Potrebbero piacerti anche
- Fundamentals of Electronics 1: Electronic Components and Elementary FunctionsDa EverandFundamentals of Electronics 1: Electronic Components and Elementary FunctionsNessuna valutazione finora
- 02 Single Phase Im 02Documento8 pagine02 Single Phase Im 02Suleiman Abubakar AuduNessuna valutazione finora
- Modern Electrical Installation for Craft StudentsDa EverandModern Electrical Installation for Craft StudentsValutazione: 4.5 su 5 stelle4.5/5 (4)
- Three Phase Induction RegulatorDocumento5 pagineThree Phase Induction RegulatormohamedmohebNessuna valutazione finora
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkDa EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNessuna valutazione finora
- Chapter 3Documento15 pagineChapter 3Moin AshrafNessuna valutazione finora
- Molecules in Electromagnetic Fields: From Ultracold Physics to Controlled ChemistryDa EverandMolecules in Electromagnetic Fields: From Ultracold Physics to Controlled ChemistryNessuna valutazione finora
- Equivalent Circuit of A Single Phase Induction Motor AIM:-ApparatusDocumento4 pagineEquivalent Circuit of A Single Phase Induction Motor AIM:-ApparatusUdayKiranNessuna valutazione finora
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)Da EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)Nessuna valutazione finora
- Laboratory Session 8 Squirrel Cage Induction Motor CharacteristicsDocumento15 pagineLaboratory Session 8 Squirrel Cage Induction Motor CharacteristicshinsermuNessuna valutazione finora
- Induction Motors 2 2020Documento15 pagineInduction Motors 2 2020Jonathan ArturoNessuna valutazione finora
- 2 5472401978556416138 PDFDocumento97 pagine2 5472401978556416138 PDFZayn AhmedNessuna valutazione finora
- Chapter 3 Induction MotorDocumento21 pagineChapter 3 Induction Motorahmed aliNessuna valutazione finora
- EE6504-Electrical Machines - II-1330526698-Em II Unit 5Documento30 pagineEE6504-Electrical Machines - II-1330526698-Em II Unit 5AnkurNessuna valutazione finora
- Transformer Lab: Department of Electrical and Systems EngineeringDocumento8 pagineTransformer Lab: Department of Electrical and Systems EngineeringKwaku HumbleNessuna valutazione finora
- Stator and Rotor Currents Analysis Of: The Inverted Rotor Induction MotorDocumento6 pagineStator and Rotor Currents Analysis Of: The Inverted Rotor Induction MotorChenaker HamzaNessuna valutazione finora
- Ee 316 - Electrical Machines 1 Week 8: ISUE-EIE-Syl-014 Revision: 02 Effectivity: August 1, 2020Documento5 pagineEe 316 - Electrical Machines 1 Week 8: ISUE-EIE-Syl-014 Revision: 02 Effectivity: August 1, 2020Laurence Abrogena AlmazanNessuna valutazione finora
- KKMNDocumento5 pagineKKMNKATY LISBETH MOROCHO GUACHONessuna valutazione finora
- لقطة شاشة 2023-02-09 في 1.00.13 ص PDFDocumento24 pagineلقطة شاشة 2023-02-09 في 1.00.13 ص PDFsajjad aakulNessuna valutazione finora
- Synchronous Machines Synchronous Machines: OutlineDocumento31 pagineSynchronous Machines Synchronous Machines: Outlinesameerpatel15770Nessuna valutazione finora
- Exp2 - DC Generators (2 Parts) (1) XXDocumento16 pagineExp2 - DC Generators (2 Parts) (1) XXLheidyy36Nessuna valutazione finora
- Determination of Equivalent Circuit Parameters of Single Phase Induction MotorDocumento6 pagineDetermination of Equivalent Circuit Parameters of Single Phase Induction MotorReeta DuttaNessuna valutazione finora
- D C MotorsDocumento4 pagineD C MotorsJegath Ratchagan ArulselvanNessuna valutazione finora
- Faculty of Engineering and Science: Date December 15, 2016 Duration 4 HoursDocumento6 pagineFaculty of Engineering and Science: Date December 15, 2016 Duration 4 HoursŸØüsap BasiliNessuna valutazione finora
- Three-Phase Induction MotorDocumento17 pagineThree-Phase Induction MotorAdarsh AdarshNessuna valutazione finora
- EEE3001 Lab ManualDocumento66 pagineEEE3001 Lab ManualReshab Sahoo100% (1)
- Week 1 Assignment 1 So LNDocumento5 pagineWeek 1 Assignment 1 So LNLloyd Dackz ArenasNessuna valutazione finora
- Section 5 - Induction Motor Drive PDFDocumento55 pagineSection 5 - Induction Motor Drive PDFlalitbickNessuna valutazione finora
- Development of A Switched Reluctance Motor Made of PermendurDocumento5 pagineDevelopment of A Switched Reluctance Motor Made of PermendurNguyen ChuongNessuna valutazione finora
- Electrical EngineeringDocumento66 pagineElectrical EngineeringSuTtA OPNessuna valutazione finora
- Bee Unit4 Lecture2Documento7 pagineBee Unit4 Lecture2haiderNessuna valutazione finora
- The Induction Motor - A Short Circuited Rotating Transformer - A Comparative Analysis C1503021014Documento5 pagineThe Induction Motor - A Short Circuited Rotating Transformer - A Comparative Analysis C1503021014mkdir911Nessuna valutazione finora
- Injection of EMF in Rotor Circuit PDFDocumento5 pagineInjection of EMF in Rotor Circuit PDFkhidirtay50% (2)
- AC Machine Stator: B' Phase AxisDocumento33 pagineAC Machine Stator: B' Phase AxisAshwini Singh100% (1)
- Universal MotorDocumento24 pagineUniversal Motorsnh.2k19Nessuna valutazione finora
- Polyphase Induction MachinesDocumento7 paginePolyphase Induction Machinespurushg62Nessuna valutazione finora
- Power Stages of Induction Motor Power Stages of Induction MotorDocumento25 paginePower Stages of Induction Motor Power Stages of Induction MotorChhaya TiwariNessuna valutazione finora
- Chapter 2: AC Gearmotors and MotorsDocumento10 pagineChapter 2: AC Gearmotors and MotorsJuanJo LlamasNessuna valutazione finora
- Dr. TTIT, KGF WWW - Drttit.edu - in Dr. TTIT, KGF WWW - Drttit.edu - inDocumento2 pagineDr. TTIT, KGF WWW - Drttit.edu - in Dr. TTIT, KGF WWW - Drttit.edu - inrama KrishnaNessuna valutazione finora
- Transformer: School of Computer and Communication Engineering, UnimapDocumento53 pagineTransformer: School of Computer and Communication Engineering, UnimapRajeev Valunjkar100% (1)
- Always Leading The Pack: Unilab LaboratoryDocumento30 pagineAlways Leading The Pack: Unilab LaboratoryMrsSohaibHannanNessuna valutazione finora
- Transformer PPT For First YearDocumento42 pagineTransformer PPT For First YearDhairya Pathak100% (1)
- Performance Characteristics and Double Revolving Theory of Single Phase Induction MotorDocumento12 paginePerformance Characteristics and Double Revolving Theory of Single Phase Induction MotorAravind KumarNessuna valutazione finora
- Induction Motor 2003Documento24 pagineInduction Motor 2003hdrzaman9439Nessuna valutazione finora
- For Most Purposes, Give Satisfactory Results.: (B) Why WillDocumento13 pagineFor Most Purposes, Give Satisfactory Results.: (B) Why WillAnonymous dqbb02DUhNessuna valutazione finora
- FEM of Induction MotorDocumento6 pagineFEM of Induction MotoromokhafeNessuna valutazione finora
- Beee Unit-4 Induction & Synchronous MotorsDocumento27 pagineBeee Unit-4 Induction & Synchronous MotorssrujithvedagiriNessuna valutazione finora
- Aaaaa PDFDocumento8 pagineAaaaa PDFAnonymous dqbb02DUhNessuna valutazione finora
- Ee 8108 Power StagesDocumento41 pagineEe 8108 Power Stagesjocelynejo291Nessuna valutazione finora
- Transfer Fundtion of DC GeneratorDocumento5 pagineTransfer Fundtion of DC GeneratorMohammad Haris MNessuna valutazione finora
- Three-Phase Induction Motor: Shadhon Chandra MohontaDocumento16 pagineThree-Phase Induction Motor: Shadhon Chandra Mohontamonster promelNessuna valutazione finora
- Sardar Vallabhbhai Patel Institute of Technology, Vasad: Equivalent Circuit of Induction Motor & Phasor DiagramDocumento23 pagineSardar Vallabhbhai Patel Institute of Technology, Vasad: Equivalent Circuit of Induction Motor & Phasor DiagramSANJAYNessuna valutazione finora
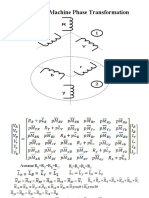
- Induction Machine Phase TransformationDocumento20 pagineInduction Machine Phase Transformation7sn omerNessuna valutazione finora
- Lecture 04 - Chap 3 Modeling of Generators and TransformersDocumento20 pagineLecture 04 - Chap 3 Modeling of Generators and TransformersHabes NoraNessuna valutazione finora
- Ele 099 Alternotor Lec 7 01 25 24Documento15 pagineEle 099 Alternotor Lec 7 01 25 24Mike AndayaNessuna valutazione finora
- 7 - Lecture - Induction MotorsDocumento41 pagine7 - Lecture - Induction MotorspaurushgodharNessuna valutazione finora
- The Motor-Generator Ph.M. Kanarev, S.B. Zatsarinin Announcement. The Test Results of The First Model of A Motor-Generator Are A Simple andDocumento9 pagineThe Motor-Generator Ph.M. Kanarev, S.B. Zatsarinin Announcement. The Test Results of The First Model of A Motor-Generator Are A Simple andMihai DanielNessuna valutazione finora
- The Dynamic Braking of Induction MotorsDocumento9 pagineThe Dynamic Braking of Induction MotorsSúta SzalaiNessuna valutazione finora
- Module 6: A.C. Electrical Machines For Hybrid and Electric VehiclesDocumento65 pagineModule 6: A.C. Electrical Machines For Hybrid and Electric VehiclesDeepak mishraNessuna valutazione finora
- Motor - SEMC Brochures 2020Documento12 pagineMotor - SEMC Brochures 2020Charlie NguyenNessuna valutazione finora
- Analysis of Abnormal Short Circuit Between Turns of Generator Rotor WindingsDocumento5 pagineAnalysis of Abnormal Short Circuit Between Turns of Generator Rotor WindingshamidrezaNessuna valutazione finora
- EN - Lowvoltagedrives - For - Cement - REVEDocumento24 pagineEN - Lowvoltagedrives - For - Cement - REVEMostafaElrakhawyNessuna valutazione finora
- Response of A Fixed-Seep Wind Generator Under Low Voltage Ride Through RequirementsDocumento7 pagineResponse of A Fixed-Seep Wind Generator Under Low Voltage Ride Through RequirementsKemal SyafrizalNessuna valutazione finora
- Interrupts 23Documento248 pagineInterrupts 23cmchristoNessuna valutazione finora
- Electrical Machine PDFDocumento100 pagineElectrical Machine PDFrickyreintNessuna valutazione finora
- Power System StabilityDocumento23 paginePower System StabilityJasmeet Dua100% (1)
- Lab Final Exam Answer PDFDocumento4 pagineLab Final Exam Answer PDFhelen tsegayNessuna valutazione finora
- New Circuital Models of Grounding Systems and PDS For EMI Analysis During A Lightning StrikeDocumento6 pagineNew Circuital Models of Grounding Systems and PDS For EMI Analysis During A Lightning StrikeAnderson JustoNessuna valutazione finora
- ET Tut7 AUT2017-18 PDFDocumento3 pagineET Tut7 AUT2017-18 PDFMoulindu KunduNessuna valutazione finora
- AC Motors: Siemens STEP 2000 CourseDocumento45 pagineAC Motors: Siemens STEP 2000 CourseShridhar MoharilNessuna valutazione finora
- Gupta2010 Article ArtificialIntelligenceApplicat PDFDocumento12 pagineGupta2010 Article ArtificialIntelligenceApplicat PDFJohn XaviNessuna valutazione finora
- Schneider Altivar 21Documento65 pagineSchneider Altivar 21fcruz12Nessuna valutazione finora
- SJ Series P1 HitachiDocumento60 pagineSJ Series P1 HitachiJohnDNessuna valutazione finora
- Modeling of Three-Phase Induction Motor Inverter Fault Using SimulinkDocumento13 pagineModeling of Three-Phase Induction Motor Inverter Fault Using SimulinkAmir RasyadanNessuna valutazione finora
- Electrical Submersible Pump (ESP) : Components (Equipment Description) PTP-6.1Documento19 pagineElectrical Submersible Pump (ESP) : Components (Equipment Description) PTP-6.1nawarsNessuna valutazione finora
- Chapter 10 EnergyconDocumento2 pagineChapter 10 EnergyconLuelsonCordovaDeclaradorNessuna valutazione finora
- 0000000-51F6 08 2013Documento12 pagine0000000-51F6 08 2013Everardo PerezNessuna valutazione finora
- SEWDocumento64 pagineSEWCasHeerNessuna valutazione finora
- Biju Patnaik University of Technology: Mechanical EngineeringDocumento37 pagineBiju Patnaik University of Technology: Mechanical EngineeringBhagaban Das100% (1)
- Generator Protection FundamentalsDocumento102 pagineGenerator Protection FundamentalsΚωνσταντινος ΔαλαμαγκαςNessuna valutazione finora
- EE 332: Electrical Machines Laboratory Manual: Squirrel Cage Induction MotorDocumento12 pagineEE 332: Electrical Machines Laboratory Manual: Squirrel Cage Induction MotorrajasekharareddyNessuna valutazione finora
- Ch-14 Induction Motor DrivesDocumento38 pagineCh-14 Induction Motor Drivessukhbat sodnomdorjNessuna valutazione finora
- Ijser: Estimating Parameters of A Three-Phase Induction Motor Using Matlab/SimulinkDocumento7 pagineIjser: Estimating Parameters of A Three-Phase Induction Motor Using Matlab/Simulinkfajar888Nessuna valutazione finora
- Final Year Project Report Optimized Design of Single Phase Induction MotorDocumento12 pagineFinal Year Project Report Optimized Design of Single Phase Induction MotormugheesNessuna valutazione finora
- Advances in Motor TechnologyDocumento8 pagineAdvances in Motor TechnologyWeider SilvaNessuna valutazione finora
- Chapter 4 Professor YDocumento15 pagineChapter 4 Professor YLê Đình VươngNessuna valutazione finora
- Single Phase Induction Motor - 20 - 09 - 2016Documento4 pagineSingle Phase Induction Motor - 20 - 09 - 2016saravanan_KLUNessuna valutazione finora
- Induction Motor (BEE)Documento27 pagineInduction Motor (BEE)Kaushik Patnaik100% (1)
- Section 3 Pumped HydroDocumento74 pagineSection 3 Pumped HydroAhmedNessuna valutazione finora