Potrebbero piacerti anche
- MM RH Cap 09 Transf EsfuerzoDocumento48 pagineMM RH Cap 09 Transf Esfuerzojosephrc8808Nessuna valutazione finora
- Aplicaciones ED MecatronicaDocumento6 pagineAplicaciones ED Mecatronicaja_moran100% (4)
- Aplicaciones ED MecatronicaDocumento6 pagineAplicaciones ED Mecatronicaja_moran100% (4)
- Manual Fluid SimDocumento0 pagineManual Fluid SimSuray RezaNessuna valutazione finora
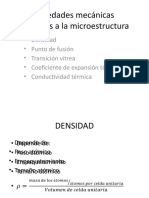
- Propiedades Mecánicas Insensibles A La MicroestructuraDocumento26 paginePropiedades Mecánicas Insensibles A La MicroestructuraAndres NuñezNessuna valutazione finora
- Velocidad y RapidezDocumento8 pagineVelocidad y RapidezAlonzo Vega MontezaNessuna valutazione finora
- Analisis Del Movimiento Rectilineo Uniforme A Travez de La Practica Con Una Manguera Transparente Llena de Agua Calibrada Sobre Un Riel de Alumminio Graduado Inclinad1Documento6 pagineAnalisis Del Movimiento Rectilineo Uniforme A Travez de La Practica Con Una Manguera Transparente Llena de Agua Calibrada Sobre Un Riel de Alumminio Graduado Inclinad1yaneth cardona figueroaNessuna valutazione finora
- 1er Sem. - Matemáticas, Fuerzas y Movimiento - U1 Con Portada PDFDocumento21 pagine1er Sem. - Matemáticas, Fuerzas y Movimiento - U1 Con Portada PDFhumbert50% (2)
- Ejercicios de Integrales de Línea, Superficie y VolumenDa EverandEjercicios de Integrales de Línea, Superficie y VolumenValutazione: 4 su 5 stelle4/5 (2)
- Antalogia de MecanismosDocumento167 pagineAntalogia de MecanismosDomínguez LuisNessuna valutazione finora
- Introducción ¿Qué Es Un Mecanismo¿Qué Es Una Máquina Los Operadores MecánicosDocumento30 pagineIntroducción ¿Qué Es Un Mecanismo¿Qué Es Una Máquina Los Operadores MecánicosPamela GoncalvezNessuna valutazione finora
- Sistemas de Unidades, MetrologiaDocumento48 pagineSistemas de Unidades, MetrologialuisNessuna valutazione finora
- Libro DiseñoDocumento107 pagineLibro DiseñoVICENTE VILLAVERDE MUÑOZ100% (2)
- Introduccion Maquinas FluidosDocumento27 pagineIntroduccion Maquinas Fluidoselpali100% (1)
- Tecnología Mecánica IIDocumento112 pagineTecnología Mecánica IIStevenNessuna valutazione finora
- Ley-Grashof-mecanismos-4-barrasDocumento6 pagineLey-Grashof-mecanismos-4-barrasrorsasNessuna valutazione finora
- Introducción A Los MecanismosDocumento16 pagineIntroducción A Los MecanismosDaniela Galvan ChavezNessuna valutazione finora
- Dimensionamiento de la leva: ángulo de presión, radio de curvatura y consideraciones prácticas de diseñoDocumento15 pagineDimensionamiento de la leva: ángulo de presión, radio de curvatura y consideraciones prácticas de diseñoAngel LLamasNessuna valutazione finora
- Análisis y Síntesis de Mecanismos ResumenDocumento17 pagineAnálisis y Síntesis de Mecanismos ResumenGAM TZ- Tutos y Covers100% (1)
- TorsionDocumento17 pagineTorsionCesar Vasco GuerreroNessuna valutazione finora
- Travajo de Investigacion de Ecuaciones DiferencialesDocumento33 pagineTravajo de Investigacion de Ecuaciones DiferencialesDavid W-kc Almora Mamani - Ōf̲̲̅̅ı̲̲̅c̲̲̅̅ı̲̲̅̅a̲̲̅̅l̲̲̅̅'̲̲̅̅f̲̲̅̅b100% (1)
- Clasificación emec de cuatro barrasDocumento22 pagineClasificación emec de cuatro barrasalex ruizNessuna valutazione finora
- Definiciones mecánicas básicasDocumento15 pagineDefiniciones mecánicas básicasMarco AdameNessuna valutazione finora
- Resumen Maquinas HidraulicasDocumento11 pagineResumen Maquinas HidraulicasRoberto Squertz LiveNessuna valutazione finora
- 1 4 Combustión y CombustiblesDocumento26 pagine1 4 Combustión y CombustiblesOscar MarinNessuna valutazione finora
- Practica 3. Modelaje de Rodamiento, 1723215Documento14 paginePractica 3. Modelaje de Rodamiento, 1723215DANIELANessuna valutazione finora
- Poloeas-Correas y EngranajesDocumento8 paginePoloeas-Correas y EngranajesMartos100% (3)
- Unidad 3 LevasDocumento10 pagineUnidad 3 LevasPablo Jair Perez AlvarezNessuna valutazione finora
- Análisis de mecanismos mediante números complejosDocumento11 pagineAnálisis de mecanismos mediante números complejosEduardo RomoNessuna valutazione finora
- MECANISMOS y MÁQUINASDocumento43 pagineMECANISMOS y MÁQUINASrobinson martinezNessuna valutazione finora
- Pérdidas por fricción tuberíasDocumento7 paginePérdidas por fricción tuberíasfranciscoguzmanvazquNessuna valutazione finora
- Sistemas MecánicosDocumento30 pagineSistemas MecánicosOscarRodriguezNessuna valutazione finora
- Dispositivos de Medir Presión.Documento7 pagineDispositivos de Medir Presión.Laura LeónNessuna valutazione finora
- Manufactura de Materiales CompuestosDocumento26 pagineManufactura de Materiales CompuestosRodrigo BorgiaNessuna valutazione finora
- Mecanismos de Retorno RápidoDocumento11 pagineMecanismos de Retorno RápidoFabio Milton CastroNessuna valutazione finora
- Ciclo de Carnott y Ciclo de OttoDocumento15 pagineCiclo de Carnott y Ciclo de OttoShirley Ayala100% (2)
- Tema 2. Materiales FerrososDocumento17 pagineTema 2. Materiales FerrososSam DobsonNessuna valutazione finora
- Funcion de TransferenciaDocumento35 pagineFuncion de TransferenciaJosé Terán CseNessuna valutazione finora
- Unidad 1 MecanismosDocumento29 pagineUnidad 1 MecanismosCharly CocoletziNessuna valutazione finora
- Amplificador OperacionalDocumento26 pagineAmplificador OperacionalAntonio MachadoNessuna valutazione finora
- Trenes de Engranajes Ordinarios - Clase de Teoría - JR - para EstudiantesDocumento27 pagineTrenes de Engranajes Ordinarios - Clase de Teoría - JR - para EstudiantesgeoswaldNessuna valutazione finora
- Ingeniería electromecánica - Accesorios de baja tensiónDocumento9 pagineIngeniería electromecánica - Accesorios de baja tensiónGalvan Salgado Maria FernandaNessuna valutazione finora
- Unidad 2Documento27 pagineUnidad 2RopisDayannaNessuna valutazione finora
- Compuertas LogicasDocumento7 pagineCompuertas LogicasPaola BonillaNessuna valutazione finora
- Sintesis Analitica Por Numeros ComplejosDocumento6 pagineSintesis Analitica Por Numeros ComplejosEduardo Michel LopezNessuna valutazione finora
- Práctica de Diseño LibreDocumento57 paginePráctica de Diseño LibreCesar Villanueva ChavezNessuna valutazione finora
- Catapulta - FISICA IDocumento3 pagineCatapulta - FISICA Ijair velazquez reyesNessuna valutazione finora
- Falla Por FatigaDocumento21 pagineFalla Por FatigaVictoria Quintero MejiaNessuna valutazione finora
- Poleas y BandasDocumento3 paginePoleas y BandasMarco PilcoNessuna valutazione finora
- Lineas de TransmisionDocumento6 pagineLineas de Transmisionalberth44Nessuna valutazione finora
- Polea Correas y EngranajesDocumento15 paginePolea Correas y EngranajesJose BastardoNessuna valutazione finora
- Mecanismos de Retorno RápidoDocumento13 pagineMecanismos de Retorno RápidoSegundo C. G.Nessuna valutazione finora
- MetodologÃ-a para Generaciã N de Trayectorias de Manipuladores Robã TicosDocumento203 pagineMetodologÃ-a para Generaciã N de Trayectorias de Manipuladores Robã TicosJulian David Arevalo GarciaNessuna valutazione finora
- Engranes y Trenes de EngranajeDocumento5 pagineEngranes y Trenes de EngranajeRaul GonzalezNessuna valutazione finora
- Diodo ZenerDocumento31 pagineDiodo ZenerAdelmo HernandezNessuna valutazione finora
- Esfuerzo y Deformación Axial de Corte PuroDocumento19 pagineEsfuerzo y Deformación Axial de Corte PuroJavier Fernandez MirandaNessuna valutazione finora
- Historia y normalización del dibujo técnicoDocumento15 pagineHistoria y normalización del dibujo técnicoevertNessuna valutazione finora
- Métodos de Diseño de Circuitos NeumáticosDocumento26 pagineMétodos de Diseño de Circuitos NeumáticosJuan José Gálvez BordonabeNessuna valutazione finora
- 1.3 - Ley de HookeDocumento12 pagine1.3 - Ley de HookeMARIA SERRANONessuna valutazione finora
- Onda SenoidalDocumento5 pagineOnda SenoidalAlejandro Fernández MataNessuna valutazione finora
- Ensayo Introduccion A La ElectronicaDocumento5 pagineEnsayo Introduccion A La ElectronicaAnders GimenezNessuna valutazione finora
- Investigación de materiales semiconductoresDocumento17 pagineInvestigación de materiales semiconductoresEduardo JuárezNessuna valutazione finora
- Elementos de Transporte y Transmisiones Mecanicas Apunte 1Documento14 pagineElementos de Transporte y Transmisiones Mecanicas Apunte 1Leandro GarroneNessuna valutazione finora
- Mec 264 Apuntes Embragues y FrenosDocumento20 pagineMec 264 Apuntes Embragues y FrenosAdrian Huanca LuqueNessuna valutazione finora
- Tren Flotante: Allanando el camino hacia los futuros trenes de alta velocidadDa EverandTren Flotante: Allanando el camino hacia los futuros trenes de alta velocidadNessuna valutazione finora
- Robótica De Enjambre: ¿Cómo puede un enjambre de drones armados impulsados por inteligencia artificial organizar un intento de asesinato?Da EverandRobótica De Enjambre: ¿Cómo puede un enjambre de drones armados impulsados por inteligencia artificial organizar un intento de asesinato?Nessuna valutazione finora
- La Empresa de Cuchillos, GENERALIDADES.Documento15 pagineLa Empresa de Cuchillos, GENERALIDADES.Daniel DiazNessuna valutazione finora
- Reporte Final Estancia II FinalDocumento11 pagineReporte Final Estancia II FinalDaniel DiazNessuna valutazione finora
- Ru1nom02a PDFDocumento1 paginaRu1nom02a PDFcarlos rafael sarabia alonsoNessuna valutazione finora
- Soluciones para La Industria Mantenimien PDFDocumento27 pagineSoluciones para La Industria Mantenimien PDFivanzitoNessuna valutazione finora
- 664 1871 4 PBDocumento20 pagine664 1871 4 PBArango HenryNessuna valutazione finora
- Diagramabloques 140627021130 Phpapp01 PDFDocumento27 pagineDiagramabloques 140627021130 Phpapp01 PDFDaniel DiazNessuna valutazione finora
- TAREA 1. EsfuerzoDocumento6 pagineTAREA 1. EsfuerzoDaniel DiazNessuna valutazione finora
- CM C1 Reporte1Documento15 pagineCM C1 Reporte1Daniel DiazNessuna valutazione finora
- Elasticidad - Física 2Documento33 pagineElasticidad - Física 2José Manuel Toledo Vásquez67% (3)
- Determinación de coordenadas astronómicas mediante observaciones solares y comparación con coordenadas geodésicasDocumento30 pagineDeterminación de coordenadas astronómicas mediante observaciones solares y comparación con coordenadas geodésicasOscar MännlichNessuna valutazione finora
- Guía. Conservación de La EnergíaDocumento7 pagineGuía. Conservación de La EnergíaMIRIAM SARELY ORCCOAPAZA MAMANINessuna valutazione finora
- Cartillafisica 2023 Esccomercio 3 C 3 e 3 DDocumento52 pagineCartillafisica 2023 Esccomercio 3 C 3 e 3 Dariana1313klNessuna valutazione finora
- Albert EinsteinDocumento6 pagineAlbert EinsteinLuis LeonNessuna valutazione finora
- Guía de Laboratorio CinemáticaDocumento5 pagineGuía de Laboratorio CinemáticaAndre JabbNessuna valutazione finora
- Introducción a la mecánica analíticaDocumento40 pagineIntroducción a la mecánica analíticaJose Juan MoralesNessuna valutazione finora
- Movimiento Circular UniformeDocumento7 pagineMovimiento Circular UniformeJeffry Anderson Romero UriolNessuna valutazione finora
- Compendio de FisicaDocumento38 pagineCompendio de FisicaJESUS MIGUEL HUAMAN CJUMONessuna valutazione finora
- Espacio Escénico - 2019Documento3 pagineEspacio Escénico - 2019Stella Maris CapellettiNessuna valutazione finora
- Laboratorio 2 (Mua)Documento18 pagineLaboratorio 2 (Mua)Daniela MendezNessuna valutazione finora
- Una Ojeada A La MateriaDocumento13 pagineUna Ojeada A La MateriaPERRO DE SUPERMANNessuna valutazione finora
- 02 - Capitulo II - Hidrostatica - 2023-1Documento16 pagine02 - Capitulo II - Hidrostatica - 2023-1Emisario de los GorgonitasNessuna valutazione finora
- Clase IV Mecanica de Suelos Parte 1Documento18 pagineClase IV Mecanica de Suelos Parte 1Alexander MVNessuna valutazione finora
- nm7 Basico Modelo Corpuscular de La MateriaDocumento26 paginenm7 Basico Modelo Corpuscular de La MateriaCesar Sanchez100% (2)
- Tarea - 4. Definición de Apoyo Mecánico - Salazar Muñoz Brenda LizzethDocumento9 pagineTarea - 4. Definición de Apoyo Mecánico - Salazar Muñoz Brenda LizzethBrenda SalazarNessuna valutazione finora
- Hernandez Mario Actividad 9 Laboratoria de FisicaDocumento7 pagineHernandez Mario Actividad 9 Laboratoria de FisicaMario David HernandezNessuna valutazione finora
- Informe de ReynoldsDocumento10 pagineInforme de ReynoldsDiomer MartinezNessuna valutazione finora
- DilanDocumento9 pagineDilanMichell GomezNessuna valutazione finora
- Trabajo de Estatica - KKKKKKDocumento14 pagineTrabajo de Estatica - KKKKKKDaniangeles RengelNessuna valutazione finora
- Ii Examen de Teoría de Maquinas y Mecanismos - Renzo Ampuero Condori - 2012-37241Documento9 pagineIi Examen de Teoría de Maquinas y Mecanismos - Renzo Ampuero Condori - 2012-37241Derlin CondoriNessuna valutazione finora
- Seminario Problemas 6 - GradoF1F13-14Documento2 pagineSeminario Problemas 6 - GradoF1F13-14IreneNessuna valutazione finora
- Practica 0 Repaso 4 F ElasticaDocumento2 paginePractica 0 Repaso 4 F ElasticaDamian RodriguezNessuna valutazione finora
- Vibración forzada por desplazamiento periódico del soporteDocumento13 pagineVibración forzada por desplazamiento periódico del soporteLuis BuenoNessuna valutazione finora
- Física 3Documento606 pagineFísica 3Luis Orlando Chacón VanegasNessuna valutazione finora
- Imforme 1 Fisica 3Documento7 pagineImforme 1 Fisica 3Jesus Caldera AvilezNessuna valutazione finora
- Práctica 4. - Movimiento CircularDocumento6 paginePráctica 4. - Movimiento CircularEustaquio ReyesNessuna valutazione finora
- Temario Comipems FisicaDocumento2 pagineTemario Comipems FisicaLaura SanchezNessuna valutazione finora