Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- 3008 Lecture5 Random Signal AnalysisDocumento16 pagine3008 Lecture5 Random Signal AnalysisbalkyderNessuna valutazione finora
- Continuous Random Variables: - A Continuous Random Variable Has An Set of Possible ValuesDocumento4 pagineContinuous Random Variables: - A Continuous Random Variable Has An Set of Possible ValuessukyimoNessuna valutazione finora
- Discrete Random Variables: - A Discrete Random Variable Takes On A Number of Possible ValuesDocumento4 pagineDiscrete Random Variables: - A Discrete Random Variable Takes On A Number of Possible ValuessukyimoNessuna valutazione finora
- Scan 20200423 SjdhsDocumento1 paginaScan 20200423 SjdhssukyimoNessuna valutazione finora
- Abstract TemplateDocumento1 paginaAbstract TemplatesukyimoNessuna valutazione finora
- Rulers, Verniers, Micrometers and Measurement UncertaintyDocumento30 pagineRulers, Verniers, Micrometers and Measurement UncertaintysukyimoNessuna valutazione finora
- ASIO4ALL v2 Instruction ManualDocumento11 pagineASIO4ALL v2 Instruction ManualDanny_Grafix_1728Nessuna valutazione finora
- Coherence PDFDocumento3 pagineCoherence PDFsukyimoNessuna valutazione finora
- LicenseDocumento6 pagineLicensemerrysun22Nessuna valutazione finora
- ASIO4ALL v2 Instruction ManualDocumento11 pagineASIO4ALL v2 Instruction ManualDanny_Grafix_1728Nessuna valutazione finora
- PSF Cellphone CameraDocumento25 paginePSF Cellphone CamerasukyimoNessuna valutazione finora
- Checkers PDFDocumento1 paginaCheckers PDFsukyimoNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Service Quality Dimensions of A Philippine State UDocumento10 pagineService Quality Dimensions of A Philippine State UVilma SottoNessuna valutazione finora
- Topic: Grammatical Issues: What Are Parts of Speech?Documento122 pagineTopic: Grammatical Issues: What Are Parts of Speech?AK AKASHNessuna valutazione finora
- بتول ماجد سعيد (تقرير السيطرة على تلوث الهواء)Documento5 pagineبتول ماجد سعيد (تقرير السيطرة على تلوث الهواء)Batool MagedNessuna valutazione finora
- KIA SONET BookingDocketDocumento7 pagineKIA SONET BookingDocketRajesh ThulasiramNessuna valutazione finora
- PDS DeltaV SimulateDocumento9 paginePDS DeltaV SimulateJesus JuarezNessuna valutazione finora
- Aashto M288-17 Product Selection GuideDocumento1 paginaAashto M288-17 Product Selection GuideDem DemNessuna valutazione finora
- Regulasi KampenDocumento81 pagineRegulasi KampenIrWaN Dompu100% (2)
- Anker Soundcore Mini, Super-Portable Bluetooth SpeakerDocumento4 pagineAnker Soundcore Mini, Super-Portable Bluetooth SpeakerM.SaadNessuna valutazione finora
- Pyramid Type Plate Bending MachineDocumento10 paginePyramid Type Plate Bending MachineAswin JosephNessuna valutazione finora
- Static Electrification: Standard Test Method ForDocumento10 pagineStatic Electrification: Standard Test Method Forastewayb_964354182Nessuna valutazione finora
- 5620 SAM Rel 14 License Point Configuration ToolDocumento416 pagine5620 SAM Rel 14 License Point Configuration Toolluis100% (1)
- 1188 2665 1 SMDocumento12 pagine1188 2665 1 SMRita BangunNessuna valutazione finora
- How Transformers WorkDocumento15 pagineHow Transformers Worktim schroderNessuna valutazione finora
- Transportation of CementDocumento13 pagineTransportation of CementKaustubh Joshi100% (1)
- Statistical Process Control and Process Capability PPT EXPLANATIONDocumento2 pagineStatistical Process Control and Process Capability PPT EXPLANATIONJohn Carlo SantiagoNessuna valutazione finora
- I. Choose The Best Option (From A, B, C or D) To Complete Each Sentence: (3.0pts)Documento5 pagineI. Choose The Best Option (From A, B, C or D) To Complete Each Sentence: (3.0pts)thmeiz.17sNessuna valutazione finora
- Tomb of Archimedes (Sources)Documento3 pagineTomb of Archimedes (Sources)Petro VourisNessuna valutazione finora
- Cash Flow July 2021Documento25 pagineCash Flow July 2021pratima jadhavNessuna valutazione finora
- Modern Construction HandbookDocumento498 pagineModern Construction HandbookRui Sousa100% (3)
- Ce-Series - TK60981-ML-18 IM - Rev - 0 - 05-13Documento96 pagineCe-Series - TK60981-ML-18 IM - Rev - 0 - 05-13VERDADE MUNDIAL GUERRANessuna valutazione finora
- Hitachi Vehicle CardDocumento44 pagineHitachi Vehicle CardKieran RyanNessuna valutazione finora
- Construction Project - Life Cycle PhasesDocumento4 pagineConstruction Project - Life Cycle Phasesaymanmomani2111Nessuna valutazione finora
- Categorical SyllogismDocumento3 pagineCategorical SyllogismYan Lean DollisonNessuna valutazione finora
- Hyundai SL760Documento203 pagineHyundai SL760Anonymous yjK3peI7100% (3)
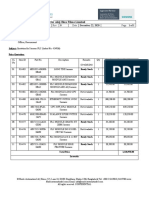
- LC For Akij Biax Films Limited: CO2012102 0 December 22, 2020Documento2 pagineLC For Akij Biax Films Limited: CO2012102 0 December 22, 2020Mahadi Hassan ShemulNessuna valutazione finora
- IJRHAL - Exploring The Journey of Steel Authority of India (SAIL) As A Maharatna CompanyDocumento12 pagineIJRHAL - Exploring The Journey of Steel Authority of India (SAIL) As A Maharatna CompanyImpact JournalsNessuna valutazione finora
- 2.0. Design, Protection and Sizing of Low Voltage Electrical Installations (Wiring) To IEE Wiring Regulations BS 7671 MS IEC (IEC) 60364 - 16&17.12.15Documento2 pagine2.0. Design, Protection and Sizing of Low Voltage Electrical Installations (Wiring) To IEE Wiring Regulations BS 7671 MS IEC (IEC) 60364 - 16&17.12.15Edison LimNessuna valutazione finora
- Waves and Ocean Structures Journal of Marine Science and EngineeringDocumento292 pagineWaves and Ocean Structures Journal of Marine Science and Engineeringheinz billNessuna valutazione finora
- 147 Amity Avenue Nampa, ID 81937 (999) 999-9999 William at Email - ComDocumento4 pagine147 Amity Avenue Nampa, ID 81937 (999) 999-9999 William at Email - ComjeyesbelmenNessuna valutazione finora
- Sony x300 ManualDocumento8 pagineSony x300 ManualMarcosCanforaNessuna valutazione finora