Potrebbero piacerti anche
- Merchant Accounts Are Bank Accounts That Allow Your Business To Accept Card Payments From CustomersDocumento43 pagineMerchant Accounts Are Bank Accounts That Allow Your Business To Accept Card Payments From CustomersRohit Kumar Baghel100% (1)
- Mechanics: What We Did Last TimeDocumento10 pagineMechanics: What We Did Last TimeMamta GoyalNessuna valutazione finora
- Esp-2000 BSDocumento6 pagineEsp-2000 BSByron LopezNessuna valutazione finora
- System of Particles and Rotational Motion Part 2 CH7Documento19 pagineSystem of Particles and Rotational Motion Part 2 CH7Rishab SharmaNessuna valutazione finora
- Faithful Love: Guitar SoloDocumento3 pagineFaithful Love: Guitar SoloCarol Goldburg33% (3)
- Aui2601 Exam Pack 2016 1Documento57 pagineAui2601 Exam Pack 2016 1ricara alexia moodleyNessuna valutazione finora
- Fallas Compresor Copeland-DesbloqueadoDocumento16 pagineFallas Compresor Copeland-DesbloqueadoMabo MabotecnicaNessuna valutazione finora
- Mechanics: Physics 151Documento23 pagineMechanics: Physics 151aamirNessuna valutazione finora
- Lecture-XVI: Rigid Body MotionDocumento13 pagineLecture-XVI: Rigid Body MotionSridhar TholasingamNessuna valutazione finora
- Rotational Dynamics, Moment of Inertia, Torque and Rotational FrictionDocumento11 pagineRotational Dynamics, Moment of Inertia, Torque and Rotational FrictionAhmad Bilal SabawoonNessuna valutazione finora
- CM 27 Eulers EquationsDocumento5 pagineCM 27 Eulers Equationsosama hasanNessuna valutazione finora
- Ch17 PDFDocumento73 pagineCh17 PDFمحمد علي عمرانNessuna valutazione finora
- 3 UNIT I Lecture 3Documento23 pagine3 UNIT I Lecture 3yt HehkkeNessuna valutazione finora
- Mechanics: Physics 151Documento23 pagineMechanics: Physics 151aamirNessuna valutazione finora
- Lecture 37Documento11 pagineLecture 37Shahbaz AhmadNessuna valutazione finora
- 2.moment of InertiaDocumento8 pagine2.moment of InertiaAswath SNessuna valutazione finora
- CM 23 Rigid Body MotionDocumento11 pagineCM 23 Rigid Body Motionosama hasanNessuna valutazione finora
- Mechanics V: Rotation: 1 2D Rotational KinematicsDocumento15 pagineMechanics V: Rotation: 1 2D Rotational Kinematics66 SB jay gotiNessuna valutazione finora
- Rigid BodiesDocumento68 pagineRigid BodiesAmon RoyNessuna valutazione finora
- Goldstein 4 6 7 26Documento11 pagineGoldstein 4 6 7 26bgiangre8372Nessuna valutazione finora
- AppliedDocumento308 pagineAppliedJoseph JanNessuna valutazione finora
- Solution Anlytical FowlessDocumento8 pagineSolution Anlytical FowlessAndika MaulanaNessuna valutazione finora
- Rohini 34957349260Documento4 pagineRohini 34957349260JHNessuna valutazione finora
- Pages From Chapter 18-6Documento10 paginePages From Chapter 18-6taNessuna valutazione finora
- Hibb 11e Dynamics Lecture Section 17-01 RDocumento17 pagineHibb 11e Dynamics Lecture Section 17-01 RMichael Danny AndersonNessuna valutazione finora
- PHD Lecture20 21Documento11 paginePHD Lecture20 21Roy VeseyNessuna valutazione finora
- Inertial Measurement Units II: Gordon Wetzstein! Stanford University!Documento37 pagineInertial Measurement Units II: Gordon Wetzstein! Stanford University!mNessuna valutazione finora
- Robotics Course: LR02.2: 3 Dimensional Rotation and TranslationDocumento36 pagineRobotics Course: LR02.2: 3 Dimensional Rotation and TranslationThiha Ye ThwayNessuna valutazione finora
- RotationDocumento25 pagineRotationAnsh MishraNessuna valutazione finora
- Planar Kinetics of A Rigid Body Force and AccelerationDocumento10 paginePlanar Kinetics of A Rigid Body Force and AccelerationManjunath DNessuna valutazione finora
- CM 25 Rigid Body Moving FreelyDocumento4 pagineCM 25 Rigid Body Moving Freelyosama hasanNessuna valutazione finora
- Mechanics: Physics 151Documento21 pagineMechanics: Physics 151Chernet TugeNessuna valutazione finora
- Unsymmetrical BendingDocumento29 pagineUnsymmetrical Bendingdevansh SriNessuna valutazione finora
- PHD Lecture17 18Documento12 paginePHD Lecture17 18Roy VeseyNessuna valutazione finora
- Mod 9Documento13 pagineMod 9api-3766872Nessuna valutazione finora
- Rolling, Torque, and AngularDocumento23 pagineRolling, Torque, and AngularIbrahim AhmedNessuna valutazione finora
- 2.003SC Engineering Dynamics Quiz 2 Problem 1 (25 PTS) : SolutionDocumento10 pagine2.003SC Engineering Dynamics Quiz 2 Problem 1 (25 PTS) : SolutionahoramehriNessuna valutazione finora
- Rigid Body DynamicsDocumento21 pagineRigid Body DynamicsVictorNessuna valutazione finora
- JT 205:quantum Mechanics Assignement 3: Due: 16 of December 2021 Answer All QuestionsDocumento3 pagineJT 205:quantum Mechanics Assignement 3: Due: 16 of December 2021 Answer All QuestionsMaitraNessuna valutazione finora
- A Rank-Invariant Method of Linear and Polynomial Regression AnalysisDocumento37 pagineA Rank-Invariant Method of Linear and Polynomial Regression AnalysisY YNessuna valutazione finora
- Chapter 1, Review of Mechanics of Materials PDFDocumento15 pagineChapter 1, Review of Mechanics of Materials PDFfalcon724Nessuna valutazione finora
- Waves MechanicalDocumento81 pagineWaves MechanicalChandrali DasNessuna valutazione finora
- Ech1 v4.0Documento32 pagineEch1 v4.0Jiachian ChenNessuna valutazione finora
- Quantum Field Theory MethodsDocumento38 pagineQuantum Field Theory Methodsyashu13100% (1)
- Dynamics of A Rigid Body: DM D D DM DFDocumento3 pagineDynamics of A Rigid Body: DM D D DM DFAlessio ScarabelliNessuna valutazione finora
- Lecture 32-2-Rigid Body Dynamics 2-2Documento6 pagineLecture 32-2-Rigid Body Dynamics 2-2nhNessuna valutazione finora
- M8 BfadadfbDocumento23 pagineM8 Bfadadfbbhavyajain200569Nessuna valutazione finora
- Lectures in FEA Fundamentals Lecture 2 VDocumento95 pagineLectures in FEA Fundamentals Lecture 2 VYewendim FentaNessuna valutazione finora
- Dynamics of Machines-Unit 1 - NotesDocumento79 pagineDynamics of Machines-Unit 1 - NotesSYLVIA ANITANessuna valutazione finora
- 2016 Objmhcet Sample Chap Phy PDFDocumento50 pagine2016 Objmhcet Sample Chap Phy PDFAnusha D RejaNessuna valutazione finora
- Rigid Body Dynamics (Wang)Documento5 pagineRigid Body Dynamics (Wang)stevecraigNessuna valutazione finora
- UnitI Lecture2Documento17 pagineUnitI Lecture2SWETHA GNessuna valutazione finora
- EP 222: Classical Mechanics Tutorial Sheet 5: SolutionDocumento14 pagineEP 222: Classical Mechanics Tutorial Sheet 5: SolutionPragyaNessuna valutazione finora
- Symmetry and Conservation LawsDocumento48 pagineSymmetry and Conservation Lawshjprast7591Nessuna valutazione finora
- Unit 2Documento16 pagineUnit 2Utkarsh MishraNessuna valutazione finora
- Rdynamics PDFDocumento14 pagineRdynamics PDFGreen KurimawNessuna valutazione finora
- Kinematika Rotasi-1Documento34 pagineKinematika Rotasi-1Ulfaa FauzanaaNessuna valutazione finora
- Moment of InertiaDocumento30 pagineMoment of InertiaNordiea Miller-youngeNessuna valutazione finora
- Dynamics of Rigid BodiesDocumento12 pagineDynamics of Rigid BodiesAlinaah GunnerNessuna valutazione finora
- Studyguide360: Chapter - 3 Trigonometric Functions Key PointsDocumento18 pagineStudyguide360: Chapter - 3 Trigonometric Functions Key Pointskapil sharmaNessuna valutazione finora
- Chapter - 10 - Dynamics - of - Rotational - Motion - R K ParidaDocumento9 pagineChapter - 10 - Dynamics - of - Rotational - Motion - R K Paridapbreddy42Nessuna valutazione finora
- 7 Rotational-MechanicsExercise PDFDocumento83 pagine7 Rotational-MechanicsExercise PDFAs yyNessuna valutazione finora
- Class 11 Physics Notes Chapter 5 Studyguide360Documento29 pagineClass 11 Physics Notes Chapter 5 Studyguide360Astrid RedNessuna valutazione finora
- Complex PDFDocumento6 pagineComplex PDFBrian BayanayNessuna valutazione finora
- Rotation Kinematics, Moment of Inertia, and Torque: Linear Motion Angular MotionDocumento6 pagineRotation Kinematics, Moment of Inertia, and Torque: Linear Motion Angular MotionAhmad Bilal SabawoonNessuna valutazione finora
- Random Fourier Series with Applications to Harmonic Analysis. (AM-101), Volume 101Da EverandRandom Fourier Series with Applications to Harmonic Analysis. (AM-101), Volume 101Nessuna valutazione finora
- Ino Phy 2020Documento6 pagineIno Phy 2020Adarsh KumarNessuna valutazione finora
- MITHFH Homework 4Documento5 pagineMITHFH Homework 4Mamta GoyalNessuna valutazione finora
- MITHFH Homework 3Documento6 pagineMITHFH Homework 3Mamta GoyalNessuna valutazione finora
- MITHFH Class Probs 7Documento6 pagineMITHFH Class Probs 7Mamta GoyalNessuna valutazione finora
- NBBHVVCDocumento3 pagineNBBHVVCMamta GoyalNessuna valutazione finora
- A B A B A B: iϕ −iϕ iϕ −iϕDocumento4 pagineA B A B A B: iϕ −iϕ iϕ −iϕHerman HermanNessuna valutazione finora
- Mechanics: What We Did Last TimeDocumento9 pagineMechanics: What We Did Last TimeMamta GoyalNessuna valutazione finora
- HTL 4Documento4 pagineHTL 4Mamta GoyalNessuna valutazione finora
- PHY103 - Course Handout - Jan - 2018Documento1 paginaPHY103 - Course Handout - Jan - 2018Mamta GoyalNessuna valutazione finora
- 2007 Fall Physcs15b SyllabusDocumento3 pagine2007 Fall Physcs15b SyllabusMamta GoyalNessuna valutazione finora
- Ps 2Documento3 paginePs 2ZechNessuna valutazione finora
- Volume 9: Statistical Physics, Part 2 Volume 10: Physical KineticsDocumento1 paginaVolume 9: Statistical Physics, Part 2 Volume 10: Physical KineticsMamta GoyalNessuna valutazione finora
- SCL NL) Blew: KWR QMDocumento7 pagineSCL NL) Blew: KWR QMMamta GoyalNessuna valutazione finora
- Book List For Iit JeeDocumento13 pagineBook List For Iit JeeMamta GoyalNessuna valutazione finora
- Mechanics: What We Did Last TimeDocumento9 pagineMechanics: What We Did Last TimeMamta GoyalNessuna valutazione finora
- Calculus BooksDocumento1 paginaCalculus BooksMamta GoyalNessuna valutazione finora
- NBBHVVCDocumento3 pagineNBBHVVCMamta GoyalNessuna valutazione finora
- Math 55a, Fall 2018: April 18, 2019Documento95 pagineMath 55a, Fall 2018: April 18, 2019Mamta GoyalNessuna valutazione finora
- Quora ComDocumento11 pagineQuora ComMamta GoyalNessuna valutazione finora
- Volume 9: Statistical Physics, Part 2 Volume 10: Physical KineticsDocumento1 paginaVolume 9: Statistical Physics, Part 2 Volume 10: Physical KineticsMamta GoyalNessuna valutazione finora
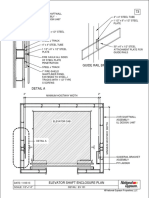
- Guide Rail Bracket AssemblyDocumento1 paginaGuide Rail Bracket AssemblyPrasanth VarrierNessuna valutazione finora
- Local, Local Toll and Long Distance CallingDocumento2 pagineLocal, Local Toll and Long Distance CallingRobert K Medina-LoughmanNessuna valutazione finora
- Trading Book - AGDocumento7 pagineTrading Book - AGAnilkumarGopinathanNairNessuna valutazione finora
- T-61.246 Digital Signal Processing and Filtering T-61.246 Digitaalinen Signaalink Asittely Ja Suodatus Description of Example ProblemsDocumento35 pagineT-61.246 Digital Signal Processing and Filtering T-61.246 Digitaalinen Signaalink Asittely Ja Suodatus Description of Example ProblemsDoğukan TuranNessuna valutazione finora
- MPH EocDocumento8 pagineMPH EocGalaleldin AliNessuna valutazione finora
- Unknown 31Documento40 pagineUnknown 31Tina TinaNessuna valutazione finora
- Simple Fat Burning Exercises at Home or GymDocumento6 pagineSimple Fat Burning Exercises at Home or GymShirleyNessuna valutazione finora
- Tours and Travel MNGTDocumento16 pagineTours and Travel MNGTArpita Jaiswal100% (5)
- LS3954A LS3954 LS3955 LS3956 LS3958: Linear Integrated SystemsDocumento3 pagineLS3954A LS3954 LS3955 LS3956 LS3958: Linear Integrated SystemsJCMNessuna valutazione finora
- Stadium and Club Tours - Senior Tour GuideDocumento4 pagineStadium and Club Tours - Senior Tour GuidebizmbuuNessuna valutazione finora
- Araldite 2020 + XW 396 - XW 397Documento6 pagineAraldite 2020 + XW 396 - XW 397Paul Dan OctavianNessuna valutazione finora
- Read The Text and Answer The QuestionsDocumento5 pagineRead The Text and Answer The QuestionsDanny RuedaNessuna valutazione finora
- 面向2035的新材料强国战略研究 谢曼Documento9 pagine面向2035的新材料强国战略研究 谢曼hexuan wangNessuna valutazione finora
- NS1 UserManual EN V1.2Documento31 pagineNS1 UserManual EN V1.2T5 TecnologiaNessuna valutazione finora
- Transportation Engineering Unit I Part I CTLPDocumento60 pagineTransportation Engineering Unit I Part I CTLPMadhu Ane NenuNessuna valutazione finora
- Atmosphere Study Guide 2013Documento4 pagineAtmosphere Study Guide 2013api-205313794Nessuna valutazione finora
- 11-Potential Use of Volcanic Pumice As A Construction Materialhossain2004Documento7 pagine11-Potential Use of Volcanic Pumice As A Construction Materialhossain2004afzal taiNessuna valutazione finora
- 11 Stem P - Group 2 - CPT First GradingDocumento7 pagine11 Stem P - Group 2 - CPT First GradingZwen Zyronne Norico LumiwesNessuna valutazione finora
- Comparativa Microplex F40 Printronix P8220 enDocumento1 paginaComparativa Microplex F40 Printronix P8220 enangel ricaNessuna valutazione finora
- InfltiDocumento13 pagineInfltiLEKH021Nessuna valutazione finora
- Group 9Documento1 paginaGroup 9Kyla Jane GabicaNessuna valutazione finora
- A Study On Awareness of Mutual Funds and Perception of Investors 2Documento89 pagineA Study On Awareness of Mutual Funds and Perception of Investors 2Yashaswini BangeraNessuna valutazione finora
- Case 1394 Moteur 1 2Documento36 pagineCase 1394 Moteur 1 2ionel ianosNessuna valutazione finora
- E34-1 Battery Charging and Dishcharging BoardDocumento23 pagineE34-1 Battery Charging and Dishcharging BoardGanesa MurthyNessuna valutazione finora
- Amazon Tax Information InterviewDocumento2 pagineAmazon Tax Information Interviewasad nNessuna valutazione finora