Potrebbero piacerti anche
- Métodos Matriciales para ingenieros con MATLABDa EverandMétodos Matriciales para ingenieros con MATLABValutazione: 5 su 5 stelle5/5 (1)
- Cap N 01 - Ingenieria MantenimientoDocumento19 pagineCap N 01 - Ingenieria Mantenimientosalvador ayalaNessuna valutazione finora
- Desarrollo de Ejercicios de Teoria de ControlDocumento24 pagineDesarrollo de Ejercicios de Teoria de ControlDaniel Molina100% (3)
- Ecuaciones para Segundo Grado de PrimariaDocumento20 pagineEcuaciones para Segundo Grado de PrimariaRocio Isabel Moran FernandezNessuna valutazione finora
- Actividad 2 - UII - Curvas de Nivel y Derivacion Implicita JMDocumento4 pagineActividad 2 - UII - Curvas de Nivel y Derivacion Implicita JMFernando Solis0% (1)
- Observador Sistema Hidraulico Orden3Documento14 pagineObservador Sistema Hidraulico Orden3Arturo CMNessuna valutazione finora
- Convolucion de Funciones DiscretasDocumento22 pagineConvolucion de Funciones DiscretasAmabiles nuezNessuna valutazione finora
- Álgebra 2. Actividades - IntelectumDocumento112 pagineÁlgebra 2. Actividades - IntelectumAnonymous BF5Yex100% (5)
- Condensacion EstaticaDocumento10 pagineCondensacion EstaticaLuis Ypanaque TinedoNessuna valutazione finora
- S3 - Funcion-De Transferencia Pulso - Lazo Abierto-CerradoDocumento34 pagineS3 - Funcion-De Transferencia Pulso - Lazo Abierto-CerradoSebastian Sotelo100% (1)
- Observadores de Orden ReducidoDocumento24 pagineObservadores de Orden ReducidoHernan AvilaNessuna valutazione finora
- Diseño de ServosistemasDocumento32 pagineDiseño de ServosistemasJean Pierre Alcantara AlvaradoNessuna valutazione finora
- Regulador Lineal Cuadrático OptimoDocumento7 pagineRegulador Lineal Cuadrático OptimoBru Cervantes AnayaNessuna valutazione finora
- MT227B Unidad 3a Controladores de Estado y Sistemas de Seguimiento 2022-1 v2Documento60 pagineMT227B Unidad 3a Controladores de Estado y Sistemas de Seguimiento 2022-1 v2Gabriel JGNessuna valutazione finora
- Deber 1Documento14 pagineDeber 1Alex PintadoNessuna valutazione finora
- Sistema Péndulo CarretillaDocumento17 pagineSistema Péndulo CarretillaJosé MartínezNessuna valutazione finora
- Variables de Estado de Sistemas DinámicosDocumento16 pagineVariables de Estado de Sistemas DinámicosJosue Israel MendozaNessuna valutazione finora
- AyCP Ejercicios Tema1 SOLUCIONES 2020Documento18 pagineAyCP Ejercicios Tema1 SOLUCIONES 2020peposasunaNessuna valutazione finora
- 07-Control de Un Sistema de Levitación Magnética Utilizando Técnicas de Realimentación Del EstadoDocumento15 pagine07-Control de Un Sistema de Levitación Magnética Utilizando Técnicas de Realimentación Del EstadoMarlonNessuna valutazione finora
- SCII IF7 Sánchez y VillanuevaDocumento8 pagineSCII IF7 Sánchez y Villanuevadsd100% (1)
- VG DDDocumento24 pagineVG DDKevin RojasNessuna valutazione finora
- Portafolio Brance Torres Control IIDocumento17 paginePortafolio Brance Torres Control IIPablo RamirezNessuna valutazione finora
- Examen Robotica Unidad3Documento10 pagineExamen Robotica Unidad3alejandrocamposgarcia777Nessuna valutazione finora
- Laboratorio N°11Documento7 pagineLaboratorio N°11Didier HernándezNessuna valutazione finora
- Medi2 U3 A3 V1Documento6 pagineMedi2 U3 A3 V1Norberto FerralesNessuna valutazione finora
- MT227 Unidad 3a Controladores de Estado 2021-2Documento58 pagineMT227 Unidad 3a Controladores de Estado 2021-2Leugim Escalante LLanosNessuna valutazione finora
- Modelado de Motores CCDocumento14 pagineModelado de Motores CCKevin Pato MosqueraNessuna valutazione finora
- Separatas Ingenieria de Control 4Documento32 pagineSeparatas Ingenieria de Control 4rullitoNessuna valutazione finora
- Jácome - Deber 2Documento5 pagineJácome - Deber 2Juan Francisco JácomeNessuna valutazione finora
- Dise o de Controlador Por Realimentaci N de Estados 1701388552Documento13 pagineDise o de Controlador Por Realimentaci N de Estados 1701388552Juan Cristobal Rivera PuellesNessuna valutazione finora
- MT227 P4 2017 1 SolucionarioDocumento9 pagineMT227 P4 2017 1 SolucionarioKendrick TeodorNessuna valutazione finora
- Solucionario Ef-Ee615m 2020 1Documento4 pagineSolucionario Ef-Ee615m 2020 1Anthony A NavarroNessuna valutazione finora
- Controladores y Compensadores Con OPAMPDocumento22 pagineControladores y Compensadores Con OPAMPLeonel Antonio RomeroNessuna valutazione finora
- 3 - Diseño Del Sistema de ControlDocumento14 pagine3 - Diseño Del Sistema de ControlJosueNessuna valutazione finora
- MÉTODOS Lab N° 7Documento8 pagineMÉTODOS Lab N° 7NOEMI SANDRA ESTEBAN SANTIAGONessuna valutazione finora
- YA - PDF - WORD - Informe Sobre El Control PID de Un Motor DCDocumento21 pagineYA - PDF - WORD - Informe Sobre El Control PID de Un Motor DCtesla doceNessuna valutazione finora
- EDP MatlabDocumento4 pagineEDP MatlabAlex PrunaNessuna valutazione finora
- 1.7.-Controladores y Compensadores Con OPAMPDocumento22 pagine1.7.-Controladores y Compensadores Con OPAMPHP_PaulNessuna valutazione finora
- Definiciones de Distintos Tipos de Sistemas MatematicosDocumento21 pagineDefiniciones de Distintos Tipos de Sistemas MatematicosAugusto LismayesNessuna valutazione finora
- S11 Observador de EstadoDocumento38 pagineS11 Observador de EstadoEmirEstefanoPandalZavaletaNessuna valutazione finora
- Formulas M.M.SDocumento4 pagineFormulas M.M.SRuben Lopez RicoNessuna valutazione finora
- Tercer Parcial de Metodos Numericos 2011 RKDocumento6 pagineTercer Parcial de Metodos Numericos 2011 RKJerson Torres CardenasNessuna valutazione finora
- DM Ejerc 2Documento43 pagineDM Ejerc 2ANGEL FERNANDO RUIZ ALARCONNessuna valutazione finora
- Laboratorio Final#2 Control DigitalDocumento13 pagineLaboratorio Final#2 Control DigitalMichel Perez CamargoNessuna valutazione finora
- TORA SystemDocumento8 pagineTORA SystemFer HernándezNessuna valutazione finora
- Práctica 2,2Documento11 paginePráctica 2,2JHON LUIS VALDEZ AGUIRRENessuna valutazione finora
- Salazar Evelyn Informe1.1 10006Documento17 pagineSalazar Evelyn Informe1.1 10006Evelyn SalazarNessuna valutazione finora
- Asignación Simulink - Ismael PalmaDocumento23 pagineAsignación Simulink - Ismael PalmaVictorNessuna valutazione finora
- Ejercicio 5 Lab Dinámica y VibracionesDocumento10 pagineEjercicio 5 Lab Dinámica y VibracionesBekiita Alexa SeguraNessuna valutazione finora
- LienalizacionDocumento39 pagineLienalizacionPieraNessuna valutazione finora
- PC4 Ee648 Fiee UniDocumento2 paginePC4 Ee648 Fiee UniDavidNessuna valutazione finora
- Vector Tangente Normal BinormalDocumento9 pagineVector Tangente Normal BinormalpepeNessuna valutazione finora
- Uso de La Transformada "Z". Cálculo Analítico y Con MatlabDocumento20 pagineUso de La Transformada "Z". Cálculo Analítico y Con MatlabVictor CondoriNessuna valutazione finora
- EVALUACION 2-Controladores-IndustrialesDocumento9 pagineEVALUACION 2-Controladores-IndustrialesAlexis JavierNessuna valutazione finora
- Problemas de Ingenieria de Control IDocumento11 pagineProblemas de Ingenieria de Control IAnonymous AUTTUBNessuna valutazione finora
- Laboratorio #3-SeñalesDocumento5 pagineLaboratorio #3-SeñalesValentina PortillaNessuna valutazione finora
- Diseño de Sistemas Reguladores ObservaDocumento22 pagineDiseño de Sistemas Reguladores ObservaJean Pierre Alcantara AlvaradoNessuna valutazione finora
- MT227B Unidad 2a Respuesta Temporal de Sistemas Fisicos Modelados en EE 2022-1Documento61 pagineMT227B Unidad 2a Respuesta Temporal de Sistemas Fisicos Modelados en EE 2022-1Gabriel JGNessuna valutazione finora
- SEGURAMIENTO Y CONTROL CALIDAD - METAL MECANICA - Rev0Documento1 paginaSEGURAMIENTO Y CONTROL CALIDAD - METAL MECANICA - Rev0salvador ayalaNessuna valutazione finora
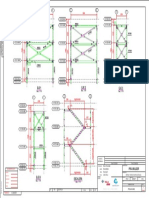
- Eje 1 Eje 2 Eje C: W8X24 WT4X9 W8X24Documento1 paginaEje 1 Eje 2 Eje C: W8X24 WT4X9 W8X24salvador ayalaNessuna valutazione finora
- MT227 Unidad 2b Formas Canónicas - Controlabilidad y Observabilidad 2018-1Documento40 pagineMT227 Unidad 2b Formas Canónicas - Controlabilidad y Observabilidad 2018-1salvador ayalaNessuna valutazione finora
- Cap #03-TRIBOLOGIADocumento40 pagineCap #03-TRIBOLOGIAsalvador ayalaNessuna valutazione finora
- Teoría de La Capa Límite PDFDocumento9 pagineTeoría de La Capa Límite PDFsalvador ayalaNessuna valutazione finora
- Unidad 3 Tarea 3 - Problema 2Documento11 pagineUnidad 3 Tarea 3 - Problema 2ximena suarezNessuna valutazione finora
- 2-Sistemas de Los Números RealesDocumento21 pagine2-Sistemas de Los Números RealesCarlos BenitezNessuna valutazione finora
- Guía 3 de AlgebraDocumento5 pagineGuía 3 de AlgebraBenjamin FosterNessuna valutazione finora
- Vectores y FactorialesDocumento17 pagineVectores y FactorialesJose Rafael Lugo PerezNessuna valutazione finora
- Taller 3 PDFDocumento26 pagineTaller 3 PDFDaniel Antonio Vanegas CanoNessuna valutazione finora
- Numeros ComplejosDocumento6 pagineNumeros ComplejosMelitón Ariel Elgueta100% (1)
- CV Deber 9Documento2 pagineCV Deber 9Кими БенальказарNessuna valutazione finora
- Sistemas LTI 2 PDFDocumento2 pagineSistemas LTI 2 PDFErikNessuna valutazione finora
- Cap V SIMPLEX MINimizacionDocumento27 pagineCap V SIMPLEX MINimizacionLoad Ulises Retete RiveraNessuna valutazione finora
- Examen U1-RepresentacionesDocumento4 pagineExamen U1-RepresentacionesMalú EspinozaNessuna valutazione finora
- Guia de Trabajo 1 Aritmética 7ºDocumento13 pagineGuia de Trabajo 1 Aritmética 7ºCarlos PerezNessuna valutazione finora
- Portafolio CurriculoDocumento20 paginePortafolio CurriculoDiego Armando Díaz AlvaradoNessuna valutazione finora
- X S10 Polinomios PDFDocumento7 pagineX S10 Polinomios PDFRicardoNessuna valutazione finora
- Algunos Límites de Una VariableDocumento3 pagineAlgunos Límites de Una VariableAlexisGrlscz100% (3)
- 02 Eso2Documento9 pagine02 Eso2phineasNessuna valutazione finora
- Ecuaciones - Resolución de EcuacionesDocumento2 pagineEcuaciones - Resolución de Ecuaciones01-IC-HU-ANGELA ESPINOZA ENRIQUEZNessuna valutazione finora
- EDM-102 Matematica IIDocumento4 pagineEDM-102 Matematica IIJohan CarrascoNessuna valutazione finora
- Apuntes, Folleto Números Reales PDFDocumento47 pagineApuntes, Folleto Números Reales PDFChristian TorresNessuna valutazione finora
- Repaso AlgebraDocumento3 pagineRepaso AlgebraT4T RExxxNessuna valutazione finora
- Taller SustitucionDocumento5 pagineTaller SustitucionCristian David Quintero CurveloNessuna valutazione finora
- Actividad5 Álgebra SuperiorDocumento7 pagineActividad5 Álgebra SuperiorOscar DaliNessuna valutazione finora
- Unidad 1 - Solución Caso Practico - Matemáticas AplicadasDocumento8 pagineUnidad 1 - Solución Caso Practico - Matemáticas AplicadasJulio César Betin Arce100% (1)
- Funcion PolyfitDocumento4 pagineFuncion PolyfitAngel PaguayNessuna valutazione finora
- Balanceo de Ecuaciones Por El Metodo de Gauss Jordan Metodo Algebraico PDFDocumento11 pagineBalanceo de Ecuaciones Por El Metodo de Gauss Jordan Metodo Algebraico PDFGisell DanielaNessuna valutazione finora
- Algebra Superior - Tarea - Semana - 6 - PDocumento5 pagineAlgebra Superior - Tarea - Semana - 6 - PRonald ValenciaNessuna valutazione finora