Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Eb204 1Documento337 pagineEb204 1alikaroutNessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Marriot StandarsDocumento409 pagineMarriot StandarsJose Buitrago100% (10)
- 05.40.00 Cold-Formed Metal Framing Specification Updated June 2015Documento26 pagine05.40.00 Cold-Formed Metal Framing Specification Updated June 2015mishikhanNessuna valutazione finora
- HVAC JointsDocumento2 pagineHVAC JointsEmre DalgicNessuna valutazione finora
- 6 Page BROCHURE HCC PDFDocumento9 pagine6 Page BROCHURE HCC PDFManu MohanNessuna valutazione finora
- TempoDocumento4 pagineTempoAbdul Majid ShabbirNessuna valutazione finora
- Enclosure Accessories Catalog SectionDocumento52 pagineEnclosure Accessories Catalog SectionKhaled RabeaNessuna valutazione finora
- Unit 3 Thermal PhysicsDocumento1 paginaUnit 3 Thermal PhysicsGajendraNessuna valutazione finora
- InTech-Convective Heat Transfer Analysis of Solar Chimney Power Plant CollectorsDocumento14 pagineInTech-Convective Heat Transfer Analysis of Solar Chimney Power Plant CollectorszangolaNessuna valutazione finora
- Manly Plastic IncDocumento22 pagineManly Plastic IncLeah Balucan LalimNessuna valutazione finora
- History and Applications of Reinforced Brick MasonryDocumento7 pagineHistory and Applications of Reinforced Brick MasonryAbhishek AggarwalNessuna valutazione finora
- Applied Thermo - 1st ClassDocumento10 pagineApplied Thermo - 1st ClassNur Hanim Abd GhaniNessuna valutazione finora
- Consolidating Concrete with VibratorsDocumento13 pagineConsolidating Concrete with VibratorsShubham JainNessuna valutazione finora
- 2 in - #150 - FBV - WCB - SS316 - GadDocumento1 pagina2 in - #150 - FBV - WCB - SS316 - Gadrashid kNessuna valutazione finora
- AVIONICSDocumento6 pagineAVIONICSShyam Sundar ThakurNessuna valutazione finora
- SHELTER FOR COMPOSITE CLIMATES 3rd SEMDocumento19 pagineSHELTER FOR COMPOSITE CLIMATES 3rd SEMflower lilyNessuna valutazione finora
- Smart MaterialDocumento12 pagineSmart MaterialPower RiderNessuna valutazione finora
- Design of Underground TankDocumento20 pagineDesign of Underground TankhiteshNessuna valutazione finora
- Rha GGBS 27 4Documento12 pagineRha GGBS 27 4KhaDeja MawraNessuna valutazione finora
- FRAME A (250X300) FRAME E (250X300) : Civil GurujiDocumento1 paginaFRAME A (250X300) FRAME E (250X300) : Civil Gurujifirojji panchtilakNessuna valutazione finora
- SKARDUDocumento7 pagineSKARDUTayiba GhazalNessuna valutazione finora
- Penggunaan Campuran Plastik Dan Kaca Kitar SemulaDocumento13 paginePenggunaan Campuran Plastik Dan Kaca Kitar SemulaChe Nurul Suhaida Che HassanNessuna valutazione finora
- Defects Nonstoichiometry Ionic Conductivity Solid StateDocumento61 pagineDefects Nonstoichiometry Ionic Conductivity Solid StateAgarwal Rachit100% (2)
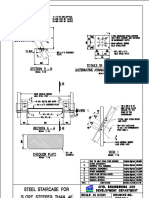
- STEEL STAIRCASE SLOPE DETAILSDocumento1 paginaSTEEL STAIRCASE SLOPE DETAILSExile PeachNessuna valutazione finora
- Dixon Sanitary Fittings CompleteDocumento252 pagineDixon Sanitary Fittings CompleteLufti Nurhartanto SmansapatiNessuna valutazione finora
- SS Seehra Black Cotton Soil Areas FinalDocumento28 pagineSS Seehra Black Cotton Soil Areas FinalmanaliamitNessuna valutazione finora
- Eth 7000024824 SNGH Hospital BQQDocumento79 pagineEth 7000024824 SNGH Hospital BQQchaudharyerravishankerNessuna valutazione finora
- SB Sway Brace AttachmentDocumento2 pagineSB Sway Brace Attachmentrvalentino2012Nessuna valutazione finora
- Duratomic TP Brochure GT15-214 PDFDocumento24 pagineDuratomic TP Brochure GT15-214 PDFDeysi CardenasNessuna valutazione finora
- ASTM A 709M-2006 - Standard Specification For Structural Steel For BridgesDocumento8 pagineASTM A 709M-2006 - Standard Specification For Structural Steel For BridgesKhemaraj PathmalingamNessuna valutazione finora