Potrebbero piacerti anche
- Material de EnsayoDocumento4 pagineMaterial de Ensayosamuel rojasNessuna valutazione finora
- RoboDK Doc ES Basic GuideDocumento11 pagineRoboDK Doc ES Basic Guidesamuel rojasNessuna valutazione finora
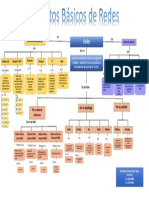
- Conceptos Basicos de RedesDocumento1 paginaConceptos Basicos de Redessamuel rojasNessuna valutazione finora
- RoboDK Doc ES Getting StartedDocumento21 pagineRoboDK Doc ES Getting Startedsamuel rojasNessuna valutazione finora
- ATTK145A56M3Documento113 pagineATTK145A56M3samuel rojas100% (1)
- Revista PDFDocumento9 pagineRevista PDFsamuel rojasNessuna valutazione finora
- TG - IEC - 661-Sistema Domótico Modular Con Tecnología Zigbee para El Control y Monitoreo de Los Recursos Del Hogar Utilizando Plataforma Android PDFDocumento79 pagineTG - IEC - 661-Sistema Domótico Modular Con Tecnología Zigbee para El Control y Monitoreo de Los Recursos Del Hogar Utilizando Plataforma Android PDFsamuel rojasNessuna valutazione finora
- Soluciones para Ambientes Corrosivo Dentro de Los Procesos Mineros Industriales Nico GacituaDocumento61 pagineSoluciones para Ambientes Corrosivo Dentro de Los Procesos Mineros Industriales Nico Gacituamem053840Nessuna valutazione finora
- Estad Basica - ppt1Documento15 pagineEstad Basica - ppt1samuel rojasNessuna valutazione finora
- Ejercicios Fuzzy LogicDocumento3 pagineEjercicios Fuzzy Logicjesus bastardo67% (3)
- TriacDocumento39 pagineTriacBoccaccio Gero100% (2)
- Control DifusoDocumento21 pagineControl DifusoBleyder Andres Guzman BeleñoNessuna valutazione finora
- Introduccion A La Logica DifusaDocumento127 pagineIntroduccion A La Logica DifusaRemy CouteauxNessuna valutazione finora
- MedicaDocumento1 paginaMedicasamuel rojasNessuna valutazione finora
- Arista AjDocumento55 pagineArista AjGlennSBCNessuna valutazione finora
- Rabanal JL PDFDocumento124 pagineRabanal JL PDFVicky AlvarezNessuna valutazione finora
- MultiplexacionDocumento28 pagineMultiplexacionsamuel rojasNessuna valutazione finora
- Iriologia Tesis PDFDocumento139 pagineIriologia Tesis PDFsamuel rojasNessuna valutazione finora
- GalvanómetroDocumento5 pagineGalvanómetrosamuel rojasNessuna valutazione finora
- Componentes de Transmisin de DatosDocumento1 paginaComponentes de Transmisin de Datossamuel rojasNessuna valutazione finora
- Análisis y Optimización de Líneas de Espera en Supermercados Mediante El Uso de La Tecnología NFC Como Método de PagoDocumento2 pagineAnálisis y Optimización de Líneas de Espera en Supermercados Mediante El Uso de La Tecnología NFC Como Método de Pagosamuel rojasNessuna valutazione finora
- Tama I GUIA I 2018Documento10 pagineTama I GUIA I 2018samuel rojasNessuna valutazione finora
- Variables y AtributosDocumento3 pagineVariables y Atributossamuel rojasNessuna valutazione finora
- ResumenDocumento3 pagineResumensamuel rojasNessuna valutazione finora
- Poblacion y MuestraDocumento3 paginePoblacion y Muestrasamuel rojasNessuna valutazione finora
- Tablas de FrecuenciaDocumento23 pagineTablas de Frecuenciasamuel rojasNessuna valutazione finora
- Medicion de CaracteresDocumento3 pagineMedicion de Caracteressamuel rojasNessuna valutazione finora
- Metodo para La Recoleccion de DatosDocumento3 pagineMetodo para La Recoleccion de Datossamuel rojasNessuna valutazione finora
- MedidasDocumento83 pagineMedidasÚrsula PalmaNessuna valutazione finora
- Castro Jesus Jeronimo - Geometria en Olimpiadas Matematicas PDFDocumento148 pagineCastro Jesus Jeronimo - Geometria en Olimpiadas Matematicas PDFJosé Javier Cruz TorresNessuna valutazione finora
- Trabajo Final - ElectroneumaticaDocumento10 pagineTrabajo Final - ElectroneumaticaYudith Delgado GavidiaNessuna valutazione finora
- P12 - DE Conductores - Tensiones de OperaciónDocumento20 pagineP12 - DE Conductores - Tensiones de OperaciónJenniferNessuna valutazione finora
- Ejercicios Resueltos de Logaritmos. MasMates30Documento2 pagineEjercicios Resueltos de Logaritmos. MasMates30joboga23Nessuna valutazione finora
- Diseños FactorialesDocumento31 pagineDiseños FactorialesLaura CeciliaNessuna valutazione finora
- Divison de Un Segmento en Una Razon Dada 23032021 Taller de CálculoDocumento3 pagineDivison de Un Segmento en Una Razon Dada 23032021 Taller de CálculogiloNessuna valutazione finora
- Binarios y HexadecimalesDocumento7 pagineBinarios y HexadecimalesROD STEVE MORA RAMOSNessuna valutazione finora
- Espacio Euclidiano TridimensionalDocumento2 pagineEspacio Euclidiano TridimensionalRandy RestituyoNessuna valutazione finora
- Virtualséptimo - Parte 3Documento29 pagineVirtualséptimo - Parte 3david mantillaNessuna valutazione finora
- SulfatosDocumento7 pagineSulfatosExli JfrNessuna valutazione finora
- FORMATO - Reporte de Resultados Laboratorio 2023-1Documento2 pagineFORMATO - Reporte de Resultados Laboratorio 2023-1Erly Ronal Chavez CarbajalNessuna valutazione finora
- Metodología de La Investigación de Hernández SampieriDocumento6 pagineMetodología de La Investigación de Hernández SampieriYadhira Fuentes0% (1)
- Geometría 2022Documento16 pagineGeometría 2022angeles riveroNessuna valutazione finora
- Actividad 2 Equipos para La Elaboración de QuesosDocumento6 pagineActividad 2 Equipos para La Elaboración de QuesosAlejandra Alzate de LópezNessuna valutazione finora
- HT02 CADLA Ed 02 IRAM 2212Documento2 pagineHT02 CADLA Ed 02 IRAM 2212BagartoNessuna valutazione finora
- CuestionarioDocumento9 pagineCuestionarioMayry Perez AlvaradoNessuna valutazione finora
- 35 12.11.22 Acuicultura SimbioticaDocumento32 pagine35 12.11.22 Acuicultura SimbioticaEdson QuecaraNessuna valutazione finora
- Folleto de Huesos Del Craneo Por Carlos Andres Garcia 1 DownloableDocumento20 pagineFolleto de Huesos Del Craneo Por Carlos Andres Garcia 1 DownloableNatalie Sosa100% (1)
- Sistema BinarioDocumento15 pagineSistema BinarioGOKU VILLEGASNessuna valutazione finora
- Taller Eje 2. Demanda Proyectada A 5 AñosDocumento37 pagineTaller Eje 2. Demanda Proyectada A 5 AñosMery Cristina Triviño MejiaNessuna valutazione finora
- Afiche Mate 4Documento1 paginaAfiche Mate 4Alejandra AlisterNessuna valutazione finora
- MA655 - Problemas TRABAJO FINALDocumento3 pagineMA655 - Problemas TRABAJO FINALSergio Emanuel Cruz AlemánNessuna valutazione finora
- Mecánica Newtoniana: 2020 A Hoja de Trabajo 5Documento5 pagineMecánica Newtoniana: 2020 A Hoja de Trabajo 5Leonardo SerranoNessuna valutazione finora
- Check List Fotos v.2Documento15 pagineCheck List Fotos v.2Amelia SeguinNessuna valutazione finora
- Categorias FilosoficasDocumento33 pagineCategorias Filosoficasjhannira100% (4)
- Manual de PracticasDocumento6 pagineManual de PracticasSoledad AlmansaNessuna valutazione finora
- Informe de Laboratorio Virtual Fisica - FluTermoDocumento4 pagineInforme de Laboratorio Virtual Fisica - FluTermoOscar Bernal PadillaNessuna valutazione finora
- Apuntes 234 1.2Documento8 pagineApuntes 234 1.2Javi RomoNessuna valutazione finora
- Tesis de Ingenieria CivilDocumento113 pagineTesis de Ingenieria CivilMara Rumbo Hacia DesarrolloNessuna valutazione finora
- Guzmán Rocío R3 U3Documento5 pagineGuzmán Rocío R3 U3Bere NaranjoNessuna valutazione finora