Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Easytronic Micro II (2012 Revision15) ControllerDocumento11 pagineEasytronic Micro II (2012 Revision15) Controllermohammedalathwary56% (9)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Industrial-Data-Communications (pg22) PDFDocumento285 pagineIndustrial-Data-Communications (pg22) PDFBruno Martins100% (2)
- GDKDocumento30 pagineGDKRobert Aguilar100% (4)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- GBA 26800 H IV OVF 20 Service - ToolDocumento31 pagineGBA 26800 H IV OVF 20 Service - ToolPeter80% (15)
- NICE3000 Synchronous Motor Adjusting Manual - PDF - PDFDocumento29 pagineNICE3000 Synchronous Motor Adjusting Manual - PDF - PDFJouny Wael100% (4)
- NICE3000 Synchronous Motor Adjusting Manual - PDF - PDFDocumento29 pagineNICE3000 Synchronous Motor Adjusting Manual - PDF - PDFJouny Wael100% (4)
- Smart Home Automation Using AndroidDocumento8 pagineSmart Home Automation Using Androidultimatekp144100% (1)
- Break SpecificationsDocumento1 paginaBreak SpecificationsmohammedalathwaryNessuna valutazione finora
- Page0023 PDFDocumento1 paginaPage0023 PDFmohammedalathwaryNessuna valutazione finora
- Chapt Er2Wi Ri NG: 2. 1termi Naldefi Ni T I OnDocumento1 paginaChapt Er2Wi Ri NG: 2. 1termi Naldefi Ni T I OnmohammedalathwaryNessuna valutazione finora
- Break Reless Chapter 1 IntroDocumento1 paginaBreak Reless Chapter 1 IntromohammedalathwaryNessuna valutazione finora
- OTIS 506, 506SL, 510 UNITS: Precision Escalator Products, IncDocumento10 pagineOTIS 506, 506SL, 510 UNITS: Precision Escalator Products, IncmohammedalathwaryNessuna valutazione finora
- Technical Manual and Electronical Regulation Vvvf-4: Cabin DoorsDocumento7 pagineTechnical Manual and Electronical Regulation Vvvf-4: Cabin DoorsMaicol Rodolfo CaizaNessuna valutazione finora
- Sky301-V3 User ManualDocumento16 pagineSky301-V3 User Manualمحمدحماد100% (1)
- EWD-RL-J2 Elevator Weighing Device Introdtion Manual (V2.0) : DeclarationDocumento12 pagineEWD-RL-J2 Elevator Weighing Device Introdtion Manual (V2.0) : Declarationmohammedalathwary100% (4)
- Sec Electronics: Exchange Safety Circuit 185 With Safety Circuit 186Documento1 paginaSec Electronics: Exchange Safety Circuit 185 With Safety Circuit 186mohammedalathwaryNessuna valutazione finora
- VanderGraaf INSTALL-MANUAL PDFDocumento18 pagineVanderGraaf INSTALL-MANUAL PDFJonathan Omar Martinez HernandezNessuna valutazione finora
- Electronics Prom Programmer Series Ii User Manual MODELS 160 170 180 200Documento31 pagineElectronics Prom Programmer Series Ii User Manual MODELS 160 170 180 200mohammedalathwaryNessuna valutazione finora
- Sec Electronics: Exchange Safety Circuit 185 With Safety Circuit 186Documento1 paginaSec Electronics: Exchange Safety Circuit 185 With Safety Circuit 186mohammedalathwaryNessuna valutazione finora
- P Ja 51687 Av TF32 VDDocumento3 pagineP Ja 51687 Av TF32 VDrabreyNessuna valutazione finora
- De DP016Documento14 pagineDe DP016mohammedalathwaryNessuna valutazione finora
- Alhamdany Hospital: Partner Asansör FormDocumento1 paginaAlhamdany Hospital: Partner Asansör FormmohammedalathwaryNessuna valutazione finora
- HGL10 Operation Service ManualDocumento49 pagineHGL10 Operation Service ManualmohammedalathwaryNessuna valutazione finora
- Car Operating Panels & Landing Push Stations: Lift ComponetsDocumento1 paginaCar Operating Panels & Landing Push Stations: Lift ComponetsmohammedalathwaryNessuna valutazione finora
- Warnings: Device Usage and Operation SequenceDocumento9 pagineWarnings: Device Usage and Operation Sequencemohammedalathwary100% (1)
- Icsoftware Instructions Procedure Brief1.Get Into The Software 2.add Elevator Data 3.switch Card 4.write Owner CardDocumento5 pagineIcsoftware Instructions Procedure Brief1.Get Into The Software 2.add Elevator Data 3.switch Card 4.write Owner CardmohammedalathwaryNessuna valutazione finora
- SJT-WVF-V Group Control User Manual (Version 2018) : Shenyang Bluelight 2018.7.9Documento16 pagineSJT-WVF-V Group Control User Manual (Version 2018) : Shenyang Bluelight 2018.7.9mohammedalathwary100% (2)
- 标准版供电装置hcyd22 Xx Ag2说明书4.70 Tdgk Vr1.1板子英文 单相Documento7 pagine标准版供电装置hcyd22 Xx Ag2说明书4.70 Tdgk Vr1.1板子英文 单相mohammedalathwary100% (1)
- 标准版供电装置hcyd22 Xx Ag2说明书4.70 Tdgk Vr1.1板子英文 单相Documento7 pagine标准版供电装置hcyd22 Xx Ag2说明书4.70 Tdgk Vr1.1板子英文 单相mohammedalathwary100% (1)
- Manual For EncoderDocumento2 pagineManual For EncodermohammedalathwaryNessuna valutazione finora
- Emcp II Sensor CheckDocumento14 pagineEmcp II Sensor CheckAbdul Khaliq100% (1)
- Electrical QuestionsDocumento6 pagineElectrical QuestionsarupNessuna valutazione finora
- 2014-02 TestingCathodicProtectionSystems Slides 508Documento49 pagine2014-02 TestingCathodicProtectionSystems Slides 508shejin R.SNessuna valutazione finora
- Adoc - Pub SMP Kelas 9 Fisika Bab 2 Rangkaian Listrik Dan SumDocumento37 pagineAdoc - Pub SMP Kelas 9 Fisika Bab 2 Rangkaian Listrik Dan Sumno replayNessuna valutazione finora
- PLCYC1Documento4 paginePLCYC1skitz104Nessuna valutazione finora
- A Presentation On-: E-Paper TechnologyDocumento19 pagineA Presentation On-: E-Paper TechnologyRevanth Kumar TalluruNessuna valutazione finora
- Service Manual: Serving The Physician Since 1937Documento72 pagineService Manual: Serving The Physician Since 1937JiThiN vPNessuna valutazione finora
- Design and Implementation of I2C Bus Protocol On Fpga Using Verilog For EepromDocumento5 pagineDesign and Implementation of I2C Bus Protocol On Fpga Using Verilog For EepromRohail AhmedNessuna valutazione finora
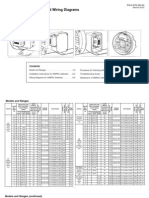
- Installation Instructions and Wiring Diagrams For All Models and RangesDocumento8 pagineInstallation Instructions and Wiring Diagrams For All Models and RangesMaria MusyNessuna valutazione finora
- Instrukcja Obslugi MODECOM Volcano Amirani ARGBDocumento2 pagineInstrukcja Obslugi MODECOM Volcano Amirani ARGBKarol KotekNessuna valutazione finora
- Manual Partes Millermatic 350Documento43 pagineManual Partes Millermatic 350Miguel Angel Pavon CarbonellNessuna valutazione finora
- Electronic Symbol - WikipediaDocumento11 pagineElectronic Symbol - WikipediaLevy Faria GiembinskyNessuna valutazione finora
- Equinox Lipo Cell Balancer-ManualDocumento6 pagineEquinox Lipo Cell Balancer-ManualKin TiriyasNessuna valutazione finora
- Ra-1900 Ii2 Qi 1-0-0Documento41 pagineRa-1900 Ii2 Qi 1-0-0Gustavo BessoneNessuna valutazione finora
- General Physics 2 ReviewerDocumento21 pagineGeneral Physics 2 ReviewervaljeanphantomNessuna valutazione finora
- Swimming Pool Lighting DesignDocumento2 pagineSwimming Pool Lighting DesignquletjavierNessuna valutazione finora
- CHAPTER VII Direct Current CircuitsDocumento28 pagineCHAPTER VII Direct Current CircuitsNandya GuvitaNessuna valutazione finora
- Delta Elevator Drive VFD-ED Series User ManualDocumento228 pagineDelta Elevator Drive VFD-ED Series User ManualMohammed HussenNessuna valutazione finora
- Universal Receiver: Wireless AccelerometerDocumento2 pagineUniversal Receiver: Wireless AccelerometerMarco SotoNessuna valutazione finora
- PHY-101 - Applied OpticsDocumento2 paginePHY-101 - Applied Opticspriyanshi mishraNessuna valutazione finora
- Camara Vivotek PZ7111Documento12 pagineCamara Vivotek PZ7111TecnoSmartNessuna valutazione finora
- Cbse 12th 2019 Physics Answer Key Solution 55 2 1 by Govt PDFDocumento21 pagineCbse 12th 2019 Physics Answer Key Solution 55 2 1 by Govt PDFbhabesh acharyaNessuna valutazione finora
- Physics 5054 P2 Complete Electricity Topical Past Paper (Only Questions)Documento183 paginePhysics 5054 P2 Complete Electricity Topical Past Paper (Only Questions)Manthan ChakrabortyNessuna valutazione finora
- Bizhub C652 C552 Theory of OperationDocumento400 pagineBizhub C652 C552 Theory of Operationtesla500Nessuna valutazione finora
- September 04 2022 NEET UG Re Exam Combined Solution Code W6 1Documento46 pagineSeptember 04 2022 NEET UG Re Exam Combined Solution Code W6 1Bishal ChowdhuryNessuna valutazione finora
- CSIO-PS1 ReportDocumento14 pagineCSIO-PS1 ReportRajan WaliyaNessuna valutazione finora
- Site MapDocumento1 paginaSite MapDavid MucollariNessuna valutazione finora
- Checking Data, I-CANDocumento3 pagineChecking Data, I-CANWaldek KozlowskiNessuna valutazione finora
- Virtual-Circuit Networks: Frame Relay and ATMDocumento24 pagineVirtual-Circuit Networks: Frame Relay and ATMdil_18100% (1)