Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Proposal For Changes in The Material RegulationDocumento14 pagineProposal For Changes in The Material RegulationZeljko TrajilovicNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Production Release: Halliburton Energy Services Product Information ReportDocumento7 pagineProduction Release: Halliburton Energy Services Product Information Reportalejandromarinch7Nessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Pool RulesDocumento5 paginePool RulesVy LovNessuna valutazione finora
- Jordan Fitness CatDocumento144 pagineJordan Fitness CatAndrew Richard ThompsonNessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- D&D Character Sheet 18Documento3 pagineD&D Character Sheet 18greta ubermenschNessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- English 9Documento1 paginaEnglish 9MG Sanchez LptNessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
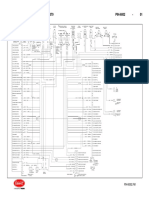
- Diagram, System, Cummins ISX, Model 379 P94-6002 - 01Documento10 pagineDiagram, System, Cummins ISX, Model 379 P94-6002 - 01hamilton miranda100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Wing Chun TestingDocumento9 pagineWing Chun TestingIan100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- November 2017 Month in ReviewDocumento2 pagineNovember 2017 Month in ReviewEmily KaderNessuna valutazione finora
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Tabela Codigos de Erro Grader NovaDocumento7 pagineTabela Codigos de Erro Grader NovaSegundo Francisco Jauregui ValenciaNessuna valutazione finora
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- K. Gábor: Koffol's Sample Training Program Hypertrophy - Week 2Documento2 pagineK. Gábor: Koffol's Sample Training Program Hypertrophy - Week 2Koffi GáborNessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Barefoot Earthing (OnFitness Magazine)Documento4 pagineBarefoot Earthing (OnFitness Magazine)JohanNessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Salsa Dance StepsDocumento6 pagineSalsa Dance StepsPiyush SharmaNessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Body Alchemy: The Shredded AcademyDocumento6 pagineBody Alchemy: The Shredded AcademyMATHEWS MATHEWSNessuna valutazione finora
- Badminton (Text)Documento2 pagineBadminton (Text)marian marianNessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Achilles Tendon Rupture Management - Mar18Documento12 pagineAchilles Tendon Rupture Management - Mar18Leahu AgnesaNessuna valutazione finora
- A Folklore Bestiary For 5E and OSE by Olivier Revenu - KickstarterDocumento1 paginaA Folklore Bestiary For 5E and OSE by Olivier Revenu - KickstarterTesting0% (3)
- Emerald Parts Book 2002Documento19 pagineEmerald Parts Book 2002simanjuntak15Nessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- 200 XC USA 2008: Spare Parts Manual: ChassisDocumento32 pagine200 XC USA 2008: Spare Parts Manual: ChassischarlesNessuna valutazione finora
- Legacy and Impact in The West: Rumiko Takahashi AnthologyDocumento5 pagineLegacy and Impact in The West: Rumiko Takahashi AnthologyWolfMensch1216Nessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Fabian Von Auerswald PDFDocumento2 pagineFabian Von Auerswald PDFAmyNessuna valutazione finora
- PE 101 ManualDocumento24 paginePE 101 ManualNicole VillenaNessuna valutazione finora
- Letter For Parents Drum and Lyre MattersDocumento1 paginaLetter For Parents Drum and Lyre MattersRon RealinNessuna valutazione finora
- FHO DischargeDocumento1 paginaFHO DischargeVarghese NellimoottilNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Front Chainwheel: Chain Guard TypeDocumento1 paginaFront Chainwheel: Chain Guard TypeStefan NeukamNessuna valutazione finora
- Ing GrisDocumento5 pagineIng GrisChristy TheresaNessuna valutazione finora
- From Flap Jacks 2 Thick StacksDocumento20 pagineFrom Flap Jacks 2 Thick StacksМарсел ДимитровNessuna valutazione finora
- A5 Operation ManualDocumento10 pagineA5 Operation ManualAlexandr Ivanov Sarmiento100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Skyrim ModsDocumento5 pagineSkyrim ModsMason BlondeauNessuna valutazione finora
- Just Uploaded To DownloadDocumento4 pagineJust Uploaded To DownloadZachyboiNessuna valutazione finora
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)