Potrebbero piacerti anche
- Homework 9. Solutions. 1. Find Coordinate Basis Vectors, First Quadratic Form, Unit Normal Vector Field, Shape Operator and GaussianDocumento8 pagineHomework 9. Solutions. 1. Find Coordinate Basis Vectors, First Quadratic Form, Unit Normal Vector Field, Shape Operator and GaussianKiprop VentureNessuna valutazione finora
- Transformation All Governing Equations in Rectangular Coordinates To Equations in Polar CoordinatesDocumento10 pagineTransformation All Governing Equations in Rectangular Coordinates To Equations in Polar CoordinatesabdulqaderNessuna valutazione finora
- sen (φ) r˙ φ ˆ φ sen (φ) −r˙ φ sen (φ) − 2r ˙ φ ˙ θ cos (φ) r¨ φ + 2 ˙r ˙ φ − r sen (φ) cos (φ) ˙ θ ˆ φDocumento4 paginesen (φ) r˙ φ ˆ φ sen (φ) −r˙ φ sen (φ) − 2r ˙ φ ˙ θ cos (φ) r¨ φ + 2 ˙r ˙ φ − r sen (φ) cos (φ) ˙ θ ˆ φJefersonNessuna valutazione finora
- Polar GradientDocumento1 paginaPolar GradientRamon ConpeNessuna valutazione finora
- Chapter 3 SolutionsDocumento45 pagineChapter 3 SolutionsKavya SelvarajNessuna valutazione finora
- Advanced quantum mechanics problem sheet 2Documento3 pagineAdvanced quantum mechanics problem sheet 2wem qiaoNessuna valutazione finora
- Solved Problems From GriffithsDocumento4 pagineSolved Problems From GriffithsTushti PatelNessuna valutazione finora
- Differentiation of Vectors: Solutions: Example 4.1Documento6 pagineDifferentiation of Vectors: Solutions: Example 4.1Dimas GunturNessuna valutazione finora
- Sol 3Documento8 pagineSol 3wem qiaoNessuna valutazione finora
- Cartesian and spherical coordinate systemsDocumento1 paginaCartesian and spherical coordinate systemsgayatri rainaNessuna valutazione finora
- Applications of CalculusDocumento11 pagineApplications of CalculusSiddharth AcharyaNessuna valutazione finora
- 2 B21 Sheet 9 ADocumento4 pagine2 B21 Sheet 9 ARoy VeseyNessuna valutazione finora
- Lessons 22-45Documento179 pagineLessons 22-45Shakeel NawazNessuna valutazione finora
- Vector Differentiation - Fall 20-21Documento33 pagineVector Differentiation - Fall 20-21RAFSUN MAHIDYNessuna valutazione finora
- Laboratorio N3Documento6 pagineLaboratorio N3juanNessuna valutazione finora
- 2.fluid Mechanics Overview Part IIDocumento30 pagine2.fluid Mechanics Overview Part II刘伟轩Nessuna valutazione finora
- Polar Coordinates Volume FormulasDocumento6 paginePolar Coordinates Volume Formulaswe_spidus_2006Nessuna valutazione finora
- 2014 Lecture 005 PDFDocumento48 pagine2014 Lecture 005 PDFeouahiauNessuna valutazione finora
- Physics 506: Problem Set 5: Due: October 13, 2014Documento3 paginePhysics 506: Problem Set 5: Due: October 13, 2014Ravi RoyNessuna valutazione finora
- Concentrated Load On A Wedge PDocumento27 pagineConcentrated Load On A Wedge PNaga Manikanta TatikondaNessuna valutazione finora
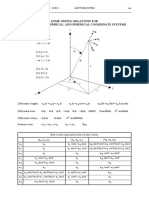
- Lecture Notes 2 - Useful Relations Cartesian, Cylindrical and Spherical CoordinatesDocumento5 pagineLecture Notes 2 - Useful Relations Cartesian, Cylindrical and Spherical CoordinatesKatherina PetersenNessuna valutazione finora
- Chapter 4 FDocumento13 pagineChapter 4 FZikri RizkiNessuna valutazione finora
- Gu Ia de Problemas de La Secci On 2.5 Del Libro Mathematical Methods For Physicists, Sixth Edition, de George ArfkenDocumento8 pagineGu Ia de Problemas de La Secci On 2.5 Del Libro Mathematical Methods For Physicists, Sixth Edition, de George ArfkenSergio AguilarNessuna valutazione finora
- S (U, V) (U V, U + V, U: Chapter 6: Surface IntegralsDocumento18 pagineS (U, V) (U V, U + V, U: Chapter 6: Surface IntegralsMariveluswamyNessuna valutazione finora
- Parte 10Documento7 pagineParte 10Elohim Ortiz CaballeroNessuna valutazione finora
- 1 Cylindrical and Spherical CoordinatesDocumento4 pagine1 Cylindrical and Spherical CoordinatesKshitijNessuna valutazione finora
- M340project Sacco MaddenDocumento6 pagineM340project Sacco MaddenDavid SaccoNessuna valutazione finora
- Cauchy's equations in coordinatesDocumento15 pagineCauchy's equations in coordinatessaikat07Nessuna valutazione finora
- PHD Lecture11 12Documento10 paginePHD Lecture11 12Roy VeseyNessuna valutazione finora
- Et - Emt Bee Ac Ms Edc Aet - Solution - 2553Documento33 pagineEt - Emt Bee Ac Ms Edc Aet - Solution - 2553pankaj chaurasiaNessuna valutazione finora
- Lect 35Documento11 pagineLect 35win alfalahNessuna valutazione finora
- Cartesian, Cylindrical Polar, and Spherical Polar CoordinatesDocumento2 pagineCartesian, Cylindrical Polar, and Spherical Polar Coordinatesjgra42Nessuna valutazione finora
- 2012EM8Documento35 pagine2012EM8Android EmailNessuna valutazione finora
- Real IntegralsDocumento5 pagineReal Integralsperlhacker_indoNessuna valutazione finora
- 2010 Lecture 005 PDFDocumento43 pagine2010 Lecture 005 PDFeouahiauNessuna valutazione finora
- 4.2.1 Equilibrium Equations in Polar CoordinatesDocumento6 pagine4.2.1 Equilibrium Equations in Polar CoordinatesShgoyal0073_Nessuna valutazione finora
- 1 Two and Three Dimensional ProblemsDocumento11 pagine1 Two and Three Dimensional Problemsgaurang agarwalNessuna valutazione finora
- 1 Two and Three Dimensional ProblemsDocumento4 pagine1 Two and Three Dimensional Problemsgaurang agarwalNessuna valutazione finora
- CXC CAPE Pure Mathematics Formulas SheetDocumento4 pagineCXC CAPE Pure Mathematics Formulas SheetFurret MasterNessuna valutazione finora
- TSE HW 1 Physics spherical coordinates divergence theoremDocumento3 pagineTSE HW 1 Physics spherical coordinates divergence theoremSam TseNessuna valutazione finora
- HW 3econ705Documento6 pagineHW 3econ705tualtuangNessuna valutazione finora
- FormulasDocumento1 paginaFormulasPancho MedinaNessuna valutazione finora
- DF Xy DF Xy Xy: 3 y Sec 9 y Tan +3x y SecDocumento5 pagineDF Xy DF Xy Xy: 3 y Sec 9 y Tan +3x y Secdavid echeverryNessuna valutazione finora
- Formula SheetDocumento4 pagineFormula SheetGeorge GavelNessuna valutazione finora
- Exercises Analysis 2 (2WA40) Lecture 22Documento2 pagineExercises Analysis 2 (2WA40) Lecture 22Andrei PatularuNessuna valutazione finora
- INTEGRALS IN SPHERICAL COORDINATESDocumento9 pagineINTEGRALS IN SPHERICAL COORDINATEShthaier4062Nessuna valutazione finora
- Math Review ME3700Documento8 pagineMath Review ME3700Jairo RondonNessuna valutazione finora
- FluxGausssolsDocumento9 pagineFluxGausssolsaakashbalaprajapathiofficialNessuna valutazione finora
- Tutorial v1Documento5 pagineTutorial v1Ram KumarNessuna valutazione finora
- Unit VDocumento36 pagineUnit Vapi-352822682100% (1)
- Orbits in Central Force Fields I: F (r) ρ (r) (r, θ) = F (r) ~ eDocumento24 pagineOrbits in Central Force Fields I: F (r) ρ (r) (r, θ) = F (r) ~ eगणित विषयNessuna valutazione finora
- Nonlinear PDEs and Legendre transformationsDocumento6 pagineNonlinear PDEs and Legendre transformationsPubavaNessuna valutazione finora
- Strauss PDEch 2 S 1 P 8Documento3 pagineStrauss PDEch 2 S 1 P 8Pronoy MandalNessuna valutazione finora
- DIFFERENTIAL GEOMETRY OF THE TORUSDocumento7 pagineDIFFERENTIAL GEOMETRY OF THE TORUSRoger ParsNessuna valutazione finora
- Electromagnetics I and II - Formula Sheet: 1 Cartesian Coordinates 3 Spherical CoordinatesDocumento1 paginaElectromagnetics I and II - Formula Sheet: 1 Cartesian Coordinates 3 Spherical CoordinatesberkanNessuna valutazione finora
- Midterm 2Documento1 paginaMidterm 2Izzudin YafiNessuna valutazione finora
- 87 S1Documento7 pagine87 S1ParmenNessuna valutazione finora
- Volume of Solid (Bounded by 2 Surfaces of Paraboloids)Documento2 pagineVolume of Solid (Bounded by 2 Surfaces of Paraboloids)Muhammad Syafieq Abd RazakNessuna valutazione finora
- Mathematics 1c: Homework SolutionsDocumento4 pagineMathematics 1c: Homework Solutionsalteru4Nessuna valutazione finora
- ¿Como Dibujar Diagramas de FasesDocumento1 pagina¿Como Dibujar Diagramas de Fasesguadbe878Nessuna valutazione finora
- On-Dimensional Phase Portraits: A Methodical ApproachDocumento19 pagineOn-Dimensional Phase Portraits: A Methodical ApproachAshik AhmedNessuna valutazione finora
- ¿Como Dibujar Diagramas de FasesDocumento1 pagina¿Como Dibujar Diagramas de Fasesguadbe878Nessuna valutazione finora
- Optimal Control Theory With Aerospace ApplicationsDocumento10 pagineOptimal Control Theory With Aerospace Applicationsguadbe878Nessuna valutazione finora
- Introduccion A Ingeniería Aeroespacial by Franchini HASTA EL TEMA 9Documento365 pagineIntroduccion A Ingeniería Aeroespacial by Franchini HASTA EL TEMA 9guadbe878Nessuna valutazione finora
- CFD Airfoil Flow AnalysisDocumento7 pagineCFD Airfoil Flow Analysisguadbe878Nessuna valutazione finora
- Homework SolutionDocumento13 pagineHomework Solutionguadbe878Nessuna valutazione finora
- How Dna Controls The Workings of The CellDocumento2 pagineHow Dna Controls The Workings of The Cellapi-238397369Nessuna valutazione finora
- VSD Operacion ControlDocumento138 pagineVSD Operacion ControlLeon PerezNessuna valutazione finora
- Astm A6 A6m-08Documento62 pagineAstm A6 A6m-08Vũ Nhân HòaNessuna valutazione finora
- 4495 10088 1 PBDocumento7 pagine4495 10088 1 PBGeorgius Kent DiantoroNessuna valutazione finora
- Ey-H3l Yh1576Documento44 pagineEy-H3l Yh1576jorgeNessuna valutazione finora
- Massive MIMO For Communications With Drone SwarmsDocumento26 pagineMassive MIMO For Communications With Drone SwarmsAsher Suranjith JayakumarNessuna valutazione finora
- Rso PDFDocumento120 pagineRso PDFjohn shepardNessuna valutazione finora
- Sample Question Paper Provides Practice for Class 9 Science ExamDocumento5 pagineSample Question Paper Provides Practice for Class 9 Science ExamViswak BalajiNessuna valutazione finora
- BetaDocumento16 pagineBetaAkshita Saxena100% (2)
- Solutions To Irodov's Problems - Volume IIDocumento442 pagineSolutions To Irodov's Problems - Volume IIZequinha de Abreu100% (2)
- Rodi TestSystem EZSDI1 Iom D603Documento25 pagineRodi TestSystem EZSDI1 Iom D603Ricardo AndradeNessuna valutazione finora
- CI SetDocumento18 pagineCI Setতন্ময় ঢালি Tanmay DhaliNessuna valutazione finora
- Ex - No: 4 Integrator and Differentiator Using Fpaa DateDocumento4 pagineEx - No: 4 Integrator and Differentiator Using Fpaa DatechandraprabhaNessuna valutazione finora
- DS Ac0801 GBDocumento20 pagineDS Ac0801 GBHossein Jalali MoghaddamNessuna valutazione finora
- The Order of Historical Time: The Longue Durée and Micro-HistoryDocumento17 pagineThe Order of Historical Time: The Longue Durée and Micro-HistoryGeorgia KoutaNessuna valutazione finora
- Sensors 22 09378 v2Documento13 pagineSensors 22 09378 v2FahdNessuna valutazione finora
- Biology - Physics Chemistry MCQS: Gyanm'S General Awareness - November 2014Documento13 pagineBiology - Physics Chemistry MCQS: Gyanm'S General Awareness - November 2014santosh.manojNessuna valutazione finora
- Algebra Translating Algebraic Phrases 001Documento2 pagineAlgebra Translating Algebraic Phrases 001crazyomnislash25% (4)
- Exponential & Logarithmic FunctionsDocumento13 pagineExponential & Logarithmic FunctionsRahul SankaranNessuna valutazione finora
- Defense Cheat SheetDocumento4 pagineDefense Cheat SheetCarl Dhaniel Garcia SalenNessuna valutazione finora
- Xenomai 3 DocumentationDocumento673 pagineXenomai 3 DocumentationGuile BonafiniNessuna valutazione finora
- IMChap 014 SDocumento14 pagineIMChap 014 STroy WingerNessuna valutazione finora
- Austenitic Stainless SteelsDocumento10 pagineAustenitic Stainless SteelsbramNessuna valutazione finora
- CS 102 Programming Fundamentals Lecture NotesDocumento14 pagineCS 102 Programming Fundamentals Lecture NotesOkay OkayNessuna valutazione finora
- 01-Jul-21 03:32 PMDocumento6 pagine01-Jul-21 03:32 PMramNessuna valutazione finora
- LTE and SchedulingDocumento25 pagineLTE and SchedulingKrunoslav IvesicNessuna valutazione finora
- Design & Fabrication of a Cost-Effective Agricultural DroneDocumento57 pagineDesign & Fabrication of a Cost-Effective Agricultural DroneFatima Nasir R:29Nessuna valutazione finora
- 997-3 CIP Safety Adapter: Single Point Lesson (SPL) - Configure CIP Safety Adapter and A-B PLCDocumento18 pagine997-3 CIP Safety Adapter: Single Point Lesson (SPL) - Configure CIP Safety Adapter and A-B PLCTensaigaNessuna valutazione finora
- 8086 Instruction SetDocumento66 pagine8086 Instruction SetRaj KumarNessuna valutazione finora
- Unit-3 BioinformaticsDocumento15 pagineUnit-3 Bioinformaticsp vmuraliNessuna valutazione finora