Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Bosion BX410Documento21 pagineBosion BX410skidamdnevnoNessuna valutazione finora
- XP-Series ASTM Communication Specifications en Ver.1.0 (R312006)Documento18 pagineXP-Series ASTM Communication Specifications en Ver.1.0 (R312006)Aron Raymond0% (1)
- Ebsilon Licensing: ProfessionalDocumento9 pagineEbsilon Licensing: ProfessionalMo FaNessuna valutazione finora
- Questions SampleDocumento14 pagineQuestions Sampleaarthy100% (3)
- mt-700 User ManualDocumento8 paginemt-700 User ManualJorge TavaresNessuna valutazione finora
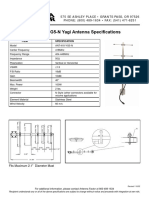
- ANT-418-YG5-N Yagi Antenna SpecificationsDocumento1 paginaANT-418-YG5-N Yagi Antenna SpecificationsJorge TavaresNessuna valutazione finora
- Irregular Past Tense ThirdDocumento1 paginaIrregular Past Tense ThirdJorge Tavares0% (1)
- 433MHz Strength MeterDocumento6 pagine433MHz Strength MeterJorge TavaresNessuna valutazione finora
- DSO Quad V2.7 SchematicDocumento1 paginaDSO Quad V2.7 SchematicJorge TavaresNessuna valutazione finora
- 2 GSM Cell ParametersDocumento100 pagine2 GSM Cell ParametersSalman Zaheer100% (1)
- Encryption Trucrypt EncaseDocumento13 pagineEncryption Trucrypt EncaseBrandon MayoNessuna valutazione finora
- Jee Main Date: 02-09-2020 (Shift - I) Memory Based: LyceumaDocumento33 pagineJee Main Date: 02-09-2020 (Shift - I) Memory Based: LyceumavivekNessuna valutazione finora
- AcknowledgementDocumento38 pagineAcknowledgementSk PandiNessuna valutazione finora
- MultiplexerDocumento13 pagineMultiplexerNeelam Kapoor100% (2)
- Cloud Computing PPT by RahulDocumento16 pagineCloud Computing PPT by RahulJosley VasNessuna valutazione finora
- Link Layer and Lans: A Note On The Use of These PPT SlidesDocumento106 pagineLink Layer and Lans: A Note On The Use of These PPT SlidesmailstonaikNessuna valutazione finora
- GMT200 User Manual V1.00 PDFDocumento15 pagineGMT200 User Manual V1.00 PDFMiChael TibacuyNessuna valutazione finora
- HP and Compaq Desktop PCs - Motherboard Specifications, MS-7184 (AmethystM) - HP® Customer SupportDocumento5 pagineHP and Compaq Desktop PCs - Motherboard Specifications, MS-7184 (AmethystM) - HP® Customer SupportNicolas LeguizamonNessuna valutazione finora
- I RJK Bogor1 161110Documento22 pagineI RJK Bogor1 161110khusni eka wardanaNessuna valutazione finora
- DiskDocumento21 pagineDiskThiyaga RajanNessuna valutazione finora
- Snaptube 2Documento15 pagineSnaptube 2PatriciaHidalgoHernandezNessuna valutazione finora
- Data Exfiltration Using Linux BinariesDocumento22 pagineData Exfiltration Using Linux Binarieseve johnsonNessuna valutazione finora
- Digital-to-Analog Analog-to-Digital: Interface Part IV MicroprocessorDocumento30 pagineDigital-to-Analog Analog-to-Digital: Interface Part IV MicroprocessorVineeth KumarNessuna valutazione finora
- LNO-6020R: Key FeaturesDocumento4 pagineLNO-6020R: Key FeaturesJuniar Putra TheflyingdeadmanNessuna valutazione finora
- Ec6601 Notes Rejinpaul PDFDocumento47 pagineEc6601 Notes Rejinpaul PDFDivya LakshmiNessuna valutazione finora
- Bhanu Prakash S.G: Professional SummaryDocumento3 pagineBhanu Prakash S.G: Professional SummarySunkadahalli Govindaiah Bhanu PrakashNessuna valutazione finora
- It445ccna Study 2013 0819Documento12 pagineIt445ccna Study 2013 0819Arman AzmiNessuna valutazione finora
- LogDocumento28 pagineLogArip PurkonNessuna valutazione finora
- CP SSL NetworkExtender R71 HFA1 ReleasenotesDocumento5 pagineCP SSL NetworkExtender R71 HFA1 ReleasenotesJohan ScottNessuna valutazione finora
- TPU T500 Ed.1Documento397 pagineTPU T500 Ed.1Cristina AntohiNessuna valutazione finora
- Database Design and Implementation 04.bufferDocumento10 pagineDatabase Design and Implementation 04.buffersushmsnNessuna valutazione finora
- Cloud Computing With Open Source and JavaDocumento20 pagineCloud Computing With Open Source and JavabchhotanNessuna valutazione finora
- Ccna Lecture NotesDocumento7 pagineCcna Lecture NotesJunaid AhmedNessuna valutazione finora
- St-55 Data Communication (Compatibility Mode)Documento28 pagineSt-55 Data Communication (Compatibility Mode)Ranjeet SinghNessuna valutazione finora
- IbaPADU-8-M v1.9 en A4Documento39 pagineIbaPADU-8-M v1.9 en A4Rodrigo Antonio Burboa CalistoNessuna valutazione finora