Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5795)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Book of Dynamic Assessment in Practice PDFDocumento421 pagineBook of Dynamic Assessment in Practice PDFkamalazizi100% (1)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Goats & Sheep: What You Need To KnowDocumento74 pagineGoats & Sheep: What You Need To KnowAdrian BAGAYANNessuna valutazione finora
- Power and MagicDocumento40 paginePower and MagicSandro AmoraNessuna valutazione finora
- Fire Art Case StudyDocumento15 pagineFire Art Case StudyKimberlyHerring100% (1)
- Q&A JurisdictionDocumento20 pagineQ&A JurisdictionlucasNessuna valutazione finora
- Thomas E. Skidmore-The Politics of Military Rule in Brazil, 1964-1985-Oxford University Press, USA (1988) PDFDocumento433 pagineThomas E. Skidmore-The Politics of Military Rule in Brazil, 1964-1985-Oxford University Press, USA (1988) PDFMarcelo Ramos100% (2)
- Final Report - Solving Traveling Salesman Problem by Dynamic Programming Approach in Java Program Aditya Nugroho Ht083276eDocumento15 pagineFinal Report - Solving Traveling Salesman Problem by Dynamic Programming Approach in Java Program Aditya Nugroho Ht083276eAytida Ohorgun100% (5)
- SRM Valliammai Engineering College (An Autonomous Institution)Documento9 pagineSRM Valliammai Engineering College (An Autonomous Institution)M Alamgir HossainNessuna valutazione finora
- MIMODocumento30 pagineMIMOM Alamgir HossainNessuna valutazione finora
- Kushtia SDocumento1 paginaKushtia SM Alamgir HossainNessuna valutazione finora
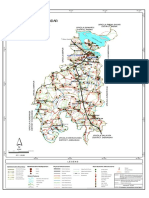
- Kushtia MapDocumento1 paginaKushtia MapM Alamgir HossainNessuna valutazione finora
- Spiritual Transcendence in Transhumanism PDFDocumento10 pagineSpiritual Transcendence in Transhumanism PDFZeljko SaricNessuna valutazione finora
- HW 2Documento2 pagineHW 2Dubu VayerNessuna valutazione finora
- Chapter One Understanding Civics and Ethics 1.1.defining Civics, Ethics and MoralityDocumento7 pagineChapter One Understanding Civics and Ethics 1.1.defining Civics, Ethics and Moralitynat gatNessuna valutazione finora
- UT & TE Planner - AY 2023-24 - Phase-01Documento1 paginaUT & TE Planner - AY 2023-24 - Phase-01Atharv KumarNessuna valutazione finora
- ''Want To Learn To Speak Latin or Greek This (2018) Summer''Documento10 pagine''Want To Learn To Speak Latin or Greek This (2018) Summer''ThriwNessuna valutazione finora
- DND Homebrew Ideas V1 - The HomebreweryDocumento3 pagineDND Homebrew Ideas V1 - The HomebreweryKalazans CardialNessuna valutazione finora
- How To Export: 1) Establishing An OrganisationDocumento5 pagineHow To Export: 1) Establishing An Organisationarpit85Nessuna valutazione finora
- Research Paper 701Documento13 pagineResearch Paper 701api-655942045Nessuna valutazione finora
- Philosophy of Jnanadeva - As Gleaned From The Amrtanubhava (B.P. Bahirat - 296 PgsDocumento296 paginePhilosophy of Jnanadeva - As Gleaned From The Amrtanubhava (B.P. Bahirat - 296 PgsJoão Rocha de LimaNessuna valutazione finora
- Exercise 1-3Documento9 pagineExercise 1-3Patricia MedinaNessuna valutazione finora
- The Role of Mahatma Gandhi in The Freedom Movement of IndiaDocumento11 pagineThe Role of Mahatma Gandhi in The Freedom Movement of IndiaSwathi Prasad100% (6)
- Prepositions French Worksheet For PracticeDocumento37 paginePrepositions French Worksheet For Practiceangelamonteiro100% (1)
- Paediatrica Indonesiana: Sumadiono, Cahya Dewi Satria, Nurul Mardhiah, Grace Iva SusantiDocumento6 paginePaediatrica Indonesiana: Sumadiono, Cahya Dewi Satria, Nurul Mardhiah, Grace Iva SusantiharnizaNessuna valutazione finora
- Activity Lesson PlanDocumento2 pagineActivity Lesson PlanPsiho LoguseNessuna valutazione finora
- Bfhi Poster A2Documento1 paginaBfhi Poster A2api-423864945Nessuna valutazione finora
- Great Is Thy Faithfulness - Gibc Orch - 06 - Horn (F)Documento2 pagineGreat Is Thy Faithfulness - Gibc Orch - 06 - Horn (F)Luth ClariñoNessuna valutazione finora
- Is 13779 1999 PDFDocumento46 pagineIs 13779 1999 PDFchandranmuthuswamyNessuna valutazione finora
- War Thesis StatementsDocumento8 pagineWar Thesis StatementsHelpPaperRochester100% (2)
- Computer Application in Chemical EngineeringDocumento4 pagineComputer Application in Chemical EngineeringRonel MendozaNessuna valutazione finora
- #6 Decision Control InstructionDocumento9 pagine#6 Decision Control InstructionTimothy King LincolnNessuna valutazione finora
- Research ProposalDocumento18 pagineResearch ProposalIsmaelNessuna valutazione finora
- 01ESS - Introducing Siebel ApplicationsDocumento24 pagine01ESS - Introducing Siebel ApplicationsRajaNessuna valutazione finora
- RubricsDocumento1 paginaRubricsBeaMaeAntoniNessuna valutazione finora