shell Spirax S6 Txme: Performance, Features & BenefitsDocumento2 pagineShell Spirax S6 Txme: Performance, Features & BenefitsAbdelhadi HoussinNessuna valutazione finora
- Empaque Espirometalicos PDFDocumento50 pagineEmpaque Espirometalicos PDFgregorioNessuna valutazione finora
- TTO-ST-0-SPC-05100 - Structural Steel SpecificationDocumento18 pagineTTO-ST-0-SPC-05100 - Structural Steel Specificationsara saravananNessuna valutazione finora
- C# Jumpstart Module 1 IntroDocumento31 pagineC# Jumpstart Module 1 IntroAnjana JayasekaraNessuna valutazione finora
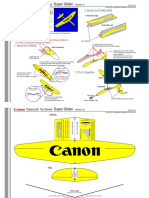
- Planeur Tres Simple PDFDocumento3 paginePlaneur Tres Simple PDFAhmedNessuna valutazione finora
- SA-6 Press KitDocumento53 pagineSA-6 Press KitBob Andrepont100% (1)
- Tutorial Sheet 7Documento2 pagineTutorial Sheet 7Muhammad NidzwanNessuna valutazione finora
- Modeling and Control of Side Face Beam Cracking - FroschDocumento10 pagineModeling and Control of Side Face Beam Cracking - FroschphamminhquangNessuna valutazione finora
- Chapter 5Documento64 pagineChapter 5pintu13Nessuna valutazione finora
- Astm A182 f22 Class 3Documento3 pagineAstm A182 f22 Class 3VõTạNessuna valutazione finora