Potrebbero piacerti anche
- Discrete Element Method to Model 3D Continuous MaterialsDa EverandDiscrete Element Method to Model 3D Continuous MaterialsNessuna valutazione finora
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11Da EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11Nessuna valutazione finora
- Chapter 8 Two-Dimensional Problem SolutionDocumento51 pagineChapter 8 Two-Dimensional Problem SolutionJoseph Daguio JrNessuna valutazione finora
- Chapter 7 Two-Dimensional FormulationDocumento18 pagineChapter 7 Two-Dimensional FormulationHk Lorilla QuongNessuna valutazione finora
- ME421-Single Degree of Freedom System (Damped) PDFDocumento13 pagineME421-Single Degree of Freedom System (Damped) PDFAli Haider RizviNessuna valutazione finora
- Vibration Suppression and Control: William J. Palm IIIDocumento47 pagineVibration Suppression and Control: William J. Palm IIIMaJo0oDe100% (1)
- Post-Tensioned Concrete Column Supported Slab Design (Flat Plate System)Documento6 paginePost-Tensioned Concrete Column Supported Slab Design (Flat Plate System)Educadd AMEERPET HyderabadNessuna valutazione finora
- Solutions Manual C To Accompany Mechanical Vibration, First Edition by William J. Palm III University of Rhode IslandDocumento62 pagineSolutions Manual C To Accompany Mechanical Vibration, First Edition by William J. Palm III University of Rhode Islandkeerthiv7Nessuna valutazione finora
- FT GT F GT D FT G D: AsteriskDocumento22 pagineFT GT F GT D FT G D: Asterisk174A1 HindupriyaNessuna valutazione finora
- Bolt Tensioning - E411 - GB PDFDocumento2 pagineBolt Tensioning - E411 - GB PDF4jawwy markme026Nessuna valutazione finora
- Response Spectrum Analysis As Per Indian IS: 1893 (Part 1) - 2002Documento15 pagineResponse Spectrum Analysis As Per Indian IS: 1893 (Part 1) - 2002Anonymous UibQYvc6Nessuna valutazione finora
- Deflection Calculation Due To Imposed Load On Corridor JoistDocumento14 pagineDeflection Calculation Due To Imposed Load On Corridor JoistranjitNessuna valutazione finora
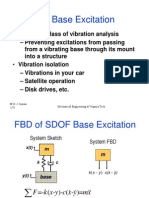
- 2.4 Base Excitation: - Important Class of Vibration Analysis - Preventing Excitations From PassingDocumento51 pagine2.4 Base Excitation: - Important Class of Vibration Analysis - Preventing Excitations From Passingpriyankar007Nessuna valutazione finora
- Quake Ubc 97Documento6 pagineQuake Ubc 97samuelcharca8194Nessuna valutazione finora
- Bolt Load Calculation StepsDocumento2 pagineBolt Load Calculation StepsSrikanth ShankarNessuna valutazione finora
- Calculation Note For Compressor Shelter - Rev ADocumento54 pagineCalculation Note For Compressor Shelter - Rev AmaniaxpdfNessuna valutazione finora
- Analysis of Tenement 1Documento84 pagineAnalysis of Tenement 1IyswariyaNessuna valutazione finora
- Ee5101 Ca1 PDFDocumento24 pagineEe5101 Ca1 PDFHamid FarhanNessuna valutazione finora
- SHRT ColDocumento3 pagineSHRT ColashokNessuna valutazione finora
- Under, Over and Critical DampingDocumento6 pagineUnder, Over and Critical Dampingxeron7126Nessuna valutazione finora
- Pin Base ModuleDocumento16 paginePin Base ModuleMd Ahsanul KabirNessuna valutazione finora
- Double Angle BarDocumento1 paginaDouble Angle BarShadin Asari ArabaniNessuna valutazione finora
- Design of BeamDocumento6 pagineDesign of BeamKen ZoraNessuna valutazione finora
- Modal Space - in Our Own Little World: by Pete AvitabileDocumento2 pagineModal Space - in Our Own Little World: by Pete AvitabileVignesh SelvarajNessuna valutazione finora
- 07 Axisymmetric Finite Element ModelingDocumento14 pagine07 Axisymmetric Finite Element ModelingSchubertDeierlein100% (1)
- SDOF - Free Vibration - DampedDocumento4 pagineSDOF - Free Vibration - DampedJr BongabongNessuna valutazione finora
- CE8501 Notes PDFDocumento53 pagineCE8501 Notes PDFprem rajanNessuna valutazione finora
- Design of RCC Column: DataDocumento3 pagineDesign of RCC Column: DataamokeNessuna valutazione finora
- Wind Analysis ResultsDocumento8 pagineWind Analysis ResultsBrahim HammamiNessuna valutazione finora
- Rectangular Steel Bar DesignDocumento2 pagineRectangular Steel Bar DesignAmit Kumar PaulNessuna valutazione finora
- Concrete Foundation DesignDocumento3 pagineConcrete Foundation DesignPradeep Kumar SukumaranNessuna valutazione finora
- XyzDocumento64 pagineXyzP S HARSHITANessuna valutazione finora
- Bolted Connections: 1.1 Range and Class of The Screw FastenersDocumento8 pagineBolted Connections: 1.1 Range and Class of The Screw FastenersksNessuna valutazione finora
- Design of ColumnDocumento3 pagineDesign of ColumnHarini RameshNessuna valutazione finora
- To Base Plates of Hollow Sections Columns: Conference PaperDocumento9 pagineTo Base Plates of Hollow Sections Columns: Conference PaperMisgun SamuelNessuna valutazione finora
- Wind LoadDocumento45 pagineWind LoadglaydelleNessuna valutazione finora
- MESYS Shaft CalculationDocumento28 pagineMESYS Shaft CalculationZoebairNessuna valutazione finora
- Bevel GearDocumento17 pagineBevel Gearparesh09Nessuna valutazione finora
- Mitigation of Motion in Tall BuldingsDocumento23 pagineMitigation of Motion in Tall BuldingsAkshayNessuna valutazione finora
- FEA Report PDFDocumento24 pagineFEA Report PDFDanish JavedNessuna valutazione finora
- Crimp PLTDocumento5 pagineCrimp PLTSai SushankNessuna valutazione finora
- Design-II, 2016 Bevel Gear Design ProcedureDocumento1 paginaDesign-II, 2016 Bevel Gear Design ProcedureenggsantuNessuna valutazione finora
- Levelwise Seismic Weight CalculationDocumento1 paginaLevelwise Seismic Weight CalculationNadeem HassoonNessuna valutazione finora
- 3.1 - General Principles of Dynamic DesignDocumento36 pagine3.1 - General Principles of Dynamic DesignKevin OzNessuna valutazione finora
- Ib RCC StructuresDocumento12 pagineIb RCC StructuresRaj BakhtaniNessuna valutazione finora
- Subroutine For Cohesive ElementDocumento41 pagineSubroutine For Cohesive ElementBhushanRaj100% (1)
- 14.Eng-Analysis of Sloshing Impact - MuthuvijayDocumento16 pagine14.Eng-Analysis of Sloshing Impact - MuthuvijayImpact JournalsNessuna valutazione finora
- "EMBEDPL" Sample Calculation: (4) H.S.A. Example - "EMBEDPL" WorksheetDocumento5 pagine"EMBEDPL" Sample Calculation: (4) H.S.A. Example - "EMBEDPL" WorksheetVigneshNessuna valutazione finora
- MCR Footing DesignDocumento5 pagineMCR Footing DesignAswin KumarNessuna valutazione finora
- Master Foods 12 MDocumento16 pagineMaster Foods 12 MSarfarazNessuna valutazione finora
- M3D - SampleProblemSet ACI PDFDocumento6 pagineM3D - SampleProblemSet ACI PDFasaisenthilNessuna valutazione finora
- Shear KeyDocumento34 pagineShear KeySheikh Mizanur RahmanNessuna valutazione finora
- Sleeper Rev1Documento23 pagineSleeper Rev1Yatendra TyagiNessuna valutazione finora
- Terminal Report ShredderDocumento25 pagineTerminal Report ShredderEnriv YasiladNessuna valutazione finora
- Thermal Stress ExamplesDocumento10 pagineThermal Stress ExamplesVishal V BhagwatNessuna valutazione finora
- Theory of VibrationDocumento30 pagineTheory of VibrationCharles OndiekiNessuna valutazione finora
- Vibration FinalDocumento20 pagineVibration FinaljaysamNessuna valutazione finora
- DampingDocumento7 pagineDampingManP13Nessuna valutazione finora
- DampingDocumento20 pagineDampingjudeekene_403330720100% (1)
- Chapter 2-3Documento15 pagineChapter 2-3الخليل إبراهيمNessuna valutazione finora
- Panel 01-Eldora-Grand-1500V-2021-R01 - G1Documento2 paginePanel 01-Eldora-Grand-1500V-2021-R01 - G1DHAVAL SHAHNessuna valutazione finora
- Doing Hot Work On Gas ShipDocumento5 pagineDoing Hot Work On Gas ShipAnonymous icnhaNsFNessuna valutazione finora
- Feasibility Study of Solar Photovoltaic (PV) Energy Systems For Rural Villages of Ethiopian Somali Region (A Case Study of Jigjiga Zone)Documento7 pagineFeasibility Study of Solar Photovoltaic (PV) Energy Systems For Rural Villages of Ethiopian Somali Region (A Case Study of Jigjiga Zone)ollata kalanoNessuna valutazione finora
- D6489 PDFDocumento3 pagineD6489 PDFKalindaMadusankaDasanayakaNessuna valutazione finora
- Topic 6 ESD & EMI Considerations Electrostatic Sensitive Devices (M4.2, 5.12 &5.14) - 1Documento49 pagineTopic 6 ESD & EMI Considerations Electrostatic Sensitive Devices (M4.2, 5.12 &5.14) - 1BeaglelalahahaNessuna valutazione finora
- Mech 3-Module 1Documento41 pagineMech 3-Module 1melkisidick angloanNessuna valutazione finora
- EN 1991-1-4 NA enDocumento4 pagineEN 1991-1-4 NA enanuj3936100% (1)
- GT User Manual Revision 1.10Documento66 pagineGT User Manual Revision 1.10Pham LongNessuna valutazione finora
- Shell Hazardous Area Classification FundamentalsDocumento30 pagineShell Hazardous Area Classification Fundamentalsthekevindesai100% (17)
- Noise and Vibration During CosntructionDocumento12 pagineNoise and Vibration During Cosntructionpierre3101Nessuna valutazione finora
- Gordon NovelDocumento50 pagineGordon NovelNic Hotep100% (2)
- ASTM F 412 - 01a Standard Terminology Relating To Plastic Piping Systems1Documento13 pagineASTM F 412 - 01a Standard Terminology Relating To Plastic Piping Systems1JORGE ARTURO TORIBIO HUERTANessuna valutazione finora
- Comfort and Performance Your Customers DemandDocumento18 pagineComfort and Performance Your Customers Demandgizex2013Nessuna valutazione finora
- Grundfos S Pump 5 - 29 KW Super VortexDocumento20 pagineGrundfos S Pump 5 - 29 KW Super Vortexdalveerchoudhary100% (1)
- Q3 NSP - SLP - RLPDocumento41 pagineQ3 NSP - SLP - RLPRushi RavalNessuna valutazione finora
- Autodesk Inventor - Sheet Metal Punch IfeaturesDocumento6 pagineAutodesk Inventor - Sheet Metal Punch IfeaturesNdianabasi UdonkangNessuna valutazione finora
- Makita 2708Documento29 pagineMakita 2708Reuel JacintoNessuna valutazione finora
- An 80-Mg Railroad Engine A Coasting at 6.5 KM - H Strikes A 20Documento4 pagineAn 80-Mg Railroad Engine A Coasting at 6.5 KM - H Strikes A 20Aura Milena Martinez ChavarroNessuna valutazione finora
- Safety Data Sheet 84989 41 3 enDocumento4 pagineSafety Data Sheet 84989 41 3 enAdhiatma Arfian FauziNessuna valutazione finora
- Zaroulas Mies Fullpaper 2020 05 21Documento9 pagineZaroulas Mies Fullpaper 2020 05 21sidgonzoNessuna valutazione finora
- Biomasse-HKW Sandreuth E NQDocumento8 pagineBiomasse-HKW Sandreuth E NQValeriu StanNessuna valutazione finora
- Sec VlanaclsDocumento10 pagineSec VlanaclsTry FajarmanNessuna valutazione finora
- Psychrometric Chart - Us and Si UnitsDocumento1 paginaPsychrometric Chart - Us and Si UnitsRaden_Rici_Abi_1914Nessuna valutazione finora
- User'S Manual: Capstone MicroturbineDocumento56 pagineUser'S Manual: Capstone MicroturbinemassimocalviNessuna valutazione finora
- Creating REST API Using NodeJS and Consuming in AngularJSDocumento8 pagineCreating REST API Using NodeJS and Consuming in AngularJSserignemodouNessuna valutazione finora
- TD Quintolubric 888 68Documento2 pagineTD Quintolubric 888 68Haitham YoussefNessuna valutazione finora
- Phase DiagramDocumento36 paginePhase Diagramzainal arifinNessuna valutazione finora
- How Is Electrical Energy MeasuredDocumento4 pagineHow Is Electrical Energy MeasuredSonya ReddyNessuna valutazione finora
- High Integrity Aluminum (GENERAL)Documento140 pagineHigh Integrity Aluminum (GENERAL)Kmilo Giraldo100% (3)
- Chemical Thermodynamics: Theodore L. Brown H. Eugene Lemay, Jr. and Bruce E. BurstenDocumento43 pagineChemical Thermodynamics: Theodore L. Brown H. Eugene Lemay, Jr. and Bruce E. BurstenChery-an PletNessuna valutazione finora