Potrebbero piacerti anche
- Hidden Surface Determination: Unveiling the Secrets of Computer VisionDa EverandHidden Surface Determination: Unveiling the Secrets of Computer VisionNessuna valutazione finora
- CGA Sem 4Documento15 pagineCGA Sem 4Sam SepiolNessuna valutazione finora
- Hidden Surface and Removal PresentationDocumento35 pagineHidden Surface and Removal PresentationDr. MANU SINGH KEC (CSE)Nessuna valutazione finora
- Visible Surface DeterminationDocumento62 pagineVisible Surface DeterminationqwdfghNessuna valutazione finora
- Computer Graphics UNIT VDocumento20 pagineComputer Graphics UNIT VThumbiko MkandawireNessuna valutazione finora
- CG 7Documento8 pagineCG 7Sujan TimalsinaNessuna valutazione finora
- Unit Iv - Part IDocumento76 pagineUnit Iv - Part IVamsi KrishnaNessuna valutazione finora
- Image Processing and AnalysisDocumento38 pagineImage Processing and AnalysisGyan KirtiNessuna valutazione finora
- Computer Graphics RCS-603 Unit-V: Dr. Vinod Jain (Associate Professor, GLBITM)Documento72 pagineComputer Graphics RCS-603 Unit-V: Dr. Vinod Jain (Associate Professor, GLBITM)Dilbag Rai AhujaNessuna valutazione finora
- UNIT-5 - Hidden Lines and SurfacesDocumento33 pagineUNIT-5 - Hidden Lines and SurfacesMahiye Ghosh100% (1)
- V Hidden Lines and Surfaces: Back Face Detection Algorithm, Depth 2. Basic Illumination Models - Ambient Light, Diffuse ReflectionDocumento69 pagineV Hidden Lines and Surfaces: Back Face Detection Algorithm, Depth 2. Basic Illumination Models - Ambient Light, Diffuse Reflectionmuskaan mahajanNessuna valutazione finora
- Chapter 6 PDFDocumento6 pagineChapter 6 PDFirushaNessuna valutazione finora
- BENC 4483enhancement and RestorationDocumento89 pagineBENC 4483enhancement and RestorationAmira Mat AminNessuna valutazione finora
- Hidden Surface Removal - Computer GraphicsDocumento10 pagineHidden Surface Removal - Computer GraphicsSyedkareem_hkgNessuna valutazione finora
- Unit Iii Visual RealismDocumento59 pagineUnit Iii Visual RealismJabin JoeNessuna valutazione finora
- Computer Graphics Lecture 4Documento55 pagineComputer Graphics Lecture 4Crystal DzebuNessuna valutazione finora
- Computer Graphics Imp1Documento35 pagineComputer Graphics Imp1Aswin KVNessuna valutazione finora
- CG Unit-5Documento5 pagineCG Unit-5Vathicoming Vikky100% (1)
- 3d Model SpaceDocumento9 pagine3d Model SpaceAjit BvbNessuna valutazione finora
- Lecture 1 Fundamentals of Image ProcessingDocumento24 pagineLecture 1 Fundamentals of Image Processingsarbjot singhNessuna valutazione finora
- Cad Unit 2Documento73 pagineCad Unit 2Aindrila GangulyNessuna valutazione finora
- Computer Graphics - Visible Surface DetectionDocumento15 pagineComputer Graphics - Visible Surface DetectionSyedkareem_hkgNessuna valutazione finora
- UNIT 4 p1Documento14 pagineUNIT 4 p1fathimashamikNessuna valutazione finora
- CG ch-8 (The Graphic Pipeline)Documento22 pagineCG ch-8 (The Graphic Pipeline)Kay KhineNessuna valutazione finora
- Computer Graphics: BY N.Sathish Kumar AP CSEDocumento24 pagineComputer Graphics: BY N.Sathish Kumar AP CSEمحمد طلال الدبإغNessuna valutazione finora
- Module V-PPT - 2Documento58 pagineModule V-PPT - 2Rajeswari RNessuna valutazione finora
- 3d TransformationDocumento7 pagine3d TransformationPremson SSNessuna valutazione finora
- Visible Surface Determination: CMSC 161: Interactive Computer GraphicsDocumento34 pagineVisible Surface Determination: CMSC 161: Interactive Computer Graphicss_paraisoNessuna valutazione finora
- Computer Graphics Using Opengl, 3 Edition F. S. Hill, Jr. and S. KelleyDocumento57 pagineComputer Graphics Using Opengl, 3 Edition F. S. Hill, Jr. and S. KelleySakirin Bin Haji MuhamedNessuna valutazione finora
- Visible-Surface Detection MethodsDocumento13 pagineVisible-Surface Detection MethodsTejendra Rao MNessuna valutazione finora
- Lecture28!28!16827 3d ClippingDocumento29 pagineLecture28!28!16827 3d ClippingRaghu nathanNessuna valutazione finora
- Kuliah 12 - 3D AnalysisDocumento33 pagineKuliah 12 - 3D AnalysisZulfa NNessuna valutazione finora
- Assignment AnswersDocumento8 pagineAssignment AnswersSteffi CruzNessuna valutazione finora
- Visible-Surface Detection Methods: CS3162 Introduction To Computer GraphicsDocumento10 pagineVisible-Surface Detection Methods: CS3162 Introduction To Computer GraphicsathiraNessuna valutazione finora
- Hidden Surface Removal AlgorithmsDocumento69 pagineHidden Surface Removal Algorithmssumayya shaikNessuna valutazione finora
- Computer Graphics MethodsDocumento9 pagineComputer Graphics Methodsrockafella91100% (1)
- Computer Graphics: Lecture 10 - Computer Animation and Viewing TransformationDocumento43 pagineComputer Graphics: Lecture 10 - Computer Animation and Viewing TransformationMarium FayyazNessuna valutazione finora
- Hill CH 3 Ed 3Documento57 pagineHill CH 3 Ed 3Suada Bőw WéěžýNessuna valutazione finora
- Depth Buffer MethodDocumento7 pagineDepth Buffer MethodSUSHANT SINGHNessuna valutazione finora
- Win ViewingDocumento39 pagineWin ViewingKrishna Moorthy GanesanNessuna valutazione finora
- Computer Graphics (CG CHAP 2)Documento32 pagineComputer Graphics (CG CHAP 2)Vuggam VenkateshNessuna valutazione finora
- Computer GraphicsDocumento10 pagineComputer Graphicsusmanrather78Nessuna valutazione finora
- Computer Graphics Lecture Notes On UNIT 6 PDFDocumento36 pagineComputer Graphics Lecture Notes On UNIT 6 PDFYogi Sarode DhageNessuna valutazione finora
- Survey of Existing SystemDocumento9 pagineSurvey of Existing SystemViolet ShaikhNessuna valutazione finora
- RS-Lecture 11-DigitalImageProcessingDocumento34 pagineRS-Lecture 11-DigitalImageProcessingMohammad ShormanNessuna valutazione finora
- Unit 7Documento4 pagineUnit 7princejiNessuna valutazione finora
- VisualizationDocumento49 pagineVisualizationtituandreescu6810Nessuna valutazione finora
- Introduction To Digital Image Processing: OutlineDocumento24 pagineIntroduction To Digital Image Processing: OutlineMalwatteNessuna valutazione finora
- Computer GraphicsDocumento109 pagineComputer GraphicsAdri JovinNessuna valutazione finora
- Computer Graphics Chapter-1Documento61 pagineComputer Graphics Chapter-1abdi geremewNessuna valutazione finora
- Nidhish Raj Mourya - Depth Buffer Method (Chapter 4)Documento15 pagineNidhish Raj Mourya - Depth Buffer Method (Chapter 4)Nidhish raj mourya100% (1)
- Graphics Viva QNSDocumento5 pagineGraphics Viva QNSAaron RNessuna valutazione finora
- Introductie Beeldanalyse8 2013 (Compatibility Mode)Documento61 pagineIntroductie Beeldanalyse8 2013 (Compatibility Mode)karun_nooney3073Nessuna valutazione finora
- Unit 4 - FinalDocumento38 pagineUnit 4 - FinalOmkar DalviNessuna valutazione finora
- Image Processing: Dept - of Instrumentation Science University of PuneDocumento54 pagineImage Processing: Dept - of Instrumentation Science University of PuneBhupendra KarandikarNessuna valutazione finora
- Cc&a 2Documento164 pagineCc&a 2Gauri SinghNessuna valutazione finora
- Graphics Note 7Documento22 pagineGraphics Note 7Technical DipeshNessuna valutazione finora
- 2 DViewingDocumento48 pagine2 DViewingjithuNessuna valutazione finora
- Graphics Chapter TwoDocumento31 pagineGraphics Chapter TwowalelegneNessuna valutazione finora
- 2-D Viewing Windows Viewports Window To Vieport Mapping ClippingDocumento9 pagine2-D Viewing Windows Viewports Window To Vieport Mapping ClippingdineshdkjNessuna valutazione finora
- Lathe Accessories: Work Holding Tool HoldingDocumento33 pagineLathe Accessories: Work Holding Tool HoldingSuhasNessuna valutazione finora
- Estimation of Machining TimeDocumento6 pagineEstimation of Machining TimeSuhas100% (1)
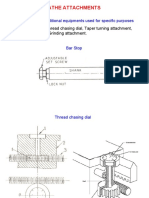
- Lathe AttachmentsDocumento8 pagineLathe AttachmentsSuhasNessuna valutazione finora
- Estimation of Machining TimeDocumento6 pagineEstimation of Machining TimeSuhasNessuna valutazione finora
- Introduction To BoilersDocumento22 pagineIntroduction To BoilersSuhasNessuna valutazione finora
- Unit II Computer GraphicsDocumento30 pagineUnit II Computer GraphicsSuhasNessuna valutazione finora
- Introduction To BoilersDocumento22 pagineIntroduction To BoilersSuhasNessuna valutazione finora
- UNIT-III Automated Drafting FecilitiesDocumento78 pagineUNIT-III Automated Drafting FecilitiesSuhasNessuna valutazione finora
- Unit II Windowing and ClippingDocumento36 pagineUnit II Windowing and ClippingSuhasNessuna valutazione finora
- Unit III Geometrical Modelling Intro and Curve RepresentationDocumento40 pagineUnit III Geometrical Modelling Intro and Curve RepresentationSuhasNessuna valutazione finora
- Unit III Solid ModellingDocumento63 pagineUnit III Solid ModellingSuhasNessuna valutazione finora
- Unit III Surface ModellingDocumento24 pagineUnit III Surface ModellingSuhasNessuna valutazione finora
- UNIT-III Geometric ModelingDocumento139 pagineUNIT-III Geometric ModelingSuhasNessuna valutazione finora
- UNIT-III Geometric ModelingDocumento89 pagineUNIT-III Geometric ModelingSuhasNessuna valutazione finora
- Cad IntroductionDocumento39 pagineCad IntroductionSuhasNessuna valutazione finora
- Design of Stub For Transmission Line TowersDocumento26 pagineDesign of Stub For Transmission Line Towersdebjyoti_das_685% (13)
- Advances in Motor Torque Control PDFDocumento122 pagineAdvances in Motor Torque Control PDFTasos PoteasNessuna valutazione finora
- Sulpiride MonographieDocumento3 pagineSulpiride MonographieMohamed DahmaneNessuna valutazione finora
- On A Stress Resultant Geometrically Exact Shell Model Part IDocumento38 pagineOn A Stress Resultant Geometrically Exact Shell Model Part IzojdbergNessuna valutazione finora
- Expansion Model Test of Expansive Soil in Different Stress State BDocumento11 pagineExpansion Model Test of Expansive Soil in Different Stress State BHuang BenNessuna valutazione finora
- CG Industrial Product OverviewDocumento12 pagineCG Industrial Product Overviewvanessa quispeNessuna valutazione finora
- Utge-4000 Series Water Baths UmDocumento8 pagineUtge-4000 Series Water Baths UmAna FloreaNessuna valutazione finora
- Beyond The Pole-Barn Paradox (Paper 64) PDFDocumento7 pagineBeyond The Pole-Barn Paradox (Paper 64) PDFSambit PandaNessuna valutazione finora
- 27-12-14 SR - Iit-Z (Iz) Co-Spark Jee Main (2011) Ptm-16 Q'paperDocumento23 pagine27-12-14 SR - Iit-Z (Iz) Co-Spark Jee Main (2011) Ptm-16 Q'paperazeemNessuna valutazione finora
- 4 Hydrates & Hydrate PreventionDocumento26 pagine4 Hydrates & Hydrate PreventionWael Badri100% (1)
- SOALAN BiologiDocumento12 pagineSOALAN BiologiLoong Wai FamNessuna valutazione finora
- Hamerlug Unions (Anson)Documento15 pagineHamerlug Unions (Anson)Leonardo ViannaNessuna valutazione finora
- Lecture 3 - Curves in Space and Their TangentDocumento38 pagineLecture 3 - Curves in Space and Their TangentNURUL YAHSIFAH SYQELLA BINTI YAHYA BK21110100Nessuna valutazione finora
- WT Chapter 6 2Documento21 pagineWT Chapter 6 2kanchanabalajiNessuna valutazione finora
- Guidelines On Good Laboratory Practice in Pesticide Residue Analysis CAC/GL 40-1993 ContentDocumento36 pagineGuidelines On Good Laboratory Practice in Pesticide Residue Analysis CAC/GL 40-1993 ContentVishal AroraNessuna valutazione finora
- Swd-Csa-A23.3-04 (Etabs2013)Documento81 pagineSwd-Csa-A23.3-04 (Etabs2013)BJERNessuna valutazione finora
- RT Procedure GeneralDocumento18 pagineRT Procedure GeneralvsnaiduqcNessuna valutazione finora
- Mechanics of Solids Lab ManualDocumento47 pagineMechanics of Solids Lab Manualravi03319100% (1)
- Design of Offshore StructuresDocumento29 pagineDesign of Offshore StructuresJOSE PRASOBH..JNessuna valutazione finora
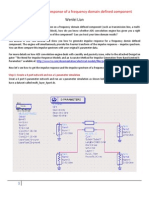
- Impulse Response of Frequency Domain ComponentDocumento17 pagineImpulse Response of Frequency Domain Componentbubo28Nessuna valutazione finora
- 2 B.tech Biotechnology 27 38Documento38 pagine2 B.tech Biotechnology 27 38Anju GuptaNessuna valutazione finora
- N Different Books (N 3) Are Put at Random in A Shelf. Among These Books There Is A ParticularDocumento8 pagineN Different Books (N 3) Are Put at Random in A Shelf. Among These Books There Is A ParticularAnkit Gupta100% (1)
- Plastic MaterialDocumento8 paginePlastic MaterialSenthil Kumar GanesanNessuna valutazione finora
- Vibration Analysis, Control and Optimum Accelerometer Placement For Successful Vibrations TestsDocumento44 pagineVibration Analysis, Control and Optimum Accelerometer Placement For Successful Vibrations TestsVyankatesh AshtekarNessuna valutazione finora
- Vehicle Dynamics Lecture05Documento28 pagineVehicle Dynamics Lecture05Rahul KadbeNessuna valutazione finora
- Soil Science: Classification of PedologyDocumento24 pagineSoil Science: Classification of Pedologyekush amar100% (1)
- Rankine Cycle Notes PDFDocumento6 pagineRankine Cycle Notes PDFmizpah mae jolito0% (1)
- ReiewDocumento19 pagineReiewcullen bohannonNessuna valutazione finora
- Physics Paper 3 TZ1 SL MarkschemeDocumento17 paginePhysics Paper 3 TZ1 SL MarkschemeRᴇᴀʟ RᴜᴋʜsᴀʀNessuna valutazione finora