Potrebbero piacerti anche
- Manual de Acceso Office365 2020Documento6 pagineManual de Acceso Office365 2020Fabricio LopezNessuna valutazione finora
- Tarea 2 de EDDocumento3 pagineTarea 2 de EDFabricio LopezNessuna valutazione finora
- Método de La Tasa Interna de RetornoDocumento2 pagineMétodo de La Tasa Interna de RetornoFabricio LopezNessuna valutazione finora
- Guia Unidad3 2019Documento19 pagineGuia Unidad3 2019Fabricio Lopez0% (2)
- Práctica No 2: Análisis de Circuitos Eléctricos Escuela de Ingeniería Eléctrica Facultad de IngenieríaDocumento6 paginePráctica No 2: Análisis de Circuitos Eléctricos Escuela de Ingeniería Eléctrica Facultad de IngenieríaFabricio LopezNessuna valutazione finora
- Reporte 3 Campos y OndasDocumento16 pagineReporte 3 Campos y OndasFabricio LopezNessuna valutazione finora
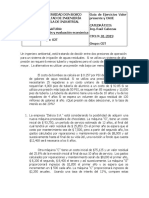
- Ejercicios TIRDocumento2 pagineEjercicios TIRFabricio Lopez0% (3)
- Ante ProyectoDocumento3 pagineAnte ProyectoFabricio LopezNessuna valutazione finora
- Guia CAUE y VPNDocumento3 pagineGuia CAUE y VPNFabricio LopezNessuna valutazione finora
- Guia de Ejercicios No. 1 Interés Simple, Compuesto, Tasa Nominal y Tasa Efectiva 03-8-15Documento5 pagineGuia de Ejercicios No. 1 Interés Simple, Compuesto, Tasa Nominal y Tasa Efectiva 03-8-15Fabricio LopezNessuna valutazione finora
- Análisis Por Valor PresenteDocumento7 pagineAnálisis Por Valor PresenteFabricio LopezNessuna valutazione finora
- Reporte PracticaDocumento16 pagineReporte PracticaFabricio LopezNessuna valutazione finora
- Discusion 2Documento3 pagineDiscusion 2Fabricio LopezNessuna valutazione finora
- Manual - Alpha II - 1 PDFDocumento47 pagineManual - Alpha II - 1 PDFNicolás Santiago UgarteNessuna valutazione finora
- Unidad 0 Introduccion A La P.O.O. 4Documento10 pagineUnidad 0 Introduccion A La P.O.O. 4VIOLINISTA DE COMARAPANessuna valutazione finora
- Unidad 1Documento4 pagineUnidad 1Andreina CevallosNessuna valutazione finora
- Creación y Edición de Capas en AutocadDocumento4 pagineCreación y Edición de Capas en Autocadcramirezrojas@yahoo.comNessuna valutazione finora
- Suite Home 3d Guia de UsuarioDocumento16 pagineSuite Home 3d Guia de UsuarioAntonio RealNessuna valutazione finora
- Avance2 PDFDocumento5 pagineAvance2 PDFLuis VilchezNessuna valutazione finora
- Actividad 1 Patronaje Industrial Femenino PDFDocumento7 pagineActividad 1 Patronaje Industrial Femenino PDFGabriela Maria Acosta HenaoNessuna valutazione finora
- CSS PDFDocumento116 pagineCSS PDFCasimiro PeñaNessuna valutazione finora
- Deber de Informática 2do QuimestresDocumento11 pagineDeber de Informática 2do Quimestressallomari30Nessuna valutazione finora
- La Iguana VerdeDocumento2 pagineLa Iguana VerdeMSoraya MelaniaNessuna valutazione finora
- Modulo 7Documento4 pagineModulo 7Estefani De La CruzNessuna valutazione finora
- BackTrack 5 Tutorial 6Documento5 pagineBackTrack 5 Tutorial 6Andres ValenciaNessuna valutazione finora
- Fundamentos de html2Documento19 pagineFundamentos de html2DonaldRamonRizoNessuna valutazione finora
- Guia para Presentar InformesDocumento2 pagineGuia para Presentar Informesedwin estiven calderon ortizNessuna valutazione finora
- Tarea 3 de Control Clasico Aplicacion de Ecuaciones Diferenciales A CircuitosDocumento2 pagineTarea 3 de Control Clasico Aplicacion de Ecuaciones Diferenciales A CircuitosKevinSanchezNessuna valutazione finora
- Biblioteca para Manejo Del PWM Con MikroCDocumento6 pagineBiblioteca para Manejo Del PWM Con MikroCRicardo HernándezNessuna valutazione finora
- Evaluación Heuristica v2018 OKDocumento44 pagineEvaluación Heuristica v2018 OKJudith Membrives LlorensNessuna valutazione finora
- Traba Yureidy UniminutoDocumento4 pagineTraba Yureidy UniminutoJuan Manuel Horta CardozoNessuna valutazione finora
- Evidencia 4 Trazabilidad Pollos PLQDocumento3 pagineEvidencia 4 Trazabilidad Pollos PLQJennifer ZamoraNessuna valutazione finora
- Ejercicio de Programacion Entera - Branch & BoundDocumento3 pagineEjercicio de Programacion Entera - Branch & BoundCarlos Arturo ObregónNessuna valutazione finora
- Relacion y Diferencias Entre La Contabilidad Adm y La Cont FinancieraDocumento2 pagineRelacion y Diferencias Entre La Contabilidad Adm y La Cont FinancieraMonica Jaramillo Rojas100% (1)
- Tarjetas CRCDocumento4 pagineTarjetas CRCCamilo AlfonsoNessuna valutazione finora
- Especificaciones Tecnicas de CaminosDocumento25 pagineEspecificaciones Tecnicas de CaminosSantosHuamanTrejoNessuna valutazione finora
- Taller Algebra 8 Periodo 2Documento26 pagineTaller Algebra 8 Periodo 2Jose Luis Pantoja100% (1)
- 3 - Manual de Usuario Final PSDocumento90 pagine3 - Manual de Usuario Final PSAntonio De Jesús Martínez100% (1)
- Guia 1 Entorno de Trabajo de ExcelDocumento22 pagineGuia 1 Entorno de Trabajo de ExcelEdwin KämmererNessuna valutazione finora
- Cuestionario Toma de DecisionesDocumento35 pagineCuestionario Toma de DecisionesMelissa Vásquez Trujillo100% (1)
- Examen Parcial GatoDocumento18 pagineExamen Parcial GatoJavier Torres PomaNessuna valutazione finora
- Prototipo de Sistema Experto para El Mantenimiento Y La Reparación de HardwareDocumento12 paginePrototipo de Sistema Experto para El Mantenimiento Y La Reparación de HardwareAlexander Rivera VelasquezNessuna valutazione finora
- Print Fil 516Documento48 paginePrint Fil 516Pootz JavaNessuna valutazione finora