Potrebbero piacerti anche
- Modeling of Complex Systems: Application to Aeronautical DynamicsDa EverandModeling of Complex Systems: Application to Aeronautical DynamicsNessuna valutazione finora
- Flat Earth ModelDocumento11 pagineFlat Earth ModelversineNessuna valutazione finora
- ASC-mod 3-Dynamic Longitudinal StabilityDocumento32 pagineASC-mod 3-Dynamic Longitudinal StabilityJason JeevanNessuna valutazione finora
- Pressure Vessel and Stacks Field Repair ManualDa EverandPressure Vessel and Stacks Field Repair ManualValutazione: 4 su 5 stelle4/5 (4)
- Aerodynamic Characteristics of A Quadcopter With Propellers: Articles You May Be Interested inDocumento8 pagineAerodynamic Characteristics of A Quadcopter With Propellers: Articles You May Be Interested inWidyahsri EllaNessuna valutazione finora
- Aerodynamics For StudentsDocumento6 pagineAerodynamics For StudentsSelva RajNessuna valutazione finora
- Review of Propeller-Wing Aerodynamic InterferenceDocumento21 pagineReview of Propeller-Wing Aerodynamic Interferencekrishnamoorthy_krishNessuna valutazione finora
- Aerodynamics For Students - BladeDocumento6 pagineAerodynamics For Students - BladeGaurang 'TottaPhilic' GuptaNessuna valutazione finora
- National Advisory Committee For AeronauticsDocumento49 pagineNational Advisory Committee For AeronauticsElvir PecoNessuna valutazione finora
- Modeling of Aerodynamic Flutter On A NACA 4412 Airfoil Wind Blade (Final)Documento7 pagineModeling of Aerodynamic Flutter On A NACA 4412 Airfoil Wind Blade (Final)Alfa BetaNessuna valutazione finora
- Transient Aerodynamics LoadsDocumento40 pagineTransient Aerodynamics LoadsGuille GarofaloNessuna valutazione finora
- Navigation Equations in the Earth Centered Earth Fixed FrameDocumento17 pagineNavigation Equations in the Earth Centered Earth Fixed FrametangphamvanNessuna valutazione finora
- Local Momentum Theory and Its Application To The Rotary WingDocumento9 pagineLocal Momentum Theory and Its Application To The Rotary WingaqstaxNessuna valutazione finora
- V12 04 07 Hac From Mme PDFDocumento18 pagineV12 04 07 Hac From Mme PDFHariharanNessuna valutazione finora
- Dhruba Paul: HrubaDocumento26 pagineDhruba Paul: HrubaDhruba PaulNessuna valutazione finora
- Estimating Vertical Drag On Helicopter Fuselage During HoveringDocumento7 pagineEstimating Vertical Drag On Helicopter Fuselage During HoveringPeter IjaramendiNessuna valutazione finora
- Quadcopter Propeller Design and Performance Analysis: Endrowednes Kuantama, Dan Craciun, Ioan Tarca and Radu TarcaDocumento9 pagineQuadcopter Propeller Design and Performance Analysis: Endrowednes Kuantama, Dan Craciun, Ioan Tarca and Radu Tarcanguyễn namNessuna valutazione finora
- Some Features of Supersonic DragDocumento7 pagineSome Features of Supersonic Dragsharjeelnawaz15Nessuna valutazione finora
- Lab 7 DraftDocumento22 pagineLab 7 Draftapi-252392235Nessuna valutazione finora
- Integrated Flight Dynamics Modeling of Flexible Aircraft with Aeroelastic-Propulsive CouplingDocumento20 pagineIntegrated Flight Dynamics Modeling of Flexible Aircraft with Aeroelastic-Propulsive Couplingbook_finder04Nessuna valutazione finora
- NR - Numerical Model of Single Main Rotor Helicopter DynamicsDocumento10 pagineNR - Numerical Model of Single Main Rotor Helicopter DynamicsHossam T BadranNessuna valutazione finora
- WIKI Lifting-Line TheoryDocumento8 pagineWIKI Lifting-Line TheoryHossam T BadranNessuna valutazione finora
- Landing Gear Shimmy Stress AnalysisDocumento13 pagineLanding Gear Shimmy Stress AnalysisNoshin NugawelaNessuna valutazione finora
- Optimisation of Wind Turbine BladesDocumento9 pagineOptimisation of Wind Turbine BladesmannoqamarNessuna valutazione finora
- Nonlinear Robust Tracking Control of QuadrotorsDocumento10 pagineNonlinear Robust Tracking Control of QuadrotorsCristianSouzaNessuna valutazione finora
- Aerodinamika FrizbijaDocumento7 pagineAerodinamika FrizbijashepeNessuna valutazione finora
- Steady and Unsteady Flow Simulation of A Combined Jet Flap and Coanda Jet Effects On A 2D Airfoil Aerodynamic PerformanceDocumento6 pagineSteady and Unsteady Flow Simulation of A Combined Jet Flap and Coanda Jet Effects On A 2D Airfoil Aerodynamic PerformancefasterNessuna valutazione finora
- Optimising Dragline Slew Torque Reduces FatigueDocumento6 pagineOptimising Dragline Slew Torque Reduces Fatiguesoh_vakiliNessuna valutazione finora
- ME 464 CEP Report Pitch Control Tail-PlaneDocumento10 pagineME 464 CEP Report Pitch Control Tail-PlaneShahmirBalochNessuna valutazione finora
- Evaluating rotor imbalance in flexibly mounted machines using vibration measurementsDocumento13 pagineEvaluating rotor imbalance in flexibly mounted machines using vibration measurementsCésar TapiaNessuna valutazione finora
- Brescianini Hehn Dandrea Pole AcrobaticsDocumento8 pagineBrescianini Hehn Dandrea Pole AcrobaticsdflamsheepsNessuna valutazione finora
- Aeroelastic Divergence of Composite Cantilever Swept WingsDocumento9 pagineAeroelastic Divergence of Composite Cantilever Swept WingsVibhanshu VermaNessuna valutazione finora
- Helicopter StabilityDocumento13 pagineHelicopter Stabilitymanikandan_murugaiahNessuna valutazione finora
- NASA Report - Theory For Computing Span Loads and Stability Derivatives Due To Side Slip, Yawing, and Rolling For Wings in Subsonic Compressible FlowDocumento79 pagineNASA Report - Theory For Computing Span Loads and Stability Derivatives Due To Side Slip, Yawing, and Rolling For Wings in Subsonic Compressible Flowmssj87Nessuna valutazione finora
- Three Axis Rotary PlatformDocumento6 pagineThree Axis Rotary PlatformSudhanwa KulkarniNessuna valutazione finora
- Dynamic Modelling and Experimental Identification of Four Rotors Helicopter ParametersDocumento7 pagineDynamic Modelling and Experimental Identification of Four Rotors Helicopter Parametersali.azim1380Nessuna valutazione finora
- Aerospace Engineering ControlsDocumento12 pagineAerospace Engineering Controlsbbarry138Nessuna valutazione finora
- Linear Aerodynamic Wing DesignDocumento18 pagineLinear Aerodynamic Wing DesignAshutosh VermaNessuna valutazione finora
- ME 410 PresentationDocumento15 pagineME 410 PresentationMahmut KILIÇNessuna valutazione finora
- Microwave-Propelled Sails and Their ControlDocumento6 pagineMicrowave-Propelled Sails and Their ControlmegustalazorraNessuna valutazione finora
- Blade Element Momentum TheoryDocumento11 pagineBlade Element Momentum TheoryAnonymous qRe192Nessuna valutazione finora
- Ejercicios Modeling of Dynamic Systems1Documento6 pagineEjercicios Modeling of Dynamic Systems1J Jick PerSeiNessuna valutazione finora
- Experimental Observation of Wing Rock Phenomenon on Delta WingDocumento13 pagineExperimental Observation of Wing Rock Phenomenon on Delta WingChegrani AhmedNessuna valutazione finora
- Lifting-Line Theory - WikipediaDocumento29 pagineLifting-Line Theory - WikipediaSãröj ShâhNessuna valutazione finora
- 353 2 A Elruby Final 2Documento5 pagine353 2 A Elruby Final 2Lucas SilvaNessuna valutazione finora
- A Numerical Exploration of Parameter Dependence in Power Optimal Flapping FlightDocumento31 pagineA Numerical Exploration of Parameter Dependence in Power Optimal Flapping FlightxebitNessuna valutazione finora
- Numerical Simulation of A Flow Around An Unmanned Aerial VehicleDocumento4 pagineNumerical Simulation of A Flow Around An Unmanned Aerial VehicleGeoff BranniganNessuna valutazione finora
- Vasconcellos Et Al 6pagesDocumento6 pagineVasconcellos Et Al 6pagessepid123Nessuna valutazione finora
- Yoon-Kyu Lee1 Shock ObserverDocumento8 pagineYoon-Kyu Lee1 Shock ObserverMohammed ImranNessuna valutazione finora
- Trim SolutionDocumento40 pagineTrim Solutionendoparasite100% (1)
- Modeling and control of 4-wheel skid-steering robotDocumento20 pagineModeling and control of 4-wheel skid-steering robotpqthaiNessuna valutazione finora
- FSI Projects HLewis Paper1 PDFDocumento26 pagineFSI Projects HLewis Paper1 PDFCássio SversutNessuna valutazione finora
- Aerodynamic Analysis Using XFLR-5Documento12 pagineAerodynamic Analysis Using XFLR-5Alejandro García González100% (1)
- Calculation of Unbalanced Magnetic Pull in A Salient-Pole Synchronous GeneratorDocumento7 pagineCalculation of Unbalanced Magnetic Pull in A Salient-Pole Synchronous GeneratorNirav PathakNessuna valutazione finora
- Experimental drag polar of the F-16 Falcon using wind tunnel testsDocumento11 pagineExperimental drag polar of the F-16 Falcon using wind tunnel teststhoundeNessuna valutazione finora
- Matecconf Bultrans2017 01007Documento5 pagineMatecconf Bultrans2017 01007Jinsan JinsanNessuna valutazione finora
- Mode The High-Speed Navigation of Road: VehiclesDocumento5 pagineMode The High-Speed Navigation of Road: Vehiclesali_raza117Nessuna valutazione finora
- F-16 Dynamic ModelDocumento19 pagineF-16 Dynamic ModelMuhammad AbdullahNessuna valutazione finora
- A Dynamic Stability Rocket SimulatorDocumento16 pagineA Dynamic Stability Rocket SimulatorĐăng Khôi TrầnNessuna valutazione finora
- Programr 4Documento2 pagineProgramr 4Bijay KumarNessuna valutazione finora
- Composite Leaf SpringDocumento7 pagineComposite Leaf SpringvikasNessuna valutazione finora
- Computer Aided DesignDocumento29 pagineComputer Aided Designryanho99Nessuna valutazione finora
- Hella Headlight Adjustment PDFDocumento24 pagineHella Headlight Adjustment PDFavinashmenonNessuna valutazione finora
- Matlab IfstatementDocumento2 pagineMatlab IfstatementBijay KumarNessuna valutazione finora
- The Design of Spherical 4R Linkages For Four Specified OrientationsDocumento15 pagineThe Design of Spherical 4R Linkages For Four Specified OrientationsBijay KumarNessuna valutazione finora
- Matlab Finite Element Modeling For Materials Engineers Using MATLABDocumento74 pagineMatlab Finite Element Modeling For Materials Engineers Using MATLABPujara ManishNessuna valutazione finora
- More PracticeDocumento2 pagineMore PracticeBijay KumarNessuna valutazione finora
- Image BlurDocumento2 pagineImage BlurBijay KumarNessuna valutazione finora
- Cad Btech 1Documento26 pagineCad Btech 1Bijay KumarNessuna valutazione finora
- HMEA Lighting Systems-Technical BrochureDocumento9 pagineHMEA Lighting Systems-Technical BrochureBijay KumarNessuna valutazione finora
- FRFRDocumento2 pagineFRFRBijay KumarNessuna valutazione finora
- Tom MechanismDocumento1 paginaTom MechanismBijay KumarNessuna valutazione finora
- FEM Assignment #02 SolutionsDocumento1 paginaFEM Assignment #02 SolutionsBijay KumarNessuna valutazione finora
- Modeling and controlling a 6-DOF robotic armDocumento8 pagineModeling and controlling a 6-DOF robotic armBijay KumarNessuna valutazione finora
- Hella Headlight Adjustment PDFDocumento24 pagineHella Headlight Adjustment PDFavinashmenonNessuna valutazione finora
- Research Methodology Full Notes PDFDocumento87 pagineResearch Methodology Full Notes PDFwgl.joshi100% (16)
- Tomdwdwdqwed RVGRVVDocumento14 pagineTomdwdwdqwed RVGRVVBijay KumarNessuna valutazione finora
- OnDocumento30 pagineOnBijay KumarNessuna valutazione finora
- FRFRDocumento2 pagineFRFRBijay KumarNessuna valutazione finora
- Matlab DiggrgrgrgDocumento4 pagineMatlab DiggrgrgrgBijay KumarNessuna valutazione finora
- Two-Dimensional Finite Element Analysis Using Triangular ElementsDocumento47 pagineTwo-Dimensional Finite Element Analysis Using Triangular ElementshasankayganNessuna valutazione finora
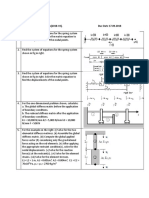
- New Doc 2018-12-18 10.21.38Documento10 pagineNew Doc 2018-12-18 10.21.38Bijay KumarNessuna valutazione finora
- GK Tornado Final - pdf-87 PDFDocumento54 pagineGK Tornado Final - pdf-87 PDFBijay KumarNessuna valutazione finora
- Matlab DigDocumento1 paginaMatlab DigBijay KumarNessuna valutazione finora
- r33 RDocumento8 paginer33 RRonel ViolantaNessuna valutazione finora
- BUYINGDocumento9 pagineBUYINGBijay KumarNessuna valutazione finora
- Infsdwde 5454Documento1 paginaInfsdwde 5454Bijay KumarNessuna valutazione finora
- LicenseaDocumento3 pagineLicenseaဖိုး စူးစမ္းNessuna valutazione finora
- Prof. Dr.-Ing. Uwe Franzke ILK Dresden Cooling Loads - The New Standard VDI 2078Documento25 pagineProf. Dr.-Ing. Uwe Franzke ILK Dresden Cooling Loads - The New Standard VDI 2078Sashko GjorgievskiNessuna valutazione finora
- Spidex OperatingDocumento10 pagineSpidex Operatingwalk001Nessuna valutazione finora
- API 510 PC 20 31 Aug05 Final Exam OpenDocumento4 pagineAPI 510 PC 20 31 Aug05 Final Exam OpennikafiqNessuna valutazione finora
- Exportar Páginas Meriam Kraige Engineering Mechanics Statics 7th TXTBKDocumento1 paginaExportar Páginas Meriam Kraige Engineering Mechanics Statics 7th TXTBKabrahamrv44Nessuna valutazione finora
- Thermodynamics: Prof. Dr. Ali KodalDocumento116 pagineThermodynamics: Prof. Dr. Ali KodalThomas VerdugoNessuna valutazione finora
- Type 6010, 6011, and Whisper Disk Inline Diffusers: Bulletin 80.1:6010Documento6 pagineType 6010, 6011, and Whisper Disk Inline Diffusers: Bulletin 80.1:6010Datt NguyenNessuna valutazione finora
- Double-effect evaporator problem - steam flow rate, solids content, steam economy, cooling water flowDocumento19 pagineDouble-effect evaporator problem - steam flow rate, solids content, steam economy, cooling water flowKristiani Dewi PasaribuNessuna valutazione finora
- Relativity Theory PPT (Group-1'B')Documento15 pagineRelativity Theory PPT (Group-1'B')Akash RajNessuna valutazione finora
- How smartphone camera specs affect low light performanceDocumento2 pagineHow smartphone camera specs affect low light performanceSatyendra KumarNessuna valutazione finora
- Unit 7 Future Home (English For Technology 2)Documento2 pagineUnit 7 Future Home (English For Technology 2)Set S. Pirath0% (1)
- Hermetic CAN&CNFDocumento20 pagineHermetic CAN&CNFkikechuNessuna valutazione finora
- Seismic Response Analysis of Multispan Bridge Using FEMDocumento8 pagineSeismic Response Analysis of Multispan Bridge Using FEMParth TrivediNessuna valutazione finora
- Christiaan HuygensDocumento3 pagineChristiaan HuygenssarayooNessuna valutazione finora
- Putro 2017Documento93 paginePutro 2017Yon tinyayaNessuna valutazione finora
- Inverted SiphonDocumento39 pagineInverted Siphonalee67% (3)
- NMRDocumento173 pagineNMRঋ ত্বিকNessuna valutazione finora
- Phase Diagram Analysis of Metal AlloysDocumento20 paginePhase Diagram Analysis of Metal AlloysMuhd AriffNessuna valutazione finora
- Rate of Reaction FactorsDocumento3 pagineRate of Reaction FactorsFungai mhlangaNessuna valutazione finora
- Hq153en Balinit-Dlc SeriesDocumento4 pagineHq153en Balinit-Dlc SeriesJoão TarelhoNessuna valutazione finora
- ThyristorsDocumento41 pagineThyristorsMustafa KamalNessuna valutazione finora
- Vertical Irregularities in StructuresDocumento3 pagineVertical Irregularities in StructuresAbhijit SarkarNessuna valutazione finora
- Adama Science and Technology University School of Applied Natural Science Department of Applied MathematicsDocumento9 pagineAdama Science and Technology University School of Applied Natural Science Department of Applied MathematicsALEMAYEHUNessuna valutazione finora
- App C PDFDocumento2 pagineApp C PDFRustika SafitriNessuna valutazione finora
- IM DE Chapter 1 Lect 2 - ELIMINATION OF CONSTANTSDocumento3 pagineIM DE Chapter 1 Lect 2 - ELIMINATION OF CONSTANTSAllan Gabriel LariosaNessuna valutazione finora
- Master Thesis, Stig MadlandDocumento208 pagineMaster Thesis, Stig Madlandbubbly_blu2Nessuna valutazione finora
- Langrangian MechanicsDocumento41 pagineLangrangian MechanicsLuthfiNessuna valutazione finora
- 225 Fall 2013 PDFDocumento518 pagine225 Fall 2013 PDFcombatps1Nessuna valutazione finora
- EN 287-1-2011-Otkl (Grupi Celici)Documento1 paginaEN 287-1-2011-Otkl (Grupi Celici)Vasko MandilNessuna valutazione finora
- Numerical Simulation of Seismic Slope Stability Analysis Based On Tension-Shear Failure MechanismDocumento12 pagineNumerical Simulation of Seismic Slope Stability Analysis Based On Tension-Shear Failure MechanismPaul Pinedo VilcahuamánNessuna valutazione finora
- Some Factors That Affects SolubilityDocumento3 pagineSome Factors That Affects SolubilityrielleST0% (1)
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseDa EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseValutazione: 4.5 su 5 stelle4.5/5 (50)
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionDa EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionValutazione: 4.5 su 5 stelle4.5/5 (3)
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsDa EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsValutazione: 3.5 su 5 stelle3.5/5 (3)
- Rolling Bearing Tribology: Tribology and Failure Modes of Rolling Element BearingsDa EverandRolling Bearing Tribology: Tribology and Failure Modes of Rolling Element BearingsNessuna valutazione finora
- Piping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationDa EverandPiping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationValutazione: 4 su 5 stelle4/5 (18)
- Pressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedDa EverandPressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedValutazione: 5 su 5 stelle5/5 (1)
- The Laws of Thermodynamics: A Very Short IntroductionDa EverandThe Laws of Thermodynamics: A Very Short IntroductionValutazione: 4.5 su 5 stelle4.5/5 (10)
- Handbook of Mechanical and Materials EngineeringDa EverandHandbook of Mechanical and Materials EngineeringValutazione: 5 su 5 stelle5/5 (4)
- Introduction to Applied Thermodynamics: The Commonwealth and International Library: Mechanical Engineering DivisionDa EverandIntroduction to Applied Thermodynamics: The Commonwealth and International Library: Mechanical Engineering DivisionValutazione: 2.5 su 5 stelle2.5/5 (3)
- Oil and Gas Pipelines: Integrity and Safety HandbookDa EverandOil and Gas Pipelines: Integrity and Safety HandbookNessuna valutazione finora
- Quantum Mechanics 4: Spin, Lasers, Pauli Exclusion & Barrier PenetrationDa EverandQuantum Mechanics 4: Spin, Lasers, Pauli Exclusion & Barrier PenetrationValutazione: 1 su 5 stelle1/5 (1)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsDa EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNessuna valutazione finora
- Waves and Beaches: The Powerful Dynamics of Sea and CoastDa EverandWaves and Beaches: The Powerful Dynamics of Sea and CoastValutazione: 4 su 5 stelle4/5 (1)
- Albert Einstein's Theory Of Relativity Explained SimplyDa EverandAlbert Einstein's Theory Of Relativity Explained SimplyNessuna valutazione finora
- 1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideDa Everand1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideValutazione: 3.5 su 5 stelle3.5/5 (7)
- Machinery Failure Analysis Handbook: Sustain Your Operations and Maximize UptimeDa EverandMachinery Failure Analysis Handbook: Sustain Your Operations and Maximize UptimeValutazione: 3.5 su 5 stelle3.5/5 (4)
- Operational Amplifier Circuits: Analysis and DesignDa EverandOperational Amplifier Circuits: Analysis and DesignValutazione: 4.5 su 5 stelle4.5/5 (2)