Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Audi - US A7 - 2014-2Documento49 pagineAudi - US A7 - 2014-2Anil Kumar BNessuna valutazione finora
- A Comparative Study of Gender and Age Classification in Speech SignalsDocumento12 pagineA Comparative Study of Gender and Age Classification in Speech SignalsAnil Kumar BNessuna valutazione finora
- Audi - US TDi - 2007Documento11 pagineAudi - US TDi - 2007Anil Kumar BNessuna valutazione finora
- Audi - US Full Line - 2009Documento16 pagineAudi - US Full Line - 2009Anil Kumar BNessuna valutazione finora
- Human Gender and Age Detection Based On Attributes of FaceDocumento16 pagineHuman Gender and Age Detection Based On Attributes of FaceAnil Kumar BNessuna valutazione finora
- Human Age and Gender Estimation Using Facial Image ProcessingDocumento5 pagineHuman Age and Gender Estimation Using Facial Image ProcessingAnil Kumar BNessuna valutazione finora
- Computer vision techniques for road pothole detectionDocumento16 pagineComputer vision techniques for road pothole detectionAnil Kumar BNessuna valutazione finora
- Audi A4-Product-Guide 2020Documento31 pagineAudi A4-Product-Guide 2020Mai PhaNessuna valutazione finora
- SCI PaperDocumento17 pagineSCI PaperAnil Kumar BNessuna valutazione finora
- Fusion of Local Binary Pattern and Local Phase Quantization Features Set For Gender Classification Using FingerprintsDocumento8 pagineFusion of Local Binary Pattern and Local Phase Quantization Features Set For Gender Classification Using FingerprintsAnil Kumar BNessuna valutazione finora
- The All New Mercedes AMG A 35 4MATICDocumento47 pagineThe All New Mercedes AMG A 35 4MATICAnil Kumar BNessuna valutazione finora
- Age Estimation and Gender Recognition Technique Using Deep LearningDocumento8 pagineAge Estimation and Gender Recognition Technique Using Deep LearningIJRASETPublicationsNessuna valutazione finora
- Applsci 12 05320 v2Documento15 pagineApplsci 12 05320 v2Anil Kumar BNessuna valutazione finora
- PN - DFCBU - 2020 - 01 - JAN - TATA MOTORS LIMITED - TIGOR - 11325010 - SIZE 297 (W) X 210 (H) MM - TIGOR MCE LEAFLET - For WebDocumento2 paginePN - DFCBU - 2020 - 01 - JAN - TATA MOTORS LIMITED - TIGOR - 11325010 - SIZE 297 (W) X 210 (H) MM - TIGOR MCE LEAFLET - For WebDevesh BholeNessuna valutazione finora
- A Feasibility Study On Real-Time Gender Recognition: IjarcceDocumento7 pagineA Feasibility Study On Real-Time Gender Recognition: IjarcceAnil Kumar BNessuna valutazione finora
- Age and Gender Identification in Social MediaDocumento8 pagineAge and Gender Identification in Social MediaAnil Kumar BNessuna valutazione finora
- A Study On Face Recognition Techniques With Age and Gender ClassificationDocumento6 pagineA Study On Face Recognition Techniques With Age and Gender ClassificationAnil Kumar BNessuna valutazione finora
- Age and gender classification with machine learningDocumento12 pagineAge and gender classification with machine learningAnil Kumar BNessuna valutazione finora
- Joint Estimation of Age and Gender From Unconstrained Face Images Using Lightweight Multi-Task CNN For Mobile ApplicationsDocumento4 pagineJoint Estimation of Age and Gender From Unconstrained Face Images Using Lightweight Multi-Task CNN For Mobile ApplicationsAnil Kumar BNessuna valutazione finora
- Age and Gender Prediction From Face Images Using Attentional Convolutional NetworkDocumento6 pagineAge and Gender Prediction From Face Images Using Attentional Convolutional NetworkAnil Kumar BNessuna valutazione finora
- Age and Gender Prediction Using Deep Convolutional Neural NetworksDocumento6 pagineAge and Gender Prediction Using Deep Convolutional Neural NetworksAnil Kumar BNessuna valutazione finora
- Age and Gender Recognition Using Multi-Task CNN: Duc-Quang Vu, Thi-Thu-Trang Phung, Chien-Yao Wang and Jia-Ching WangDocumento5 pagineAge and Gender Recognition Using Multi-Task CNN: Duc-Quang Vu, Thi-Thu-Trang Phung, Chien-Yao Wang and Jia-Ching WangAnil Kumar BNessuna valutazione finora
- Age and Gender Estimation Using Deep Residual Learning NetworkDocumento3 pagineAge and Gender Estimation Using Deep Residual Learning NetworkAnil Kumar BNessuna valutazione finora
- Automatic Age and Gender Estimation Using Deep Learning and Extreme Learning MachineDocumento11 pagineAutomatic Age and Gender Estimation Using Deep Learning and Extreme Learning MachineAnil Kumar BNessuna valutazione finora
- Age and Gender Classification Using Multiple Convolutional Neural NetworkDocumento11 pagineAge and Gender Classification Using Multiple Convolutional Neural NetworkAnil Kumar BNessuna valutazione finora
- Age Group and Gender Estimation in The Wild With Deep Ror ArchitectureDocumento11 pagineAge Group and Gender Estimation in The Wild With Deep Ror ArchitectureAnil Kumar BNessuna valutazione finora
- Age Group Classification and Gender Recognition From Speech With Temporal Convolutional Neural NetworksDocumento18 pagineAge Group Classification and Gender Recognition From Speech With Temporal Convolutional Neural NetworksAnil Kumar BNessuna valutazione finora
- A Study On Gender and Age Classification As A Vital Tools in The Identification and Verification SystemDocumento13 pagineA Study On Gender and Age Classification As A Vital Tools in The Identification and Verification SystemAnil Kumar BNessuna valutazione finora
- Sensors: Gender and Age Estimation Methods Based On Speech Using Deep Neural NetworksDocumento18 pagineSensors: Gender and Age Estimation Methods Based On Speech Using Deep Neural NetworksAnil Kumar BNessuna valutazione finora
- Real-Time Embedded Age and Gender Classification in Unconstrained VideoDocumento9 pagineReal-Time Embedded Age and Gender Classification in Unconstrained VideoAnil Kumar BNessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
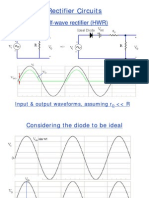
- Rectifier Circuits: Half-Wave Rectifier (HWR)Documento18 pagineRectifier Circuits: Half-Wave Rectifier (HWR)Md ArifNessuna valutazione finora
- DIWH Series: Diko Elektrikli Cihazlar San. Ve Tic. A.ŞDocumento19 pagineDIWH Series: Diko Elektrikli Cihazlar San. Ve Tic. A.ŞEric ToroNessuna valutazione finora
- Bluetooth Low Energy (BLE) 5 Module BT840F: SpecificationsDocumento26 pagineBluetooth Low Energy (BLE) 5 Module BT840F: SpecificationsArthit SomrangNessuna valutazione finora
- Installation and Use Instructions 7 Day Electronic Timer (TE103)Documento2 pagineInstallation and Use Instructions 7 Day Electronic Timer (TE103)eeindustrialNessuna valutazione finora
- HH100-HH120 English PDFDocumento18 pagineHH100-HH120 English PDFsil doroNessuna valutazione finora
- Radar Vs Stealth - Passive Radar & FutureDocumento8 pagineRadar Vs Stealth - Passive Radar & Futurelynx437Nessuna valutazione finora
- Samsung - NP R530 NP R730.Bremen L.ba41 XXXXXA - Rev.1.0.schematicsDocumento59 pagineSamsung - NP R530 NP R730.Bremen L.ba41 XXXXXA - Rev.1.0.schematicsTuput Amadre100% (1)
- Kurzweil MicropianoDocumento24 pagineKurzweil Micropianoestereo8Nessuna valutazione finora
- W810i Service ManualDocumento53 pagineW810i Service Manualamdomalik100% (2)
- A819 PDFDocumento4 pagineA819 PDFjpauloaliancaNessuna valutazione finora
- 3 Operation Instructions, PLC SystemDocumento25 pagine3 Operation Instructions, PLC SystemheemaNessuna valutazione finora
- Genaral Catalog PLC PanasonicDocumento36 pagineGenaral Catalog PLC Panasonicpeter08068350% (2)
- Gseriesr2.0 Printer Spare Parts List en UsDocumento14 pagineGseriesr2.0 Printer Spare Parts List en UsBrahiam ColmenaresNessuna valutazione finora
- Daily DigestDocumento2 pagineDaily DigesttechsmartNessuna valutazione finora
- Switching Power Supply Design Review - 60 Watt Flyback Regulator by Raoji Patel and Glen FRFTZ Slup072Documento17 pagineSwitching Power Supply Design Review - 60 Watt Flyback Regulator by Raoji Patel and Glen FRFTZ Slup072Burlacu AndreiNessuna valutazione finora
- Ch02 Wal MartDocumento1 paginaCh02 Wal MartMuhammad Shafiq GulNessuna valutazione finora
- User Manual: Tracer-AN SeriesDocumento44 pagineUser Manual: Tracer-AN SeriesSarah WoodNessuna valutazione finora
- Actividad 2. Comparativo de Circuitos DigitalesDocumento8 pagineActividad 2. Comparativo de Circuitos DigitalesArmando Guerrero RochaNessuna valutazione finora
- Bose Lifestyle 28 Repair - Schematics PDFDocumento32 pagineBose Lifestyle 28 Repair - Schematics PDFAurelio Machado75% (4)
- Ret620 Ansi BRDocumento4 pagineRet620 Ansi BRFernando TamayoNessuna valutazione finora
- C100 Service Training Manual: 3.2L Engine Mechanical Participant HandbookDocumento54 pagineC100 Service Training Manual: 3.2L Engine Mechanical Participant Handbooksertex_jo83% (6)
- RBS 6000 Technical DataDocumento15 pagineRBS 6000 Technical DataMohammed Makled100% (1)
- Solar Inverter XC Op Manual 990 4612DDocumento76 pagineSolar Inverter XC Op Manual 990 4612DPradeep Kumar SukumaranNessuna valutazione finora
- Metal Oxides Semiconductor CeramicsDocumento14 pagineMetal Oxides Semiconductor Ceramicsumarasad1100% (1)
- Analog Electronics - U. A. Bakshi and A. P. GodseDocumento124 pagineAnalog Electronics - U. A. Bakshi and A. P. GodseIrfan M IrshadNessuna valutazione finora
- Downloads Drivers Ds800 Development Suite Software 4 1 Ds800 en 133388Documento2 pagineDownloads Drivers Ds800 Development Suite Software 4 1 Ds800 en 133388saoNessuna valutazione finora
- 063927Documento4 pagine063927mprice2461Nessuna valutazione finora
- 14Φ Series Metal Oxide Varistor (MOV) Data Sheet: FeaturesDocumento12 pagine14Φ Series Metal Oxide Varistor (MOV) Data Sheet: Featuresirensy vivasNessuna valutazione finora
- User's Manual: STUF-200H Handheld Ultrasonic FlowmeterDocumento76 pagineUser's Manual: STUF-200H Handheld Ultrasonic FlowmeterLupu Vasile0% (1)
- Video Processor Vep-2100fDocumento18 pagineVideo Processor Vep-2100fVictor BlancoNessuna valutazione finora