Potrebbero piacerti anche
- Foundations For Machines-Analysis & Design - by Shamsher Prakash PDFDocumento337 pagineFoundations For Machines-Analysis & Design - by Shamsher Prakash PDFAnonymous G38yix88% (24)
- Machine Foundation DesignDocumento44 pagineMachine Foundation DesignNimish Prabhukhanolkar75% (4)
- Machine Foundation DesignDocumento62 pagineMachine Foundation DesignRam Varanasi50% (2)
- Block FoundationDocumento3 pagineBlock Foundationdsananda67% (3)
- Rotating Equipment Foundation Design ReportDocumento25 pagineRotating Equipment Foundation Design Reportolomu100% (1)
- Design of Turbo Generator FoundationDocumento44 pagineDesign of Turbo Generator FoundationVed Vrat Arya95% (19)
- Machine Foundation AnalysisDocumento39 pagineMachine Foundation AnalysisramirovillegasNessuna valutazione finora
- Machine Foundation Digital Assignment 2: (1) Types of Machines, Capacity, Operating FrequencyDocumento40 pagineMachine Foundation Digital Assignment 2: (1) Types of Machines, Capacity, Operating Frequencyyedida v r aviswanadh100% (2)
- Machine Foundations On PilesDocumento14 pagineMachine Foundations On PilesLingeswarran NumbikannuNessuna valutazione finora
- Seismic Design For Petrochemical Facilities As Per NBCC 2005 Rev1.2Documento35 pagineSeismic Design For Petrochemical Facilities As Per NBCC 2005 Rev1.2jakeer7100% (2)
- Machine Foundation Dr. BhatiaDocumento172 pagineMachine Foundation Dr. BhatiaBalaji HariNessuna valutazione finora
- Design of Equipment FoundationsDocumento28 pagineDesign of Equipment Foundationsapi-379773793% (42)
- Foundation Design For Vibrating Machines PDFDocumento2 pagineFoundation Design For Vibrating Machines PDFSheiss Nabi50% (2)
- Dynamic FoundationDocumento50 pagineDynamic FoundationTariq Mahmood100% (1)
- SPC-0804.02-40.11 Rev D2 Design of Machine FoundationsDocumento11 pagineSPC-0804.02-40.11 Rev D2 Design of Machine Foundationskamalsingla3100% (5)
- Analysis of Frame Type Machine Foundations Thesis-ShaguftaDocumento76 pagineAnalysis of Frame Type Machine Foundations Thesis-Shaguftaimamta100% (1)
- Equipment Foundation DesignDocumento695 pagineEquipment Foundation Designmirza_munir_baig995100% (5)
- Design For Blower Foundation - SATORPDocumento30 pagineDesign For Blower Foundation - SATORPsinambeladavid100% (3)
- PUMPFDNDocumento9 paginePUMPFDNSebastian Ramos GrilliNessuna valutazione finora
- Pump+Turbine - Foundation Design SpreadsheetDocumento26 paginePump+Turbine - Foundation Design Spreadsheetnpwal88% (8)
- Sample Calculatio For Design of Structures and Foundations For Vibrating MachinesDocumento6 pagineSample Calculatio For Design of Structures and Foundations For Vibrating MachinesRay LeeNessuna valutazione finora
- Dynamic Analysis of Pump Block Foundation - VaidyanathanDocumento5 pagineDynamic Analysis of Pump Block Foundation - VaidyanathanShamik GhoshNessuna valutazione finora
- Zhong Design of Foundations For Large Dynamic Equipment in A High Seismic Region 2013 PDFDocumento12 pagineZhong Design of Foundations For Large Dynamic Equipment in A High Seismic Region 2013 PDFasgharNessuna valutazione finora
- TTE Isolated or Onsoil Foundation Design PDFDocumento6 pagineTTE Isolated or Onsoil Foundation Design PDFFandy SipataNessuna valutazione finora
- Design of Structures & Foundations For Vibrating MachinesDocumento212 pagineDesign of Structures & Foundations For Vibrating MachinesOvidiu Genteanu97% (30)
- Foundation Vibration Analysis: A Strength of Materials ApproachDa EverandFoundation Vibration Analysis: A Strength of Materials ApproachValutazione: 3 su 5 stelle3/5 (2)
- Elastic Stability of Circular Cylindrical ShellsDa EverandElastic Stability of Circular Cylindrical ShellsValutazione: 5 su 5 stelle5/5 (1)
- Civil & Architectural Engineering Department: June 23, 2016Documento71 pagineCivil & Architectural Engineering Department: June 23, 2016Suneesh PNessuna valutazione finora
- Slope Design Process1Documento5 pagineSlope Design Process1@@)&()Nessuna valutazione finora
- Perancangan Lereng (Slope Design)Documento9 paginePerancangan Lereng (Slope Design)@@)&()Nessuna valutazione finora
- Seismic Analysis & Design of Buildings Using IBC-2021 and ASCE 7-16 Equivalent Lateral Force (EFL) and Modal Response Spectrum Analysis ProceduresDocumento67 pagineSeismic Analysis & Design of Buildings Using IBC-2021 and ASCE 7-16 Equivalent Lateral Force (EFL) and Modal Response Spectrum Analysis ProceduresYusuf SeidNessuna valutazione finora
- Destiny MaxDocumento2 pagineDestiny MaxSmithesh TpNessuna valutazione finora
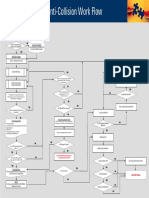
- 01 Anti-Collision Workflow Poster 28-Sep-05Documento2 pagine01 Anti-Collision Workflow Poster 28-Sep-05Anonymous VNu3ODGavNessuna valutazione finora
- Fitness For Services (FFS) by VelosiDocumento2 pagineFitness For Services (FFS) by VelosiDharaniNessuna valutazione finora
- Suspension Design ProcedureDocumento2 pagineSuspension Design ProcedureSudarshan GovindarajanNessuna valutazione finora
- DTMF Chip Flow PictureDocumento1 paginaDTMF Chip Flow Pictureswathikomati7870Nessuna valutazione finora
- Training - Manual - TBN Operation (Rotor Dynamic & Vibration)Documento19 pagineTraining - Manual - TBN Operation (Rotor Dynamic & Vibration)Tung Nguyen100% (1)
- Evotech Case Study 3D Printed Bike Frame PDFDocumento2 pagineEvotech Case Study 3D Printed Bike Frame PDFThe DNessuna valutazione finora
- Lecture 02 HDL PDFDocumento216 pagineLecture 02 HDL PDFijalab1Nessuna valutazione finora
- Fender DesainDocumento32 pagineFender DesainAnonymous ZMLlQvBop100% (1)
- Armv4T: Feature Arm7 Arm9E Arm11 Comparison of Arm7, Arm9 & Arm11 ArchitecturesDocumento1 paginaArmv4T: Feature Arm7 Arm9E Arm11 Comparison of Arm7, Arm9 & Arm11 ArchitecturesgudduNessuna valutazione finora
- Pushover Analysis ProceduresDocumento98 paginePushover Analysis ProceduresYan Yan100% (1)
- FEMA 451 Compl - Struct Analysis Performance-BasedDocumento85 pagineFEMA 451 Compl - Struct Analysis Performance-BasedGeorge Sanches100% (2)
- Performance Based Seismic Evaluation-IEI-AUG2015Documento10 paginePerformance Based Seismic Evaluation-IEI-AUG2015cinithaserc appuNessuna valutazione finora
- 89 Team Demons CAEEvaluationReportDocumento15 pagine89 Team Demons CAEEvaluationReportAtharva SanglikarNessuna valutazione finora
- Ductile Moment Frame PDFDocumento20 pagineDuctile Moment Frame PDFfrancis dimakilingNessuna valutazione finora
- DesignDocumento1 paginaDesignData GeopageNessuna valutazione finora
- Seismic Assessment of Existing Reinforced Concrete Buildings - New Developments, Part 1 of 3Documento5 pagineSeismic Assessment of Existing Reinforced Concrete Buildings - New Developments, Part 1 of 3Yessenia NiñoNessuna valutazione finora
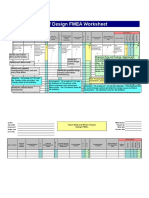
- Example of Design FMEA WorksheetDocumento5 pagineExample of Design FMEA Worksheetரஞ்சன் ஞானயோளிNessuna valutazione finora
- Standard Packing Guideline JICADocumento146 pagineStandard Packing Guideline JICAYul Aryono S.Nessuna valutazione finora
- Appendix - 1 Flow Chart For Design of Structural Steel ElementDocumento7 pagineAppendix - 1 Flow Chart For Design of Structural Steel ElementDarshit Vejani100% (1)
- ME L20 RootLocusLeadDocumento6 pagineME L20 RootLocusLeadRezkodaNessuna valutazione finora
- Design Failure Mode and Effect Analysis (DFMEA) : Characteristics of Failure 1St Rating Action-Status 2Nd RatingDocumento2 pagineDesign Failure Mode and Effect Analysis (DFMEA) : Characteristics of Failure 1St Rating Action-Status 2Nd RatingMani Kandan100% (1)
- BearingsDocumento10 pagineBearingsafif atmaja100% (1)
- Asic Back End FlowDocumento17 pagineAsic Back End FlowJagannath KbNessuna valutazione finora
- ME451: Control Systems Course RoadmapDocumento6 pagineME451: Control Systems Course RoadmapVu NghiaNessuna valutazione finora
- WebinarDocumento40 pagineWebinarDamilolaNessuna valutazione finora
- (2020) (Poster) Proppant Embedment - GAINDocumento1 pagina(2020) (Poster) Proppant Embedment - GAINEKREM ALAGÖZNessuna valutazione finora
- Talzat ZachariaDocumento8 pagineTalzat ZachariaArun KumarNessuna valutazione finora
- Twu GeneralMotors 5152012Documento16 pagineTwu GeneralMotors 5152012Milton Encalada100% (1)
- Good For Construction: Key PlanDocumento6 pagineGood For Construction: Key PlanBala SubramanianNessuna valutazione finora
- Concrete Pouring Check List For Building ExecutionDocumento27 pagineConcrete Pouring Check List For Building ExecutionBala SubramanianNessuna valutazione finora
- Check List For Concreting: Project: Doc. No.: Qa/Cl-Con/ Client: ContractorDocumento1 paginaCheck List For Concreting: Project: Doc. No.: Qa/Cl-Con/ Client: ContractorBala SubramanianNessuna valutazione finora
- Earth Quake Load CalculationDocumento15 pagineEarth Quake Load CalculationBala SubramanianNessuna valutazione finora
- Thin and Thick CylinderDocumento8 pagineThin and Thick CylinderBala SubramanianNessuna valutazione finora
- A Material Model For Flexural Crack Simulation in Reinforced Concrete Elements Using AbaqusDocumento5 pagineA Material Model For Flexural Crack Simulation in Reinforced Concrete Elements Using AbaqusBala SubramanianNessuna valutazione finora
- Box Culvert Staad CoadingDocumento4 pagineBox Culvert Staad CoadingBala SubramanianNessuna valutazione finora
- Numerical Analytics For Plastic HingeDocumento7 pagineNumerical Analytics For Plastic HingeBala SubramanianNessuna valutazione finora
- Air To Water - VIESSMANN - Vitocal200s - 2010 - en PDFDocumento64 pagineAir To Water - VIESSMANN - Vitocal200s - 2010 - en PDFStefan GiovanniNessuna valutazione finora
- 348 295 1 SheetfeediDocumento2 pagine348 295 1 SheetfeediJuan GonzalezNessuna valutazione finora
- Thermodynamics Temperature08Documento19 pagineThermodynamics Temperature08Abdelkader Faklani DouNessuna valutazione finora
- Physics Paper 1 Marking SchemeDocumento17 paginePhysics Paper 1 Marking Schemeonokaanne9Nessuna valutazione finora
- Floating Head Heat Exchanger MaintenanceDocumento15 pagineFloating Head Heat Exchanger MaintenanceAbdullah Dinsuhaimi100% (8)
- Input Data: Package: Bridge Name: Pier Name: 1. General Input DataDocumento7 pagineInput Data: Package: Bridge Name: Pier Name: 1. General Input DataTuanNessuna valutazione finora
- Consew CSM1000 InstructionsDocumento2 pagineConsew CSM1000 InstructionsJose Eduardo Vargas AngaritaNessuna valutazione finora
- Mech Engg Curriculum According To HecDocumento92 pagineMech Engg Curriculum According To HecRameez AnwarNessuna valutazione finora
- Ducati Monster 821Documento270 pagineDucati Monster 821Michael NguyenNessuna valutazione finora
- SunSaluter Water Solar Tracker ProcedureDocumento10 pagineSunSaluter Water Solar Tracker ProcedureVivek AnandNessuna valutazione finora
- TH663 PDFDocumento6 pagineTH663 PDFCristiano100% (2)
- CAT 2531 Pump Manual.Documento4 pagineCAT 2531 Pump Manual.Armando VelardeNessuna valutazione finora
- UntitledDocumento417 pagineUntitledNam HongNessuna valutazione finora
- SCALARS and VECTORS NotesDocumento3 pagineSCALARS and VECTORS NotesJoana MendoNessuna valutazione finora
- 615-27518-2 Wide-Angle Spray Nozzle Model SDLMKR-ES HSA-TD 25Documento2 pagine615-27518-2 Wide-Angle Spray Nozzle Model SDLMKR-ES HSA-TD 25Reza bostanianNessuna valutazione finora
- Overall - Finned TubeDocumento14 pagineOverall - Finned TubeSakthi VelNessuna valutazione finora
- Actuadores Field Devices Spare Parts Catalogue 2010Documento34 pagineActuadores Field Devices Spare Parts Catalogue 2010Héctor IbáñezNessuna valutazione finora
- Injection Mold Parting PlaneDocumento19 pagineInjection Mold Parting PlaneKodhansNessuna valutazione finora
- Company Overview-Madhuri AgencyDocumento12 pagineCompany Overview-Madhuri AgencyEros IliyaNessuna valutazione finora
- Paper Optimisation of Rims For Shell Eco Marathon Vehicle To Improve Fuel EfficiencyDocumento10 paginePaper Optimisation of Rims For Shell Eco Marathon Vehicle To Improve Fuel EfficiencySangharshBhustalimathNessuna valutazione finora
- Experimental Works For The Beter Understanding Failure Activity Aspects and ResultsDocumento16 pagineExperimental Works For The Beter Understanding Failure Activity Aspects and Resultsbagas prakosoNessuna valutazione finora
- Stability Analysis of Steel Storage Rack StructuresDocumento6 pagineStability Analysis of Steel Storage Rack StructurescoolkaisyNessuna valutazione finora
- API Sealing Ability PDFDocumento11 pagineAPI Sealing Ability PDFBandanos SontolNessuna valutazione finora
- Forced and Free Vibration ProjectDocumento4 pagineForced and Free Vibration ProjectHarshdeep SinghNessuna valutazione finora
- F DampersDocumento17 pagineF Dampersbaba onuNessuna valutazione finora
- Machine Condition Monitoring and Fault DiagnosticsDocumento28 pagineMachine Condition Monitoring and Fault Diagnosticsزيد فؤاد اليافعيNessuna valutazione finora
- Teaching Modules For Steel Instruction: Advanced Flexure Design Composite Beam Theory SlidesDocumento27 pagineTeaching Modules For Steel Instruction: Advanced Flexure Design Composite Beam Theory SlideskiranNessuna valutazione finora
- F5ae9484 9454 AgricolaDocumento150 pagineF5ae9484 9454 Agricolajvega_534120Nessuna valutazione finora
- Motores EficienciaDocumento35 pagineMotores EficienciapatricioNessuna valutazione finora
- Graymills Pump Products CatalogDocumento36 pagineGraymills Pump Products CatalogAyman QunaibiNessuna valutazione finora