Potrebbero piacerti anche
- LINE FOLLOWER ROBOT SYNOPSISDocumento14 pagineLINE FOLLOWER ROBOT SYNOPSISAshmeet SabbyNessuna valutazione finora
- Digital LED Thermometer with Microcontroller AVR ATtiny13Da EverandDigital LED Thermometer with Microcontroller AVR ATtiny13Valutazione: 5 su 5 stelle5/5 (1)
- What is a Literature ReviewDocumento21 pagineWhat is a Literature ReviewJSPNessuna valutazione finora
- Radical Acceptance Guided Meditations by Tara Brach PDFDocumento3 pagineRadical Acceptance Guided Meditations by Tara Brach PDFQuzzaq SebaNessuna valutazione finora
- AP Biology 1st Semester Final Exam Review-2011.2012Documento13 pagineAP Biology 1st Semester Final Exam Review-2011.2012Jessica ShinNessuna valutazione finora
- Line Follower Robot - J4rv4i1010Documento4 pagineLine Follower Robot - J4rv4i1010Journal 4 ResearchNessuna valutazione finora
- Ujpited ?tate of Americal: PresidentsDocumento53 pagineUjpited ?tate of Americal: PresidentsTino Acebal100% (1)
- 14 - Habeas Corpus PetitionDocumento4 pagine14 - Habeas Corpus PetitionJalaj AgarwalNessuna valutazione finora
- Written Arguments of Maintenance Case On Behalf of PetitionerDocumento4 pagineWritten Arguments of Maintenance Case On Behalf of PetitionerSridhara babu. N - ಶ್ರೀಧರ ಬಾಬು. ಎನ್85% (53)
- Budokon - Mma.program 2012 13Documento10 pagineBudokon - Mma.program 2012 13Emilio DiazNessuna valutazione finora
- Line Follower RobotDocumento16 pagineLine Follower RobotRohit sharmaNessuna valutazione finora
- Line Following Robot Using ArduinoDocumento3 pagineLine Following Robot Using ArduinoMegharaj GoudarNessuna valutazione finora
- Build a Line-Following Robot with ArduinoDocumento5 pagineBuild a Line-Following Robot with Arduinochockalingam athilingam100% (1)
- Line Follower Robot ProjectDocumento45 pagineLine Follower Robot ProjectJeffery YipNessuna valutazione finora
- Line Following RobotDocumento17 pagineLine Following RobotSon TeaNessuna valutazione finora
- Line Follower Robot for Industrial ManufacturingDocumento9 pagineLine Follower Robot for Industrial ManufacturingAhuja ShivamNessuna valutazione finora
- Line Follower Robot Using ArduinoDocumento13 pagineLine Follower Robot Using Arduinolizhi2012Nessuna valutazione finora
- Line Follower RobotDocumento16 pagineLine Follower RobotSebastian NistoricăNessuna valutazione finora
- Line Following Robot With Color Detection PDFDocumento10 pagineLine Following Robot With Color Detection PDFpaishkepeng100% (1)
- Statistics Machine Learning Python DraftDocumento319 pagineStatistics Machine Learning Python DraftnagNessuna valutazione finora
- PDF Maze Solver RobotDocumento7 paginePDF Maze Solver RobotVenkat AlluNessuna valutazione finora
- Autonoums Robotics Part 1: IR Led Detector CKTDocumento14 pagineAutonoums Robotics Part 1: IR Led Detector CKTSameer SalamNessuna valutazione finora
- Project Report: Line Following RobotDocumento12 pagineProject Report: Line Following RobotAhsan MuradNessuna valutazione finora
- Line Robot FollowerDocumento23 pagineLine Robot Followeratul mishra100% (1)
- Line Follower Robot Using Arduino: PBL Review Report OnDocumento10 pagineLine Follower Robot Using Arduino: PBL Review Report OnAvinash KumarNessuna valutazione finora
- Parts Needed:-: IR SensorDocumento6 pagineParts Needed:-: IR SensorkjsdjkfNessuna valutazione finora
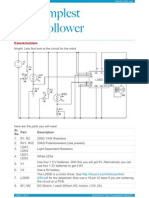
- The Simplest Line Follower: ConstructionDocumento5 pagineThe Simplest Line Follower: Constructionapi-115728880Nessuna valutazione finora
- 2-Way Sound Sensitive Line FollowerDocumento13 pagine2-Way Sound Sensitive Line FollowerAbhishek DasNessuna valutazione finora
- Build Line Following Robot Using Arduino and Infrared LEDDocumento5 pagineBuild Line Following Robot Using Arduino and Infrared LEDmetalpowerNessuna valutazione finora
- How To Build A Simple Line Tracer RobotDocumento6 pagineHow To Build A Simple Line Tracer RobotaashlinnNessuna valutazione finora
- Major Project - Grid Solving RobotDocumento84 pagineMajor Project - Grid Solving RobotAshish Bharade57% (7)
- PhototransistorDocumento13 paginePhototransistorYean CardozoNessuna valutazione finora
- B0610011017 PDFDocumento8 pagineB0610011017 PDFEdiNessuna valutazione finora
- LINE - MAZE SOLVING ROBOTDocumento10 pagineLINE - MAZE SOLVING ROBOTtcteh86Nessuna valutazione finora
- ArduinoDocumento9 pagineArduinoThirdy LuchingNessuna valutazione finora
- Line Follower ReportDocumento23 pagineLine Follower Reportatul mishra88% (8)
- Line Follower Without Using Micro ControllerDocumento3 pagineLine Follower Without Using Micro Controllerp_surya1994Nessuna valutazione finora
- Task 1 Fire Fighting RobotDocumento6 pagineTask 1 Fire Fighting Robotvaibhav9428Nessuna valutazione finora
- InfoMatrix Abstract PocketBot Project - Ondrej Stanek CZDocumento5 pagineInfoMatrix Abstract PocketBot Project - Ondrej Stanek CZLita ClaudiuNessuna valutazione finora
- Build Your Own Transistor Based Mobile Line Follower Robot (LFR) - First PartDocumento6 pagineBuild Your Own Transistor Based Mobile Line Follower Robot (LFR) - First ParterfansahNessuna valutazione finora
- Line Follower Robot Using ArduinoDocumento27 pagineLine Follower Robot Using ArduinoAravind C.KNessuna valutazione finora
- Non Programmable Line Follower RobotDocumento27 pagineNon Programmable Line Follower RobotAsish Kumar Sharma100% (1)
- Line FollowerDocumento13 pagineLine FollowerFarah AzamNessuna valutazione finora
- Line FollowerDocumento15 pagineLine FollowerShivam VaishnavNessuna valutazione finora
- Build Your Own Transistor Based Mobile Line Follower RobotDocumento7 pagineBuild Your Own Transistor Based Mobile Line Follower Robotiky77Nessuna valutazione finora
- 8051 Microcontroller Based Edge Avoiding RobotDocumento14 pagine8051 Microcontroller Based Edge Avoiding RobotJuthik BVNessuna valutazione finora
- InfoMatrix Abstract PocketBot Project - Ondrej Stanek CZDocumento5 pagineInfoMatrix Abstract PocketBot Project - Ondrej Stanek CZElaNessuna valutazione finora
- Design and Implementation of Line Follower Robot Using Arduino MicrocontrollerDocumento4 pagineDesign and Implementation of Line Follower Robot Using Arduino MicrocontrollerFahru ZainiNessuna valutazione finora
- Smartphone Controlled Arduino Rover PDFDocumento30 pagineSmartphone Controlled Arduino Rover PDFWalt Whimpenny100% (1)
- Obstacle Detecting Line Follower RobotDocumento19 pagineObstacle Detecting Line Follower RobotBibek Sau80% (5)
- Line Following: A Basic Tutorial: The IdeaDocumento4 pagineLine Following: A Basic Tutorial: The IdeaRaman KumarNessuna valutazione finora
- A Report of Mini Project Line Following Robot Car Using ArdinoDocumento10 pagineA Report of Mini Project Line Following Robot Car Using Ardinorao asad0% (1)
- Project Report: Digital Logic DesignsDocumento17 pagineProject Report: Digital Logic DesignsSiddique FarooqNessuna valutazione finora
- Building A Line Follower RobotDocumento17 pagineBuilding A Line Follower RobotSurdeep ChaudharyNessuna valutazione finora
- Control Relay Using IR SensorDocumento5 pagineControl Relay Using IR Sensorsmartxdigital marketNessuna valutazione finora
- Automatic Street Light Circuit Using LDRDocumento5 pagineAutomatic Street Light Circuit Using LDRsmartxdigital marketNessuna valutazione finora
- Technical issues and problems with a line follower robotDocumento5 pagineTechnical issues and problems with a line follower robotAhmad AfnanNessuna valutazione finora
- 5 6066828862526850364Documento24 pagine5 6066828862526850364Vivek Kalpana Laxman NarsaleNessuna valutazione finora
- Line-Maze Solver Robot Using ArduinoDocumento4 pagineLine-Maze Solver Robot Using Arduinonecrolin1995Nessuna valutazione finora
- Autonomic Robot Finds and Transports ObjectDocumento26 pagineAutonomic Robot Finds and Transports ObjectZeynal Abidin ŞabaşNessuna valutazione finora
- Control Lamp Using IR SensorDocumento5 pagineControl Lamp Using IR Sensorsmartxdigital marketNessuna valutazione finora
- Build An Autonomous Robot With SensorsDocumento19 pagineBuild An Autonomous Robot With Sensorstejaswi_nisanthNessuna valutazione finora
- Line Follower Robot Using ArduinoDocumento5 pagineLine Follower Robot Using ArduinoJesus Eduardo Campos ArcosNessuna valutazione finora
- Project 2Documento11 pagineProject 2John CedrickNessuna valutazione finora
- Simulation_studies_on_line_light_and_human_followiDocumento25 pagineSimulation_studies_on_line_light_and_human_followiBizuneh getuNessuna valutazione finora
- Radio Frequency Identification and Sensors: From RFID to Chipless RFIDDa EverandRadio Frequency Identification and Sensors: From RFID to Chipless RFIDNessuna valutazione finora
- Leaflet DesignDocumento2 pagineLeaflet DesignMohtasim NakibNessuna valutazione finora
- Basic ElectronicsDocumento46 pagineBasic ElectronicsMohtasim NakibNessuna valutazione finora
- Twenty Problems in ProbabilityDocumento13 pagineTwenty Problems in ProbabilityGopi KrishnaNessuna valutazione finora
- Ch-3 Techniques For Solving Second Order Linear Nonhomogeneous ODE'sDocumento11 pagineCh-3 Techniques For Solving Second Order Linear Nonhomogeneous ODE'sDAVIDNessuna valutazione finora
- LM 2576 HVDocumento37 pagineLM 2576 HVNick CatNessuna valutazione finora
- Line Follower PD Control TutorialDocumento8 pagineLine Follower PD Control TutorialRaghu SuveerNessuna valutazione finora
- Arduino - LearningDocumento711 pagineArduino - LearningAwais TunioNessuna valutazione finora
- SAP HANA Analytics Training at MAJUDocumento1 paginaSAP HANA Analytics Training at MAJUXINessuna valutazione finora
- Chapter 7 Project Cost ManagementDocumento48 pagineChapter 7 Project Cost Managementafifah suyadiNessuna valutazione finora
- NWABSD Lesson PlansDocumento5 pagineNWABSD Lesson Plansapi-379699844Nessuna valutazione finora
- Newtons First LawDocumento14 pagineNewtons First LawcaitlyntreacyNessuna valutazione finora
- Unit Revision-Integrated Systems For Business EnterprisesDocumento8 pagineUnit Revision-Integrated Systems For Business EnterprisesAbby JiangNessuna valutazione finora
- Lesson 5 Capital BudgetingDocumento18 pagineLesson 5 Capital BudgetingklipordNessuna valutazione finora
- Group 1 RDL2Documento101 pagineGroup 1 RDL2ChristelNessuna valutazione finora
- Paige AMCA Silencer PaperDocumento8 paginePaige AMCA Silencer Paperapop1971Nessuna valutazione finora
- Needs and Language Goals of Students, Creating Learning Environments andDocumento3 pagineNeeds and Language Goals of Students, Creating Learning Environments andapi-316528766Nessuna valutazione finora
- Jason A Brown: 1374 Cabin Creek Drive, Nicholson, GA 30565Documento3 pagineJason A Brown: 1374 Cabin Creek Drive, Nicholson, GA 30565Jason BrownNessuna valutazione finora
- Shaft-Hub Couplings With Polygonal Profiles - Citarella-Gerbino2001Documento8 pagineShaft-Hub Couplings With Polygonal Profiles - Citarella-Gerbino2001sosu_sorin3904Nessuna valutazione finora
- Cambridge Intl. Sr. Sec. School Class: X, Preboard Examination-1 Subject: Mathematics Time Allowed: 3Hrs. M.M: 80Documento5 pagineCambridge Intl. Sr. Sec. School Class: X, Preboard Examination-1 Subject: Mathematics Time Allowed: 3Hrs. M.M: 80Suyash PandeyNessuna valutazione finora
- Cartha Worth SharingDocumento27 pagineCartha Worth SharingtereAC85Nessuna valutazione finora
- Class 11 English Snapshots Chapter 1Documento2 pagineClass 11 English Snapshots Chapter 1Harsh彡Eagle彡Nessuna valutazione finora
- 202002Documento32 pagine202002Shyam SundarNessuna valutazione finora
- (123doc) - Internship-Report-Improving-Marketing-Strategies-At-Telecommunication-Service-Corporation-Company-VinaphoneDocumento35 pagine(123doc) - Internship-Report-Improving-Marketing-Strategies-At-Telecommunication-Service-Corporation-Company-VinaphoneK59 PHAN HA PHUONGNessuna valutazione finora
- Us Aers Roadmap Noncontrolling Interest 2019 PDFDocumento194 pagineUs Aers Roadmap Noncontrolling Interest 2019 PDFUlii PntNessuna valutazione finora
- Republic v. EncelanDocumento2 pagineRepublic v. EncelanKyla ReyesNessuna valutazione finora
- Modul Kls XI Sem IDocumento6 pagineModul Kls XI Sem IAnonymous WgvOpI0CNessuna valutazione finora
- Wound Healing (BOOK 71P)Documento71 pagineWound Healing (BOOK 71P)Ahmed KhairyNessuna valutazione finora
- Physics 401 Assignment # Retarded Potentials Solutions:: Wed. 15 Mar. 2006 - Finish by Wed. 22 MarDocumento3 paginePhysics 401 Assignment # Retarded Potentials Solutions:: Wed. 15 Mar. 2006 - Finish by Wed. 22 MarSruti SatyasmitaNessuna valutazione finora