Potrebbero piacerti anche
- The Law of The Squares - John SearlDocumento3 pagineThe Law of The Squares - John Searlwatchman580% (1)
- CANBus: (1) How It Works, (2) Case Applications For Nissan Leaf & Volvo S80Documento33 pagineCANBus: (1) How It Works, (2) Case Applications For Nissan Leaf & Volvo S80yogapost100% (3)
- Manual UPS MasterguardDocumento23 pagineManual UPS Masterguardemraposo50% (4)
- CANBUS OverviewDocumento65 pagineCANBUS Overviewgaby100% (1)
- Automated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsDa EverandAutomated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsNessuna valutazione finora
- General Notes 1.0: Automatic Sweep-Off Depalletiser Mod. UNI 700Documento11 pagineGeneral Notes 1.0: Automatic Sweep-Off Depalletiser Mod. UNI 700Reza KühnNessuna valutazione finora
- Controller Area Network (CAN) : Group 54CDocumento190 pagineController Area Network (CAN) : Group 54Ctong SaetungNessuna valutazione finora
- Canbus TritonDocumento86 pagineCanbus TritonAndika SetiyawanNessuna valutazione finora
- GR00006800 54C PDFDocumento218 pagineGR00006800 54C PDFToponari MedveNessuna valutazione finora
- 54C Controller Area Network (CAN)Documento11 pagine54C Controller Area Network (CAN)manhNessuna valutazione finora
- TDS6301 Uap02 Ap05 PDF02Documento59 pagineTDS6301 Uap02 Ap05 PDF02Dieguito GutierrezNessuna valutazione finora
- TEXAS CAN BUS NodoDocumento10 pagineTEXAS CAN BUS Nodogiorgio94puglisiNessuna valutazione finora
- CAN BusDocumento14 pagineCAN BusMoh.Iqbal Haryono Putra100% (1)
- Can CommunicationDocumento139 pagineCan CommunicationMirceaNessuna valutazione finora
- Can BusDocumento14 pagineCan BusNguyễn VỹNessuna valutazione finora
- CAN (Controller Area Network) : CAN System Diagram (RX330)Documento7 pagineCAN (Controller Area Network) : CAN System Diagram (RX330)JoelNessuna valutazione finora
- An5878 How To Design A Robust Automotive Can System StmicroelectronicsDocumento29 pagineAn5878 How To Design A Robust Automotive Can System StmicroelectronicsBeto YoshidaNessuna valutazione finora
- P.54D 17 Outlander ForumDocumento192 pagineP.54D 17 Outlander ForumAnton DlabacNessuna valutazione finora
- Can Line Testing WaveformsDocumento4 pagineCan Line Testing WaveformsRowan CorneliusNessuna valutazione finora
- CAN Bus Sloa101bDocumento17 pagineCAN Bus Sloa101bgatotNessuna valutazione finora
- ElmsDocumento37 pagineElmsMuhammad Zain Ul AbideenNessuna valutazione finora
- Cascadia HVAC Operation Part OneDocumento1 paginaCascadia HVAC Operation Part OneDonald Charles FernoughtyNessuna valutazione finora
- CMC in CAN NetworksDocumento7 pagineCMC in CAN NetworksZhang EnjuneNessuna valutazione finora
- Adn004 PDFDocumento2 pagineAdn004 PDFJosé AdelinoNessuna valutazione finora
- PSP Assignment1 MzeeshanDocumento11 paginePSP Assignment1 MzeeshanMuhammad ZeeshanNessuna valutazione finora
- Can BusDocumento56 pagineCan BusCáceres Martinez Arnol TadeoNessuna valutazione finora
- A High Reliability Control SystemDocumento3 pagineA High Reliability Control SystemAjai Kumar MedhaviNessuna valutazione finora
- Series C: From 10 To 60 kVADocumento20 pagineSeries C: From 10 To 60 kVAOleg KuryanNessuna valutazione finora
- 15-Troubleshooting CAN Data Links Using Fluke 123 ScopemeterDocumento11 pagine15-Troubleshooting CAN Data Links Using Fluke 123 Scopemeterзавир мансуровNessuna valutazione finora
- Report PDFDocumento40 pagineReport PDFrakshit KandpalNessuna valutazione finora
- Design and Research On Air Conditioning Control Network of Electric Vehicle Based On CAN-busDocumento4 pagineDesign and Research On Air Conditioning Control Network of Electric Vehicle Based On CAN-busSabriNessuna valutazione finora
- (Accredited by NAACA+, Affiliated To JNTUH HYDERABAD Review of Internship Presentation ONDocumento17 pagine(Accredited by NAACA+, Affiliated To JNTUH HYDERABAD Review of Internship Presentation ONJinugu VarunNessuna valutazione finora
- MultipleDocumento7 pagineMultipleMiguel Angel RodriguezNessuna valutazione finora
- TIDA-020019 Automotive Isolated CAN and Power Front End Reference DesignDocumento18 pagineTIDA-020019 Automotive Isolated CAN and Power Front End Reference DesignEng-emad ElzorcanyNessuna valutazione finora
- The Implementation of CAN Bus Network of PLC Based On ARMDocumento3 pagineThe Implementation of CAN Bus Network of PLC Based On ARMNitin ChavanNessuna valutazione finora
- Module Communication NetworkDocumento1 paginaModule Communication NetworkRichard Andrianjaka LuckyNessuna valutazione finora
- Can BusDocumento30 pagineCan Busrodolfof_31100% (1)
- CAN BusDocumento11 pagineCAN BusDragan Lugonić100% (1)
- Scada/Ems Systems - Hierarchy &: by AGMDocumento38 pagineScada/Ems Systems - Hierarchy &: by AGMLD&C ULDCNessuna valutazione finora
- In Ge Cmd5b4xxxnetDocumento11 pagineIn Ge Cmd5b4xxxnetMuhammad azeemNessuna valutazione finora
- Wireless Controller Area Network For In-Vehicle CommunicationDocumento5 pagineWireless Controller Area Network For In-Vehicle CommunicationArond MiteNessuna valutazione finora
- Advanced PIC18 Projects-CAN Bus ProjectsDocumento40 pagineAdvanced PIC18 Projects-CAN Bus ProjectsManu ManuNessuna valutazione finora
- CAN-BUS Basics enDocumento12 pagineCAN-BUS Basics enitalo filiberto100% (1)
- DC Lab ManualDocumento27 pagineDC Lab ManualKhushboo ManchandaNessuna valutazione finora
- Can Bus (Controller Area Network)Documento7 pagineCan Bus (Controller Area Network)sparkcar764Nessuna valutazione finora
- E85005-0127 - Auxiliary Power SupplyDocumento4 pagineE85005-0127 - Auxiliary Power SupplyEduardo LópezNessuna valutazione finora
- SN65HVD1050DR Texas InstrumentsDocumento21 pagineSN65HVD1050DR Texas InstrumentsMoises HernandezNessuna valutazione finora
- CAN Bus Explained - A Simple Intro (2023) - CSS ElectronicsDocumento20 pagineCAN Bus Explained - A Simple Intro (2023) - CSS ElectronicsGhiban ConstantinNessuna valutazione finora
- Auxiliary Power Supplies: Aps6A, Aps10ADocumento4 pagineAuxiliary Power Supplies: Aps6A, Aps10AJosé Alberto Ayala SantosNessuna valutazione finora
- CA - CAN Communication Mazda PDFDocumento85 pagineCA - CAN Communication Mazda PDFSoluciones Mecanicas La FloridaNessuna valutazione finora
- Toyoya - Yaris-TMC LHD Models - 2011Documento1 paginaToyoya - Yaris-TMC LHD Models - 2011Mauricio arevaloNessuna valutazione finora
- 3g ProjectDocumento65 pagine3g Projecteng_ahmedhamed100% (5)
- ND-12.007.01 CAMAC CC NORD-10 CAMAC Crate NORD-10 Interface General InformationDocumento32 pagineND-12.007.01 CAMAC CC NORD-10 CAMAC Crate NORD-10 Interface General InformationGöran AxelssonNessuna valutazione finora
- BCM Ds v1213r2Documento4 pagineBCM Ds v1213r2Asad NizamNessuna valutazione finora
- Can BusDocumento34 pagineCan Bushneto1975100% (4)
- lp384d26 125&500 Vehicle Test ProcedureDocumento15 paginelp384d26 125&500 Vehicle Test ProcedureMartin BoianiNessuna valutazione finora
- ECOMDocumento4 pagineECOMSK CCNessuna valutazione finora
- CAN BUS IntroductionDocumento34 pagineCAN BUS Introductionpatricio castro artigaNessuna valutazione finora
- Can - Spec SheetDocumento3 pagineCan - Spec Sheetyovel.rajaNessuna valutazione finora
- 1969 Rockefeller - Fault Protection With A Digital Computer PDFDocumento27 pagine1969 Rockefeller - Fault Protection With A Digital Computer PDFOmar Chayña VelásquezNessuna valutazione finora
- Ecm HyundaiDocumento17 pagineEcm HyundaiJose Fco. Aleman ArriagaNessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Nessuna valutazione finora
- Resume 1 Page RamDocumento1 paginaResume 1 Page RamRamnarayan ShreyasNessuna valutazione finora
- Professor Manihar THESISDocumento183 pagineProfessor Manihar THESISSatyabhama SanasamNessuna valutazione finora
- Fuse Holder - BussmannDocumento58 pagineFuse Holder - BussmannBhima LaksonoNessuna valutazione finora
- Complete Intro To Fire Detectors v2-1Documento38 pagineComplete Intro To Fire Detectors v2-1Remus BobeNessuna valutazione finora
- USB 3.1 Specification Language Usage Guidelines From USB-IFDocumento2 pagineUSB 3.1 Specification Language Usage Guidelines From USB-IFsorin-it100% (1)
- Phy Ip For Pcie 3.0Documento2 paginePhy Ip For Pcie 3.0uparashar1Nessuna valutazione finora
- Exp 8 ArduinoDocumento6 pagineExp 8 ArduinoMohamed TalebNessuna valutazione finora
- FDAS Technical Data SheetsDocumento6 pagineFDAS Technical Data SheetsPhel FloresNessuna valutazione finora
- Instrumentation (Chapter 2)Documento7 pagineInstrumentation (Chapter 2)Yab TadNessuna valutazione finora
- Ads 1298Documento87 pagineAds 1298Rui AllesNessuna valutazione finora
- Stabila 196-2 Elettronica ENDocumento22 pagineStabila 196-2 Elettronica ENJohn WalesNessuna valutazione finora
- Silo Weight & Volume CalculationDocumento18 pagineSilo Weight & Volume CalculationYogesh PatilNessuna valutazione finora
- Brocade Bottel Neck CMDDocumento32 pagineBrocade Bottel Neck CMDragservNessuna valutazione finora
- Catalogue SGF Eng PDFDocumento8 pagineCatalogue SGF Eng PDFrimce77Nessuna valutazione finora
- Craftsman 98023 40V 12V Lithium-Ion Cordless ChainsawDocumento6 pagineCraftsman 98023 40V 12V Lithium-Ion Cordless ChainsawJoe ZhaoNessuna valutazione finora
- Plug Power Supply: MCPLG SeriesDocumento3 paginePlug Power Supply: MCPLG SerieswisnuNessuna valutazione finora
- E7520 E7320 Chipsets BriefDocumento4 pagineE7520 E7320 Chipsets BriefJhon ErickNessuna valutazione finora
- Survey & Mitigation: Who We Are & What We DoDocumento5 pagineSurvey & Mitigation: Who We Are & What We DorustyNessuna valutazione finora
- B 783 INSUFFLATOR HighFlow45 VII13 enDocumento4 pagineB 783 INSUFFLATOR HighFlow45 VII13 enRuban RajNessuna valutazione finora
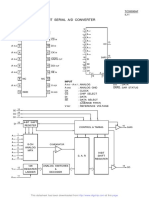
- C-Mos 8-Channel 8-Bit Serial A/D Converter: 9 7 6 5 4 3 2 1 A A A A A A A A 15 DODocumento1 paginaC-Mos 8-Channel 8-Bit Serial A/D Converter: 9 7 6 5 4 3 2 1 A A A A A A A A 15 DOAsep TatangNessuna valutazione finora
- K To 12 ICT - Computer Systems Servicing (NC II) Curriculum Guide May 2016 LO - Learning Outcome ofDocumento2 pagineK To 12 ICT - Computer Systems Servicing (NC II) Curriculum Guide May 2016 LO - Learning Outcome ofFroz WorksNessuna valutazione finora
- Datasheet PDFDocumento10 pagineDatasheet PDFRi Cha RdNessuna valutazione finora
- OBJECTIVE TYPE QUESTIONS AND ANSWERS FOR ETO - Electro Technical OfficerDocumento39 pagineOBJECTIVE TYPE QUESTIONS AND ANSWERS FOR ETO - Electro Technical Officeramit100% (2)
- Technical Specification For Isolators: Odisha Power Transmission Corporation LimitedDocumento15 pagineTechnical Specification For Isolators: Odisha Power Transmission Corporation LimitedRAKESH CHANDRA PATRANessuna valutazione finora
- f13 User Manual Micro Touch 1300Documento104 paginef13 User Manual Micro Touch 1300Kouame FrancisNessuna valutazione finora
- Buck Converter Efficiency App-EDocumento16 pagineBuck Converter Efficiency App-EmehdiNessuna valutazione finora
- 1KHA001193-En Technical Data ETL600 R4 (Oct. 2012)Documento4 pagine1KHA001193-En Technical Data ETL600 R4 (Oct. 2012)Salvador FayssalNessuna valutazione finora
- SAJ General Purpose VFD CatalogueDocumento16 pagineSAJ General Purpose VFD CatalogueOdali BatistaNessuna valutazione finora