Potrebbero piacerti anche
- Brushless DC Electric MotorDocumento7 pagineBrushless DC Electric Motorايسر عليويNessuna valutazione finora
- Brushless DC Electric MotorDocumento8 pagineBrushless DC Electric MotorAngel VelasquezNessuna valutazione finora
- Brushless DC Electric MotorDocumento8 pagineBrushless DC Electric MotorankitNessuna valutazione finora
- New Microsoft Word DocumentDocumento5 pagineNew Microsoft Word DocumentraviNessuna valutazione finora
- Electric MotorsDocumento16 pagineElectric MotorsReszler ArnoldNessuna valutazione finora
- Principles of DC MotorsDocumento14 paginePrinciples of DC MotorsAravind Raj PandianNessuna valutazione finora
- Reluctance Motor: University of The Philippines Los Baños, Laguna AY 2010-2011Documento16 pagineReluctance Motor: University of The Philippines Los Baños, Laguna AY 2010-2011Dela Cruz リッチェルNessuna valutazione finora
- Commutator (Electric) : From Wikipedia, The Free EncyclopediaDocumento12 pagineCommutator (Electric) : From Wikipedia, The Free EncyclopediaEdito Abrantes BalugoNessuna valutazione finora
- Brushed DC Electric Motor - WikipediaDocumento63 pagineBrushed DC Electric Motor - WikipediaKISHORE PERUMALLANessuna valutazione finora
- Physics ProDocumento21 paginePhysics ProjayanthiNessuna valutazione finora
- Electrical MachinesDocumento7 pagineElectrical Machinesusama jabbarNessuna valutazione finora
- Peres 10PPS103 2 Electrical Machines PDFDocumento71 paginePeres 10PPS103 2 Electrical Machines PDFThanigaivel RajaNessuna valutazione finora
- PM BDC Motor - For MinorDocumento13 paginePM BDC Motor - For MinorVaibhav KhokharNessuna valutazione finora
- AC Commutator Motors Repulsion Series Motor UniversalDocumento3 pagineAC Commutator Motors Repulsion Series Motor UniversalwhrferNessuna valutazione finora
- Brushed DC MotorDocumento6 pagineBrushed DC MotorPrakhar AgrawalNessuna valutazione finora
- The Basic DC MotorDocumento22 pagineThe Basic DC MotortamilselviNessuna valutazione finora
- DC MotorsDocumento12 pagineDC MotorsJamie Ray DalisayNessuna valutazione finora
- Brushless DC MotorsDocumento7 pagineBrushless DC MotorsRonald LugwireNessuna valutazione finora
- Robotic Trolley For Material HandlingDocumento46 pagineRobotic Trolley For Material HandlingSaggy ChhataniNessuna valutazione finora
- Brushed DC Electric MotorDocumento14 pagineBrushed DC Electric MotorSadeep MadhushanNessuna valutazione finora
- PMBLDCDocumento25 paginePMBLDCYash DeoliaNessuna valutazione finora
- Assignment 2 Ac DCDocumento15 pagineAssignment 2 Ac DCVincoy JohnlloydNessuna valutazione finora
- Brushless DC MotorsDocumento8 pagineBrushless DC MotorsSondur LohithNessuna valutazione finora
- DC MotorsDocumento12 pagineDC Motorsmuletola7Nessuna valutazione finora
- Reaction PaperDocumento6 pagineReaction PaperAngelo Escoro Dante100% (1)
- Electrical Generators PDFDocumento71 pagineElectrical Generators PDFchaithra hsNessuna valutazione finora
- Simple Two-Pole DC Motor: BrushedDocumento10 pagineSimple Two-Pole DC Motor: BrushedanupthattaNessuna valutazione finora
- Projet Report ACDC-1Documento9 pagineProjet Report ACDC-1saqib khalidNessuna valutazione finora
- Armature ReactionDocumento3 pagineArmature Reactionb14.00010.20Nessuna valutazione finora
- Assignment 2 Ac DCDocumento15 pagineAssignment 2 Ac DCVincoy JohnlloydNessuna valutazione finora
- Electric Drives - DC Motors (Description and Applications) : Brushed (Field Energised) Motors (Motors Using Wound Rotors)Documento6 pagineElectric Drives - DC Motors (Description and Applications) : Brushed (Field Energised) Motors (Motors Using Wound Rotors)Vasudev SurendranNessuna valutazione finora
- What Is DC MotorDocumento38 pagineWhat Is DC Motoralvin dalumpinesNessuna valutazione finora
- Brushless DC Motor Working Principle and ApplicationsDocumento6 pagineBrushless DC Motor Working Principle and ApplicationsMd Samee MNessuna valutazione finora
- Lec # 24 Universal MotorsDocumento15 pagineLec # 24 Universal MotorsBuriro HayatNessuna valutazione finora
- Disadvantages of Armature Resistence Control: What Is The Function of Commutator?Documento4 pagineDisadvantages of Armature Resistence Control: What Is The Function of Commutator?SovanNessuna valutazione finora
- COMMUTATION IN A DC MOTOR Is The Process of Reversing Armature Current at The Moment When Unlike Poles of The ArmatureDocumento3 pagineCOMMUTATION IN A DC MOTOR Is The Process of Reversing Armature Current at The Moment When Unlike Poles of The ArmatureMichael MontinolaNessuna valutazione finora
- Assignment # 6Documento7 pagineAssignment # 6Jay Ey100% (1)
- Solar Grass Cutter With Linear Blades by Using Scotch Yoke MechanismDocumento38 pagineSolar Grass Cutter With Linear Blades by Using Scotch Yoke MechanismAakash DindigulNessuna valutazione finora
- Scotch Yoke MechanismDocumento37 pagineScotch Yoke MechanismSaravanan Viswakarma100% (1)
- Brushless DC Electric Motor PDFDocumento6 pagineBrushless DC Electric Motor PDFAsif MudgalNessuna valutazione finora
- A PM Motor Does Not Have A Field Winding On The Stator FrameDocumento4 pagineA PM Motor Does Not Have A Field Winding On The Stator FrameAnfield FaithfulNessuna valutazione finora
- Project On DC MotorDocumento18 pagineProject On DC MotorSourav Deb RoyNessuna valutazione finora
- DC MotorDocumento3 pagineDC MotorAhmad AzizudinNessuna valutazione finora
- Brushless DC Motor ReportDocumento2 pagineBrushless DC Motor ReportAnonymous 7Q1NIANessuna valutazione finora
- Permanent Magnet MotorsDocumento36 paginePermanent Magnet MotorskkarthiksNessuna valutazione finora
- Multipurpose Machines Using Scotch Yoke MechanismDocumento36 pagineMultipurpose Machines Using Scotch Yoke Mechanismnithinkenator88% (16)
- Lab Rep DraftDocumento5 pagineLab Rep DraftKent Orriele FadriquelNessuna valutazione finora
- DC MotorDocumento6 pagineDC MotorUjjawal ParasarNessuna valutazione finora
- Dot 1Documento5 pagineDot 1Thomas Nathaniel AngNessuna valutazione finora
- TechportDocumento6 pagineTechportMaureen TatadNessuna valutazione finora
- Direct Current MotorDocumento5 pagineDirect Current Motorjamesbergano18Nessuna valutazione finora
- Universal MotorDocumento5 pagineUniversal MotorMUHAMMED SNessuna valutazione finora
- DC Motor Hard Copy ReportDocumento13 pagineDC Motor Hard Copy ReportShang Divina Ebrada100% (1)
- Type of NC SystemDocumento20 pagineType of NC Systemamit kumarNessuna valutazione finora
- Hercules M. Biacoraelectrical-MachinesDocumento8 pagineHercules M. Biacoraelectrical-MachinesBiacora Manalo HerculesNessuna valutazione finora
- Electric Motor Working PrincipleDocumento17 pagineElectric Motor Working PrincipleJeovanie DiosesNessuna valutazione finora
- Brushless DC Servo Meter Ec To StudyDocumento5 pagineBrushless DC Servo Meter Ec To StudyMystic MoonNessuna valutazione finora
- Fina - Ut-5 SSDDocumento71 pagineFina - Ut-5 SSDPrabhu KpNessuna valutazione finora
- Tugas AjaDocumento4 pagineTugas AjaIka Bayu RamadhanaNessuna valutazione finora
- SA-150, SA-300 Series Pure Sine Wave Inverter User's ManualDocumento15 pagineSA-150, SA-300 Series Pure Sine Wave Inverter User's Manualsofia hernandezNessuna valutazione finora
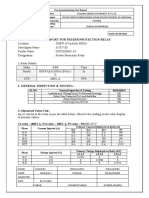
- Test Report For Feeder Protection RelayDocumento3 pagineTest Report For Feeder Protection RelayHari haranNessuna valutazione finora
- 6.6 Wiring Diagram 6.6.1 Version GCP-20 & AMG 3/NEBDocumento1 pagina6.6 Wiring Diagram 6.6.1 Version GCP-20 & AMG 3/NEBscribdkhatnNessuna valutazione finora
- Solid State Electronic Devices - D. K. Bhattacharya and R. Sharma PDFDocumento94 pagineSolid State Electronic Devices - D. K. Bhattacharya and R. Sharma PDFSusmita GangulyNessuna valutazione finora
- Current BrochureDocumento6 pagineCurrent BrochureKym GilhamNessuna valutazione finora
- S 1493Documento2 pagineS 1493alls2011Nessuna valutazione finora
- Chloride CROSS Chassis/Cabinet: STS CatalogueDocumento16 pagineChloride CROSS Chassis/Cabinet: STS CatalogueALEX ALEXNessuna valutazione finora
- TCL Tmpa8859 T-68T17Documento44 pagineTCL Tmpa8859 T-68T17Mahsun Elvirgo SesNessuna valutazione finora
- Experiment No.:: AIM: To Study and Compare The Characteristics of PN Junction Diode and Zener DiodeDocumento3 pagineExperiment No.:: AIM: To Study and Compare The Characteristics of PN Junction Diode and Zener DiodeMusical FusionNessuna valutazione finora
- Appendix A Chart LogicDocumento6 pagineAppendix A Chart LogicAnonymous ep7LE5ZdP5Nessuna valutazione finora
- Miniature FusesDocumento88 pagineMiniature FusesEliasNessuna valutazione finora
- History of Semi-Conductor DevicesDocumento6 pagineHistory of Semi-Conductor DevicesJulio SternNessuna valutazione finora
- CM200DY-24H: Mitsubishi Igbt ModulesDocumento5 pagineCM200DY-24H: Mitsubishi Igbt ModulesIlian AvramovNessuna valutazione finora
- P1300C Usen PDFDocumento56 pagineP1300C Usen PDFJUANNessuna valutazione finora
- 3DB28458AAAATNZZA01 - V1 - Wavence UBT-S UBT-T Quick Start GuideDocumento2 pagine3DB28458AAAATNZZA01 - V1 - Wavence UBT-S UBT-T Quick Start GuideАндрей Николаев100% (1)
- EE213 Applied Electrical Engineering: Fall 2020 Mazhar JavedDocumento18 pagineEE213 Applied Electrical Engineering: Fall 2020 Mazhar JavedElbert VonVerimNessuna valutazione finora
- Reviewer For RmeDocumento82 pagineReviewer For RmeJaymar Agustin Agor100% (1)
- Servo Motors: Tuning-Free NX SeriesDocumento32 pagineServo Motors: Tuning-Free NX SeriesBehnamNessuna valutazione finora
- L6234 3 Fazlı Motor SürücüDocumento10 pagineL6234 3 Fazlı Motor SürücüEngin UzunNessuna valutazione finora
- Motor Perforacion General ElectricDocumento1 paginaMotor Perforacion General ElectricJesus SanchezNessuna valutazione finora
- Brosur AESCULAP HF Unit Neurosurgery SetDocumento3 pagineBrosur AESCULAP HF Unit Neurosurgery SetIqbal Dian FirdausNessuna valutazione finora
- Nte 201-300Documento11 pagineNte 201-300api-242591736Nessuna valutazione finora
- Basic Energy Meters (EMS-Series)Documento3 pagineBasic Energy Meters (EMS-Series)Jaskaran SinghNessuna valutazione finora
- DatasheetDocumento7 pagineDatasheetDarica Andojar TaparNessuna valutazione finora
- Merrychef 402s ManualDocumento56 pagineMerrychef 402s ManualJames BondelNessuna valutazione finora
- Basic Electronics Presentation v2Documento25 pagineBasic Electronics Presentation v2MebreNessuna valutazione finora
- Sucofeed RF Cables H&SDocumento12 pagineSucofeed RF Cables H&SRahul GoudNessuna valutazione finora
- VOL 2 SEC 3 1 - SCOPE OF WORKS Rev 2 PDFDocumento189 pagineVOL 2 SEC 3 1 - SCOPE OF WORKS Rev 2 PDFsivaguruk250% (2)
- "Gas Insulated Substation: An Overview": Powergrid Corporation of India LimitedDocumento35 pagine"Gas Insulated Substation: An Overview": Powergrid Corporation of India LimitedSaurabh KumarNessuna valutazione finora
- HTB1KrKMHVXXXXaEXXXX PRXFXXXyDocumento3 pagineHTB1KrKMHVXXXXaEXXXX PRXFXXXyMashtu94Nessuna valutazione finora