Potrebbero piacerti anche
- Sample PartDocumento66 pagineSample PartShaik IrfanNessuna valutazione finora
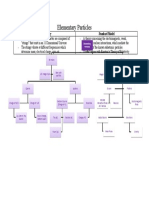
- Elementary ParticlesDocumento1 paginaElementary ParticlesClarisse ParonNessuna valutazione finora
- Fi Gur E1:sampl El Et T ErDocumento9 pagineFi Gur E1:sampl El Et T ErJasmin LeeNessuna valutazione finora
- MCV4U Homework GuideDocumento8 pagineMCV4U Homework GuideChristian KapsalesNessuna valutazione finora
- Break Reless Chapter 1 IntroDocumento1 paginaBreak Reless Chapter 1 IntromohammedalathwaryNessuna valutazione finora
- Guidance FOR THE Audit AND Registration OF Ship Security Management Systems CH A P T e R 1 General ProvisionsDocumento5 pagineGuidance FOR THE Audit AND Registration OF Ship Security Management Systems CH A P T e R 1 General ProvisionsNguyễn Đức TựNessuna valutazione finora
- Chem NotesDocumento98 pagineChem NotesFedeNessuna valutazione finora
- 09 Field Test of A Raman Application of LNG PDFDocumento35 pagine09 Field Test of A Raman Application of LNG PDFprobity2001-2Nessuna valutazione finora
- Chemical Kinetics MLPDocumento22 pagineChemical Kinetics MLPHARSH KHILARINessuna valutazione finora
- Molecular Chemical Bonding NotesDocumento2 pagineMolecular Chemical Bonding NotesMeera KumarNessuna valutazione finora
- MATH001 Online SyllabusDocumento1 paginaMATH001 Online Syllabusهبوب الريحNessuna valutazione finora
- Grade 9 SECOND QUARTERDocumento4 pagineGrade 9 SECOND QUARTERChristine Ainah Pahilagao SalesNessuna valutazione finora
- C-PL-Problems (Posted-Without Solution)Documento10 pagineC-PL-Problems (Posted-Without Solution)Suraj Srivatsav.SNessuna valutazione finora
- Erstl H-RulerDocumento55 pagineErstl H-RulerNguyễn Đức TựNessuna valutazione finora
- Astm-E140 Conversión de DurezasDocumento25 pagineAstm-E140 Conversión de DurezasPablo PerdomoNessuna valutazione finora
- Employees Performance Appraisal in Hindustan Unilever Limited MduDocumento65 pagineEmployees Performance Appraisal in Hindustan Unilever Limited MduHussainNessuna valutazione finora
- Whatwedo NorthsocialDocumento1 paginaWhatwedo NorthsocialJonathan McGrawNessuna valutazione finora
- Lorong Kemenyan BaseplateDocumento3 pagineLorong Kemenyan BaseplateDify Rizky KNessuna valutazione finora
- Smithells Metals Reference BookDa EverandSmithells Metals Reference BookE A BrandesNessuna valutazione finora
- Snapshot Motile CiliaDocumento2 pagineSnapshot Motile CiliaMarcellaNessuna valutazione finora
- S3 OnePager v1Documento1 paginaS3 OnePager v1frankd228801Nessuna valutazione finora
- Nomenclature: I. Functional GroupsDocumento13 pagineNomenclature: I. Functional GroupsParker GoldsteinNessuna valutazione finora
- Hand Book of ValuationDocumento49 pagineHand Book of ValuationmouniNessuna valutazione finora
- Guidance FOR Marine Pollution Prevention Systems Pa R T 1 GeneralDocumento79 pagineGuidance FOR Marine Pollution Prevention Systems Pa R T 1 GeneralNguyễn Đức TựNessuna valutazione finora
- Finite Element Method: Unit - IDocumento20 pagineFinite Element Method: Unit - IGopinath GangadhariNessuna valutazione finora
- Drawing Graphs With: NeatoDocumento11 pagineDrawing Graphs With: NeatoJose Perez GarciaNessuna valutazione finora
- Organisms and Population Flowchart - Telegram Ishita 4 UDocumento11 pagineOrganisms and Population Flowchart - Telegram Ishita 4 Ulakshya singhalNessuna valutazione finora
- (Larson) Introduction To Real AnalysisDocumento178 pagine(Larson) Introduction To Real AnalysisMatteo Esposito100% (1)
- As-NZS 1554.1 Testing RequirementsDocumento2 pagineAs-NZS 1554.1 Testing RequirementsSyed Mahmud Habibur RahmanNessuna valutazione finora
- Smartpays Technology - API DOCUMENTDocumento9 pagineSmartpays Technology - API DOCUMENTvishal khadeNessuna valutazione finora
- Cap 25 TahaDocumento20 pagineCap 25 TahaStiven LinaresNessuna valutazione finora
- Prefixes Roots Suffixes: This Is A List of The Word Parts and Vocabulary Taught in Word Roots BeginningDocumento6 paginePrefixes Roots Suffixes: This Is A List of The Word Parts and Vocabulary Taught in Word Roots BeginningGabriela IonitaNessuna valutazione finora
- Daftar Inventaris Alat Elektronik PKM Sei Mesa 2023Documento3 pagineDaftar Inventaris Alat Elektronik PKM Sei Mesa 2023dewi safitriNessuna valutazione finora
- Guidance FOR THE Construction AND Certification OF Freight Con-Tainers CH A P T e R 1 GeneralDocumento10 pagineGuidance FOR THE Construction AND Certification OF Freight Con-Tainers CH A P T e R 1 GeneralNguyễn Đức TựNessuna valutazione finora
- LORA BrochureDocumento2 pagineLORA BrochureMarcos Antonio Ribeiro JuniorNessuna valutazione finora
- QFD Instructor's GuideDocumento60 pagineQFD Instructor's GuideSalvador Peña Ugalde100% (2)
- Method Statement For Pump InstallationsDocumento4 pagineMethod Statement For Pump InstallationsAnonymous xyZH2OaUV100% (1)
- AFEM Ch11Documento18 pagineAFEM Ch11Arun Kumar KumarNessuna valutazione finora
- Introduction To Real Analysis Lee LarsonDocumento203 pagineIntroduction To Real Analysis Lee LarsonSudip MoiNessuna valutazione finora
- Business Intelligence and Decision Support Systems (9 Ed., Prentice Hall)Documento41 pagineBusiness Intelligence and Decision Support Systems (9 Ed., Prentice Hall)Bajeng Nurul WidyaningrumNessuna valutazione finora
- Unit 1Documento15 pagineUnit 1shubham WadhaneNessuna valutazione finora
- ELTA ELL 8212 8222 Self Protection ECM Jamming PodDocumento2 pagineELTA ELL 8212 8222 Self Protection ECM Jamming PodPaleoMiłekNessuna valutazione finora
- Fem Unit IDocumento34 pagineFem Unit ISAIKUMAR ANessuna valutazione finora
- Astm A666 - StainlesssteelDocumento8 pagineAstm A666 - StainlesssteelPeter MohabNessuna valutazione finora
- E-TREE Requirements and Solution Space: Jim Uttaro Nick Delregno Florin BalusDocumento12 pagineE-TREE Requirements and Solution Space: Jim Uttaro Nick Delregno Florin BalusWilliam BlackNessuna valutazione finora
- Lecture Note SampleDocumento6 pagineLecture Note SampleRobert TNessuna valutazione finora
- Pertemuan: Chemical Bonds (Ikatan Kimia)Documento18 paginePertemuan: Chemical Bonds (Ikatan Kimia)nawane_449851925Nessuna valutazione finora
- Astm 239 PreceeDocumento4 pagineAstm 239 PreceeJesus Antonio Zuniga Martinez100% (1)
- 418NMT01 Numerical MethodsDocumento2 pagine418NMT01 Numerical MethodsSunil KumarNessuna valutazione finora
- P.6 Primary Six MTC SchemeDocumento20 pagineP.6 Primary Six MTC SchemeEKOLU BENEDICTNessuna valutazione finora
- Dapus E-BookDocumento37 pagineDapus E-BookSiti WilhelminahNessuna valutazione finora
- Managing c1 l-4Documento90 pagineManaging c1 l-4ngirma241Nessuna valutazione finora
- Advanced Semiconductor ElectronicsDocumento9 pagineAdvanced Semiconductor ElectronicsHameedullahNessuna valutazione finora
- Fea Unit 4 pg1-26Documento25 pagineFea Unit 4 pg1-26SAURAV KOULNessuna valutazione finora
- Filipino Grade 1 Mtb-Mle First Grading TestDocumento8 pagineFilipino Grade 1 Mtb-Mle First Grading TestJeancy AlipiiNessuna valutazione finora
- Mechani Calandmanuf Act Ur I NG B. Tech. (Me) 7/2017: Assi Gnment - 2Documento4 pagineMechani Calandmanuf Act Ur I NG B. Tech. (Me) 7/2017: Assi Gnment - 2Dhanaraj BhaskarNessuna valutazione finora
- Chapter 4 - Macroscopic DisplacementDocumento43 pagineChapter 4 - Macroscopic DisplacementAfiqah Che Mat100% (3)
- SE AssignmentDocumento2 pagineSE AssignmentSAI PRANEETHNessuna valutazione finora
- Module FDocumento18 pagineModule FDaniellhy 10Nessuna valutazione finora
- BK Chap07Documento78 pagineBK Chap07Jasmina Angelevska KostadinoskaNessuna valutazione finora
- 4-4 Static AND Dynamic Analysis: R e S SDocumento7 pagine4-4 Static AND Dynamic Analysis: R e S SRaiWolf FANessuna valutazione finora
- Structural Analisys 05Documento8 pagineStructural Analisys 05RaiWolf FANessuna valutazione finora
- Structural Analisys 10Documento6 pagineStructural Analisys 10RaiWolf FANessuna valutazione finora
- Structural Analisys 07Documento8 pagineStructural Analisys 07RaiWolf FANessuna valutazione finora
- Structural Analisys 04Documento9 pagineStructural Analisys 04RaiWolf FANessuna valutazione finora
- Structural Analisys 08Documento8 pagineStructural Analisys 08RaiWolf FANessuna valutazione finora
- Structural Analisys 02Documento4 pagineStructural Analisys 02RaiWolf FANessuna valutazione finora
- Cross SectionDocumento1 paginaCross SectionRaiWolf FANessuna valutazione finora
- Fortran Quick Reference Cheat Crib SheetDocumento5 pagineFortran Quick Reference Cheat Crib SheetRaiWolf FANessuna valutazione finora
- 5.0 Transportes Val 10Documento12 pagine5.0 Transportes Val 10RaiWolf FANessuna valutazione finora
- Appendix D SI UnitsDocumento1 paginaAppendix D SI UnitsRaiWolf FANessuna valutazione finora
- Configuring A GEO-SLOPE License ServiceDocumento6 pagineConfiguring A GEO-SLOPE License ServiceRaiWolf FANessuna valutazione finora
- PERTDocDocumento180 paginePERTDocRavindra SbNessuna valutazione finora
- Representation of Curves and SurfacesDocumento36 pagineRepresentation of Curves and SurfacesShahmirBalochNessuna valutazione finora
- 20MIS1025 - Regression - Ipynb - ColaboratoryDocumento5 pagine20MIS1025 - Regression - Ipynb - ColaboratorySandip DasNessuna valutazione finora
- Matrix-Matrix MultiplicationDocumento3 pagineMatrix-Matrix Multiplicationsairin parkNessuna valutazione finora
- FIRST SUMMATIVE TEST-Q2 (Week 1 and Week 2)Documento3 pagineFIRST SUMMATIVE TEST-Q2 (Week 1 and Week 2)Maricel DayritNessuna valutazione finora
- Steady Convection and Diffusion 1D MATLAB CFD CodeDocumento11 pagineSteady Convection and Diffusion 1D MATLAB CFD CodeRoshith MittakoluNessuna valutazione finora
- A Numerical Method For Solving The Horizontal Resection Problem in SurveyingDocumento3 pagineA Numerical Method For Solving The Horizontal Resection Problem in SurveyingMandisa ZibulaNessuna valutazione finora
- Dynamic Analysis of Structures PDFDocumento755 pagineDynamic Analysis of Structures PDFJardeyFrancisVallejo0% (1)
- Determinant and MatLabDocumento14 pagineDeterminant and MatLabAbu Dzar Ar-Rahman Ash-ShidiqNessuna valutazione finora
- LU Decomposition and Matrix Inversion: Credit: Prof. Lale Yurttas, Chemical Eng., Texas A&M UniversityDocumento9 pagineLU Decomposition and Matrix Inversion: Credit: Prof. Lale Yurttas, Chemical Eng., Texas A&M University'Nama Saya Noff'Nessuna valutazione finora
- Behavior of Concrete Columns Under Various Confinement EffectsDocumento427 pagineBehavior of Concrete Columns Under Various Confinement Effectsmrhammad83Nessuna valutazione finora
- Week 7 PDocumento122 pagineWeek 7 PCagri CindiogluNessuna valutazione finora
- Principal MinorsDocumento4 paginePrincipal Minorsringsred100% (1)
- Close Book Exam: Question (1) : (10 Marks)Documento4 pagineClose Book Exam: Question (1) : (10 Marks)Mahmoud KhaledNessuna valutazione finora
- GEG 402 Slides of Numerical Analysis of Ordinary Differential Equations 3Documento54 pagineGEG 402 Slides of Numerical Analysis of Ordinary Differential Equations 3Benedict HounsinouNessuna valutazione finora
- EJEMPLODocumento11 pagineEJEMPLOprofemariosalazaraltNessuna valutazione finora
- Lecture 5. Basic Feasible Solution: Feng ChenDocumento17 pagineLecture 5. Basic Feasible Solution: Feng ChenMa Hdi ChoudhuryNessuna valutazione finora
- Iii Semester: Ability Enhancement CourseDocumento47 pagineIii Semester: Ability Enhancement Coursemujtaba siddiquiNessuna valutazione finora
- Week #6: Laplace Transforms - IntroductionDocumento31 pagineWeek #6: Laplace Transforms - IntroductionAbasi IbrahimNessuna valutazione finora
- Example-35: Solve The Following Non-Linear Programming Problem Using KuhnDocumento17 pagineExample-35: Solve The Following Non-Linear Programming Problem Using KuhnTahera ParvinNessuna valutazione finora
- Linear ProgrammingDocumento7 pagineLinear ProgrammingAthirah AzmanNessuna valutazione finora
- 2008 MOP Blue Polynomials-IDocumento3 pagine2008 MOP Blue Polynomials-IWeerasak BoonwuttiwongNessuna valutazione finora
- Math ZC234 Course HandoutDocumento7 pagineMath ZC234 Course HandoutRamesh AkulaNessuna valutazione finora
- EBE Ch4Documento7 pagineEBE Ch4Syed Muhammad Haris HayatNessuna valutazione finora
- CE301 Course Syllabus Fall 2015Documento2 pagineCE301 Course Syllabus Fall 2015hiandicNessuna valutazione finora
- Lecture03 - Iterative MethodsDocumento21 pagineLecture03 - Iterative MethodsNa2ryNessuna valutazione finora
- Romberg & Gaussian Integration) - Part 2Documento18 pagineRomberg & Gaussian Integration) - Part 2Eyu KalebNessuna valutazione finora
- Assignment ProblemDocumento18 pagineAssignment ProblemHariNessuna valutazione finora
- (Applied Optimization 87) Yurii Nesterov (Auth.) - Introductory Lectures On Convex Optimization - A Basic Course-Springer US (2004)Documento253 pagine(Applied Optimization 87) Yurii Nesterov (Auth.) - Introductory Lectures On Convex Optimization - A Basic Course-Springer US (2004)Bharani DharanNessuna valutazione finora
- MAT-121 Assignment Sheet WA4Documento5 pagineMAT-121 Assignment Sheet WA4Adam RobinsonNessuna valutazione finora
- The Roots of Polynomial Equation & Rational Root of PolynomialDocumento6 pagineThe Roots of Polynomial Equation & Rational Root of PolynomialArdisaMitaPurnaningNessuna valutazione finora