Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Chapter 22 Auto Flight
Caricato da
Judhi C ArdyantoCopyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
Chapter 22 Auto Flight
Caricato da
Judhi C ArdyantoCopyright:
Formati disponibili
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
AGUSTA AW139
AVIONIC SYSTEMS
TRAINING MANUAL
B.1.3
CHAPTER 22
AUTOPILOT & FLIGHT DIRECTOR
CONTENTS
SUB-CHAPTER SUBJECT
22-10 AUTOPILOT & FLIGHT
DIRECTOR SYSTEMS
For Training Purposes Only
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
AUTOMATIC FLIGHT CONTROL SYSTEM (AFCS)
SYSTEM DESCRIPTION
The automatic flight control system consists of two independent Auto Pilot channels marked as AP1
and AP2. The total system consists of two independent sets of sensors; two sets of actuators, two
autopilot systems, and a single trim system to supply the cockpit crew with fail–passive/fail–safe,
automated control of the aircraft about the pitch, roll, and yaw axes in the 3-axis configuration and
collective, pitch, roll, and yaw in the 4-axis configuration. The AFCS furnishes the helicopter with the
following capabilities:
- Preflight test
- Hands–on stability augmentation system (SAS)
- Hands-off pitch and roll attitude hold (ATT)
- Collective control (Four-axis autopilot only)
- Yaw control
- Autotrim
- System and sensors monitoring.
The AFCS is an active–active system because both autopilots channels under normal conditions are
operational at the same time. It is also a fail–safe system designed to be easily overridden by the pilot
so safe recovery can be made and the helicopter can be flown manually if an autopilot malfunction
takes place. The pilot can immediately override the AFCS at any time by manually operating the
flight controls. The system gives full control authority to the pilot regardless of whether the autopilot
is engaged or disengaged.
NOTE: With the autopilot engaged a number of options are available so the pilot can manually
override the AFCS such as detent switches, force trim release (FTR) switches, autopilot
disengage switches, and actuator circuit breakers.
AFCS COMPONENTS
The primary components of AFCS are the two independent autopilot systems, each supported by a
separate modular avionics unit (MAU); two independent attitude and heading reference systems
(AHRS); two independent air data sources (ADS) and the electronic standby instrument system with
it’s back up attitude indicator.
Depending on configuration, the AFCS can also use information from either one or two radar altimeter
sensors for collective radar height (RHT) hold mode (four-axis only).
For Training Purposes Only 1
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
The complete AFCS consists of the following components:
- Two AFCS Actuator Input/Output Processor (AI/OP) Modules within each MAU
- Autopilot controller
- Guidance controller
- Smart linear actuators
- Trim actuators (supplied by Agusta)
- Air data modules
- Attitude heading reference systems
- Electronic standby instrument system (for third attitude source)
- Radar altimeter (either 1 or 2 systems can be installed)
- Cockpit switches and indicators.
Three configurations of the AFCS are available. They are briefly described below.
1- Basic VFR 3–Axis System – This system equips the helicopter with dual pitch, roll, yaw and trim
control. No FD is included. (ATT Hold and SAS function only)
2- 3–Axis IFR System With 2–Cue FD – In addition to the basic autopilot function described above,
this system equips the helicopter with a coupled pitch and roll flight director for automated flight
control and navigation.
3- 4–Axis System With 3–Cue FD – This is the full standard 4–axis AFCS with a 3–cue flight director
and automatic collective control.
AFCS CONTROLS
The AFCS controls the aircraft with linear actuators. Each tri–axial set of actuators (pitch, roll, and
yaw) connects electrically to its own autopilot system with each autopilot system supplying half the
total control authority. Control commands are generated by the system then transmitted to the flight
control system actuators where they are carried out, thus controlling the flight of the helicopter.
Autotrim commands are generated independently by each autopilot. However, the trim actuator units
operate only on commands issued by the priority autopilot. A single rotary parallel actuator in each
control axis supports the autopilot autotrim function.
2 For Training Purposes Only
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
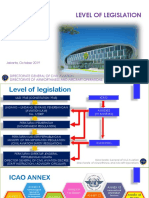
LINEAR ACTUATOR
(ROLL)
CYCLIC
RODS
LINEAR ACTUATOR
(PITCH)
PITCH AND ROLL AFCS LINEAR ACTUATORS
YAW ROD
LINEAR ACTUATOR (YAW)
PITCH AND ROLL AFCS LINEAR ACTUATORS
For Training Purposes Only 3
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
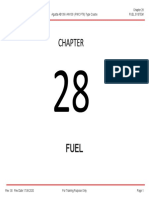
TRIM ACTUATOR
(ROLL)
TRIM ACTUATOR
TRIM ACTUATOR (PITCH)
(YAW)
TRIM ACTUATORS LOCATION
4 For Training Purposes Only
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
AFCS INPUT /OUTPUT SOURCES (1 of 2)
For Training Purposes Only 5
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
AFCS INPUT / OUTPUT SOURCES (2 of 2)
6 For Training Purposes Only
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
The pilot uses the following components to control the AFCS:
- Autopilot controller
- Guidance controller
- Cyclic, pedal, and collective beep switches
- Cyclic, pedal, and collective FTR switches
- Display controller
- Remote instrument controller (RIC)
- Cyclic, pedal, and collective trim enable switches
- Remote go–around button
- Cursor control device (CCD) and display units
- Remote standby
- AP disconnect switch
- Master caution reset.
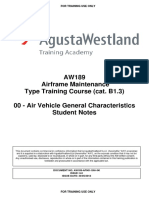
AUTOPILOT CONTROLLER
A single autopilot control panel, shown in Figure 8–1, is located on the center pedestal of the cockpit.
It is used to select autopilot modes, turn modes on and off, and test the AFCS. The controller consists
of 6 buttons with integral annunciators outlined below. A green annunciator light associated with
each button.
AUTOPILOT CONTROL PANEL
AP1 (Autopilot No. 1 Select Button) – Pushing the AP1 button turns the annunciator
light on and engages the #1 autopilot. Pushing the button again turns the annunciator
off and disengages the #1 autopilot.
AP2 (Autopilot No. 2 Select Button) – Pushing the AP2 button turns the annunciator
light on and engages the #2 autopilot. Pushing the button again turns the annunciator
off and disengages the #2 autopilot.
For Training Purposes Only 7
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
TEST (Built–In Test Button) – Pushing TEST lights the green annunciator light and
starts the built–in test (BIT).
CPL (Decouple Button) – Pushing CPL button decouples the flight director from the
autopilot. Pushing the CPL button again couples the flight director with the autopilot.
When the annunciator light is lit, the flight director is coupled. The annunciator light is
extinguished when the flight director is uncoupled.
NOTE: The default condition for the flight director to be coupled when the AP’s are switched on.
SAS (Stability Augmentation System Button) – Pushing the SAS button lights the
annunciator and engages the SAS. Pushing the button again turns the annunciator off
and disengages the SAS.
NOTE: When the cyclic trim switch is off, the autopilot engages with the SAS mode active.
ATT (Attitude Mode Select Button) – Pushing the ATT button turns the annunciator
light on and engages the Attitude mode. Pushing the button again turns the
annunciator off and disengages ATT mode.
NOTE: When the cyclic trim switch is on, the autopilot engages with the ATT mode active. This is
the normal operating or default condition.
GUIDANCE CONTROLLER
The guidance controller, shown in the next figure, is used to control most AFCS flight director (FD)
functions and PFD coupling. The controller is installed in the center column of the cockpit center
console. With it, pilots select which FD is primary and control the different AFCS FD functions.
NOTE
The selection buttons
within a red frame are only
active when the aircraft is
equipped with a 4-axis
autopilot configuration
GUIDANCE CONTROLLER
8 For Training Purposes Only
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
The mode select buttons on the guidance controller engage and disengage FD modes. A green
annunciator light on each button along with associated annunciations on the PFD, alert the pilot as to
which FD mode is engaged (armed or captured). The buttons are also back–lit for visibility in low
ambient light conditions. The pilot determines which PFD is supplying primary data by the couple
arrow at the top of the PFD ( ). The pilot controls the direction the arrow points with the PFD
button in the upper right corner of the guidance controller. If the couple arrow is pointing left, the FD
is engaged to PFD1 and is the primary PFD data source. If the selected FD is unreliable, the green
couple arrow on the PFD is replaced by a amber arrow ( ). When both FD are failed the green
arrow will be replaced with an FD FAIL annunciator.
In the figure below, the couple arrow ( ) is centered between the ROL and PIT annunciators at the
top of the PFD for ease of view.
PFD COUPLE ARROW
TYPICAL PFD TOP DISPLAY – 4 AXIS AUTOPILOT -
The guidance controller controls the go–around (GA) capability of helicopters equipped with a FD.
The pilot initiates an automated go–around by pushing the GA button on the collective control head.
The function of each button on the Guidance Controller is described below.
STBY (Standby Button) – Pushing the STBY button lights the green annunciator
light and cancels any selected active FD modes. If the autopilot is engaged, it remains
engaged in basic pitch and roll hold.
Pushing the STBY button again, turns off the annunciator, cancels STBY, and activates the selected
modes. Each cyclic pitch control is equipped with a remote STBY button. Pushing the STBY button
on the cyclic control grip initiates the same functions as the STBY switch.
PFD (Primary Flight Display Button) – Pushing the PFD button selects which PFD
(left or right) supplies source data to be used by both FD.
The selected PFD is identified on the control head itself by green left/right arrow annunciators
( ) located on each side of the PFD button.
HDG (Heading Select Button) – Pushing the HDG button lights the green
annunciator and commands the AFCS HDG Select mode to steer the aircraft to acquire,
capture, and hold the selected magnetic heading displayed on the PFD compass card.
For Training Purposes Only 9
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
The HDG Select mode is engaged by setting the heading bug on the HSI to the desired heading and
pushing the HDG button. Airspeed must be 60 kts or greater for HDG Select mode to engage.
Pushing the HDG button again disengages HDG Select mode and extinguishes the annunciator. To
synchronize the heading bug to the present aircraft heading, the SYN button on the Remote Instrument
Controller must be pressed.
IAS (Indicated Airspeed Hold Mode) – Pushing the IAS button lights the green
annunciator and commands the IAS mode to generate pitch commands that maintain a
selected aircraft speed.
The IAS mode is engaged by flying the aircraft to the desired airspeed and pushing the IAS button.
For IAS mode to engage, airspeed must be between 60 KIAS and Vne (3-axis FD), 60 KIAS and Vne
less 5 KIAS (4-axis FD). Pushing the IAS button again disengages the IAS mode and the annunciator
turns off.
VS (Vertical Speed Mode Button) – Pushing the VS button lights the green
annunciator and commands the VS mode to capture and hold a constant vertical speed
referenced on the selected PFD.
Airspeed must be 60 kts or greater to engage VS mode. Pushing the VS button again disengages VS
mode and the annunciator turns off. The operating range is –1000 ft/min to +2000 ft/min (3-axis FD)
–1500 ft/min and 2000 ft/min (4-axis FD).
ALT button lights the green annunciator and commands the ALT Hold mode to capture
and maintain a desired altitude. The ALT mode is engaged by establishing the desired
altitude and pushing the ALT button.
For ALT mode to engage, airspeed must be 60 KIAS to Vne (3-axis FD) / 0 KIAS to Vne (4-axis FD).
If the ALT mode is engaged during a climb or descent, the aircraft levels off at the barometric altitude
present at the moment that the ALT button is pushed. Pushing the ALT button again disengages ALT
Hold mode and the annunciator turns off.
RHT (Radar Altitude Hold Mode Button) (4-axis FD only)– Pushing the RHT
button lights the green annunciator and commands the RHT mode to capture and
maintain a selected radar altitude.
A reference bug on the radar altimeter tape and a digital readout above the radar
altimeter tape are presented. The reference height can be changed by depressing
the collective FTR switch flying to the required height and releasing the FTR
switch or by using the collective beep trim switch (aft to increase). An audio tone
is produced when the height reference is changed. The collective PI limiting
function is enabled when RHT mode is coupled.
10 For Training Purposes Only
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
CAUTION
In RHT mode the voice message “Altitude Altitude” is triggered when height exceeds the refererence
by a value proportional to the reference height.
Minimum absolute altitude for engaging RHT mode is 15 ft AGL. The RHT mode can be engaged at
any absolute altitude between 15 ft and 2000 ft AGL. The RHT mode can remain engaged up to an
absolute altitude of 2500 ft AGL. However, if the aircraft descends below 10 ft AGL, the RHT mode
disengages automatically. Pushing the RHT button again disengages RHT mode and the annunciator
turns off.
NAV (Navigation Mode Button) – Pushing the NAV button lights the green
annunciator and arms the NAV mode to capture and track the horizontal navigation
source displayed on the selected PFD (VOR, LOC, or LNAV).
Airspeed must be 60 KIAS or greater for NAV mode to arm and engage. Pushing the NAV button
again disengages NAV mode and the annunciator turns off.
APP (Approach Mode Button) – Pushing the APP button lights the green
annunciator and arms the APP mode to capture and track the lateral deviation signal of
a tuned and identified VOR or LOC, or both the lateral and vertical navigation signals
of an ILS or MLS.
VOR/ILS Approach FD functions. The VOR non-precision approach or ILS approach functions are
selected depending on the NAV receiver tuning when the APP mode button is pushed. Pressing the
APP pushbutton, HDG is engaged (green caption) and the present aircraft heading held, VOR/LOC-
GS is armed (white caption). At VOR/LOC capture HDG will automatically disengage and the
helicopter turns to track the selected radial, VAPP/LOC caption will display on the PFD. For ILS
approach when intercepting the glideslope signal the GS mode is automatically captured and the
previous collective mode disengages.
NOTE
To avoid false localizer captures, APP mode should be armed when the helicopter is flying inbound to
the ILS radial.
FMS approach function (VGP – 4-axis autopilot only). This mode
produces a non precision approach similar to an ILS approach when using a
non localizer based approach from the data base. The glide path is anchored
at the BOD with an angle equal to that specified in the data base at the
corresponding waypoint. The VGP mode is armed (white caption) by
pushing the APP button. Intercepting the projected glideslope the VGP
mode is automatically captured.
In either case within the glideslope bug there will be a letter: I for ILS, P for VGP or V for VPATH.
The P letter and bug, when VGP is armed, appears on the left hand side of vertical deviation scale.
When captured the symbol moves to the right hand side of the vertical deviation scale.
For Training Purposes Only 11
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
Signal capture and tracking is determined by the VOR or LOC that is displayed on the AFCS coupled
PFD. Pushing the APP button again disengages APP mode and the annunciator turns off.
DCL (Deceleration Mode Button – 4-axis FD only) – Pushing the DCL button lights
the green annunciator, arms the DCL mode, and engages the IAS mode (only active in
four axis configuration).
With DCL mode armed, at a point after glideslope intercept on a precision approach, the FD captures
the proper pitch attitude and makes the proper power corrections to achieve 80 kts indicated airspeed
at or before reaching 200 ft radar altitude in zero wind conditions. When the DCL pushbutton is
pushed the LOC, GS and DCL modes are armed and the IAS and HDG modes are engaged. After GS
capture and at a computed condition for correct approach and deceleration the IAS mode is
disengaged and the DCL mode engaged. The airspeed reference bug moves to 80 KIAS and the
digital reference is set to 80 KIAS. These values can be adjusted using the cyclic beep trim at which
time the IAS mode automatically engages replacing the DCL mode.
Pushing the DCL button again disengages DCL mode and the annunciator turns off.
ALTA (Altitude Acquire Mode Button – 4-axis FD only) – Pushing the ALTA button
lights the green annunciator and commands the AFCS to establish a preset +1000 fpm or
-750 fpm rate of climb or descent as required, and to fly the aircraft to the altitude preset
in the altitude select window of the selected PFD.
Pushing the ALTA button also captures the airspeed existing at the time the mode is engaged and
maintains it in the climb or descent.
The vertical speed reference can be changed by either using the collective beep trim (aft to increase)
or with the collective FTR button depressed, moving to the required vertical speed and releasing.
When the preset altitude is achieved the mode will transition to ALT mode and the IAS mode will
remain engaged. The collective PI limiting function is enabled when ALTA mode is coupled. When
collective PI limiting is active the airspeed is reduced to maintain vertical speed reference.
Upon arrival at the preset altitude, ALTA mode captures the preset altitude. When the preset altitude
is successfully captured, the FD automatically transfers to ALT Hold mode. Pushing the ALTA
button again disengages ALTA mode and extinguishes the annunciator.
HOV (Hover/Velocity Hold Mode Button – 4-axis FD only) – Pushing the HOV
button or the cyclic beep trim switch center position (5th postion) lights the green
annunciator and commands the AHRS to maintain longitudinal and lateral aircraft
velocities for hovering or low speed flying. The Hover mode can be engaged with
groundspeed of 80Kts or less.
At engagement of this mode the helicopter groundspeed magenta reference circel is set to zero and the
RHT is automatically engaged if a valid radar altimeter signal is available and within the threshold
limits. RHT mode can be subsequently disengaged independently and replaced by ALT if required.
A hover symbol with the ground velocity vector bug is also displayed on the HSI. When the mode is
engaged, the velocity vector reference can be changed by pressing the cyclic FTR switch, flying to the
desired lateral and longitudinal speed and releasing, or by using the cyclic beep trim to move the bug
12 For Training Purposes Only
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
to the desired velocities. If the cyclic beep trim switch is pressed in the centre position (5th position)
the longitudinal and lateral velocity references are set to zero.
CAUTION
In ALT mode the voice message “Altitude Altitude” is triggered when altitude exceeds the refererence
altitude by ±150ft. Therefore, if ALT mode is engaged as an alternative to RHT, at a height below
300ft, set DH at a value 10 ft below the reference height in order to have an additional height
deviation exceedance cue.
CAUTION
The HOV mode maintains a groundspeed reference therefore pilot must ensure that crosswind and
rearwind speed limits are not exceeded (see Section 1 of the RFM or Company OMB). If wind limits
are exceeded directional control may not be maintained.
CAUTION
When HOV mode is engaged above 2000ft AGL the ALT mode does not automatically engage.
Therefore the pilot must control collective manually or engage ALT mode. The hover symbol
automatically appears on the PFD when HOV mode is engaged. The display shows the aircraft
velocity vector and the reference velocity symbol.
Pushing the HOV button again disengages HOV Hold mode and the annunciator turns off.
BC (Back Course Mode Button) – Pushing the BC button lights the green
annunciator and commands reverse lateral deviation sensing to the CDI.
This enables the CDI to capture and track the localizer inbound on the back course with the course
pointer set to the front course of the localizer. Pushing the BC button again disengages BC mode and
the annunciator turns off.
For Training Purposes Only 13
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
FLIGHT DIRECTOR FUNCTIONS AVAILABILITY
4-Axis 3-Axis
Button Description
Configuration Configuration
STBY Standby (clear all FD modes) Yes Yes
PFD PFD selection Yes Yes
HDG Heading selection Yes Yes
IAS Indicated airspeed hold Yes Yes
VS Vertical speed hold Yes Yes
ALT Altitude hold Yes Yes
RHT Radar altitude hold Yes No
NAV Lateral navigation Yes Yes
APP Vertical or lateral approach Yes Yes
DCL Instrument landing system (ILS) decelerate Yes No
ALTA Altitude acquire Yes No
HOV Hover/Velocity hold Yes No
BC Back course approach Yes Yes
4-AXIS AUTOPILOT/FLIGHT DIRECTOR FUNCTIONS AND CAPTIONS
PFD Caption PFD Caption
Arm Capture
Mode Function Control Axis white) green
HDG Heading select Roll and Yaw n/a HDG
ALT Altitude hold Collective n/a ALT
IAS Indicated Airspeed Hold Pitch n/a IAS
LNAV/
NAV Lateral Navigation Roll n/a VOR/
LOC
Roll for VOR or VAPP VAPP
APP Lateral Approach
LOC LOC LOC
Collective for
GS GS
Vertical Approach Glide Slope or
VGP VGP
VGP
Preselect VOR-ILS approach
PRV n/a As for APP n/a
while in LNAV
ILS Deceleration
DCL Pitch/Collective DCL DCL
VGP Deceleration
14 For Training Purposes Only
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
PFD Caption PFD Caption
Arm Capture
Mode Function Control Axis white) green
BC Back Course Approach Roll BC BC
ALTA Altitude Acquire Collective n/a ALTA
VS Vertical Speed Hold Collective n/a VS
GA Go-Around Pitch/Collective n/a GA
VGP Vertical Glide Path Collective VGP VGP
RHT Radar Height Hold Collective n/a RHT
HOV Hover/Velocity Hold Pitch/Roll n/a HOV
OS* Over Station mode Roll n/a OS
ALVL* Auto Level mode Pitch/Collective n/a ALVL
SBY Clear all FD modes n/a n/a n/a
* Provided automaticaly
For Training Purposes Only 15
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
CYCLIC CONTROL HEAD
The AFCS furnishes a cyclic FTR switch located on the cyclic grip, shown in the figure below. When
the FTR switch is pushed and held, pitch and roll or cyclic trim are temporarily suspended (i.e., for as
long as the switch is held in).
CYCLIC STICK HEAD
The beep switch is a 4–way switch with respect to a center (neutral) position. When the aircraft is
configured with a 4-axis autopilot the switch has a fifth (press) position. Movement of the cyclic beep
switch in the forward and aft direction generates a change in the aircraft pitch attitude reference at
2°/sec while airspeed is less than 120 knots. A 1°/sec rate is used while airspeed is greater than 140
knots. Between 120 and 140 knots the beep rate varies linearly between 2° and 1°/sec. Moving the
switch in the left–right direction changes the aircraft roll attitude reference at a 3°/sec rate.
Pressing the 4-way switch down in the center position will activate the HOV mode of the 4-axis
autopilot when the right condition exists.
Pushing and holding the cyclic FTR switch does the following:
- Suspends cyclic trim
- Lets the pilot manually reposition the cyclic unhindered by control feedback and trim the aircraft to
a new pitch and roll attitude
- Suspends force feel
- Disengages trim control.
Releasing the cyclic FTR switch does the following:
- Re–engages cyclic trim to maintain the flight controls at the newly trimmed flight attitude
- Restores force feel
- Restores trim control.
16 For Training Purposes Only
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
Perform the following steps to change the attitude or heading of the aircraft using the FTR switch.
1- Push and hold the desired FTR switch to temporarily suspend trim function.
2- Maneuver the aircraft to the desired attitude or heading.
3- Release the FTR switch to restore the trim function.
CYCLIC BEEP SWITCH
The cyclic beep switch or cyclic is a 4–way thumb switch mounted in the cyclic control head that the
pilot uses to select a new trimmed position by changing the pitch and roll attitude of the helicopter.
On helicopter equipped with the 4-axis Flight Director the cyclic beep switch can be pushed to
activate the HOV mode (fifth position) when the correct condition exists. The cyclic can be trimmed
fore and aft, left and right, by pushing the thumb switch in the desired direction. Using the cyclic
button to trim the cyclic forward or aft of the neutral position changes the pitch attitude at a rate of
2.5º per second. Trimming the cyclic left or right of the neutral position changes the roll attitude at a
rate of 3º per second. When the aircraft is configured with a 4-axis autopilot the switch has a fifth
(press) position. Pressing the 4-way switch down in the center position will activate the HOV mode
of the 4-axis autopilot when the right condition exists.
YAW FTR SWITCHES
Yaw FTR switches are located on the control pedals of the yaw control system. These switches are
used to temporarily suspend yaw trim.
Pressing and holding the yaw FTR switches does the following:
- Temporarily suspends yaw trim
- Synchronizes the yaw heading reference, if active.
Releasing the yaw FTR switches does the following:
- Restores yaw trim
- Captures and maintains the newly established heading.
For Training Purposes Only 17
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
COLLECTIVE CONTROL
Only in the 4-axis FD configuration, the collective control is engaged whenever the CLTV/YAW
master trim switch on the Miscellaneous Panel is placed to on and a FD function controlled by the
collective channel (ALT, VS, GS, ALTA) is selected. In the 3-axis FD configuration the collective
has no control over any of the Flight Director Functions.
COLLECTIVE CONTROL HEAD
Selecting the collective/yaw switch off disables the collective actuator clutch and force feel
mechanism. This switch is used to disable the collective trim actuator for long periods during flight.
The collective force trim release (FTR) trigger switch is used to temporarily disengage collective
operation. Force feel is also disabled as long as the FTR button is triggered.
Collective control is disengaged by either of the following:
- Disengaging both autopilots.
- Disengaging any active, collective controlled FD mode.
Selecting one of the vertical modes controlled by the FD establishes a climb or descent parameter for
the collective control function to maintain. Refer to the specific FD mode for details on vertical
reference change methods and limitations. When engaged, the collective control function monitors
the following parameters to limit collective pitch changes to prevent exceeding engine Power Index
(PI) limitations.
- Engine Torque
- Interturbine Temperature (ITT) PI = Power Index
- Compressor speed (NG)
- Power Turbine speed (NF).
18 For Training Purposes Only
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
COLLECTIVE CONTROL FAILURE CONDITIONS AND ANNUNCIATIONS
When a collective control failure occurs, the function is automatically shut down and de–coupled from
the FD. The following initiate collective control function failures:
- Invalid collective position sensor
- Failed collective actuator.
A CAS message alerts the pilot that the collective control function is lost.
OTHER COMPONENTS (SWITCHES, RELAYS, AND ANNUNCIATORS)
The AFCS requires switches, relays, and annunciators for pilot inputs to the system and for aircraft
control. The AB139 AFCS installation includes the following peripheral components:
- Momentary 4–way coll/yaw beep switch (4–axis AFCS configuration only)
- Momentary 2–way yaw beep switch (3–axis AFCS configuration only)
- Momentary 4–way cyclic beep switch (5-way in 4-axis AFCS configuration)
- Momentary cyclic force trim release button
- Momentary collective force trim release button
- Momentary yaw force trim release pedal switch
- 2–state cyclic trim enable switch
- 2–state collective/yaw trim enable switch
- Momentary remote GA mode button
- Momentary remote SBY button
- Momentary AP quick disconnect switch.
For Training Purposes Only 19
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
LINEAR AFCS ACTUATOR
The AFCS uses the linear series actuators to operate with high bandwidth closed loop control of the
aircraft around the pitch, roll, and yaw axes. Six linear actuators are installed on the AB139 aircraft,
which makes it a dual actuator system. Each tri-axial set (pitch, roll, and yaw) of actuators interfaces
electrically to a single AP system. The linear actuators contain:
- Digital Bus Command Interface
- Microprocessor for Internal Closed Loop Control
- Brushless Motor
- Ballscrew
- Hall Effect Position Sensors
- DC Engage Brake
- High Integrity Centering Circuit
- Independent LVDT Position Sensor.
The linear actuators are energized directly from the aircraft power bus. Each liner actuator closes a
servo loop with a position command from the MAU. The brushless motor and ballscrew supply low
friction and backlash for precision control. The high integrity centering (move to center) function is
included to control the added failure modes of fully digital systems. The AFCS receives LVDT inputs
for pitch, roll, and yaw servo positions, and pitch and roll cyclic grip positions.
LINEAR AFCS ACTUATOR
20 For Training Purposes Only
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
CONTROL INPUT / OUTPUT (CIO) MODULE
The CIO module supplies an interface for external Input / Output data on the ASCB-D. The CIO
module is a part of the MAU system. For more data on the CIO module, refer to the Modular
Avionics Unit (MAU) System.
CUSTOM INPUT / OUTPUT (CSI/O) MODULE
The Custom Input / Output module translates external Input Output data to and from the ASCB-D.
The CSIO module is a part of the MAU system. For more data on the CSIO module, refer to the
Modular Avionics Unit (MAU) System.
ACTUATOR INPUT / OUTPUT PROCESSOR (AIOP) MODULE
The AIOP modules are installed in the MAU’s of the AB139 aircraft. Each MAU contains two
hardware-identical AI/OP modules marked as AI/OP-A and AI/OP-B. The AIOP module provides the
AFCS functions. The module has interfaces for the linear actuators, trim actuators, and position
sensors. Each AIOP module interfaces with three linear actuators and three or four Trim actuators.
The Input / Output part of the AIOP module contains the following Input / Output types:
- CAN Bus Transmitter and Receiver (control and operation of Linear Actuators)
- ARINC 429 Bus Receiver, (AHRS and Standby ADI inputs)
- 3 V AC, 2048 Hz Reference Output for External Excitation of Position Sensors
- AC Demodulation Inputs for Position Sensors and Related Excitation
- DC Analog Inputs
- Ground/Open Discrete Inputs
- 28 V dc/Open Discrete Inputs
- Ground/Open Quick Disconnect Discrete Input
- Low-Current 28 Volt/Open Output Discretes
- Low-Current Ground/Open Output Discretes
- High-Current 28 Volt/Open Output Discretes
- Pulse Width Modulation (PWM) Ground/Open Outputs (control of Trim Actuators).
The heartbeat monitor makes sure that the timing of the processor and its software are correct. If an
out of tolerance condition is sensed, the heartbeat monitor disarms all external discrete outputs. The
power monitor function monitors the voltage level on each of the voltage inputs to make sure the level
is correct. If a voltage is out of tolerance, the AIOP disarms all external discrete and serial data bus
outputs of the AIO card.
The AI/OP receives AHRS and standby electronic instrument data through the ARINC 429 digital
data bus. The ac demod analog inputs receive differential ac signals from the aircraft and actuator
mounted sensors. Each AIOP module supplies its own ac sensor reference excitation for the linear
variable differential transducer (LVDT) and resolvers.
For Training Purposes Only 21
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
The pitch, roll, and yaw linear actuators receive commands through the CAN digital serial bus. The
AIOP receives the actuator status through the CAN bus. There are two CAN bus interfaces on each
AIOP module. The primary CAN bus interface can transmit and receive and the secondary interface
can receive only. The quick disconnect input is a ground/open input with a hardware mechanism.
This input disarms a discrete output related to the condition of the discrete input.
The Pulse Width Modulation outputs operate adjustable speed DC motors within the Trim Actuators
with PWM between a ground and open condition. The two wire ground/open connection changes
polarity for bi-directional control. The high side connection is changed between open and high
impedance to change the adjustable speed control.
With the AFCS, a minimum of two AIOP modules (per MAU) are necessary for engaged operation.
The two AIOPs supply two independent routing for command and monitor functions. Both AIOPs
must operate correctly for the AFCS to be engaged. The hardware of both AIOPs is the same, but
there are differences in the software and the I/O.
AIR DATA SYSTEM (ADS) COMPONENTS
The ADS uses two Air Data Modules (ADM) installed in the aircraft nose compartment. The ADMs
transmit static and total pressure data through an ARINC 429 interface to the MAU. Outside air
temperature (OAT) data is transmitted to the MAUs from an external OAT sensor. The AFCS uses air
data for mode control like Airspeed hold (IAS), Altitude hold (ALT) and Vertical speed hold (VS).
The air data parameters that follow are inputs to the AFCS:
- Indicated Airspeed
- True Airspeed
- Barometric-Corrected Altitude
- Pressure Altitude
- Vertical Speed.
For more data on the ADS, refer to the Air Data System (ADS).
22 For Training Purposes Only
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
AHRS COMPONENTS
The AHRS installed on the AB139 aircraft includes two independent systems. The AHRS interfaces
to the AFCS through the ARINC 429 bus. The AFCS uses AHRS data for inner loop control and
outer loop prediction. The AHRS parameters that follow are inputs to the AFCS:
- Pitch Angle
- Roll Angle
- Magnetic Heading
- Pitch Rate
- Roll Rate
- Yaw Rate
- Longitudinal Acceleration
- Lateral Acceleration
- Normal Acceleration.
RADIO ALTIMETER (RAD ALT) SYSTEM COMPONENTS
The RAD ALT system interface to the MAUs through an analog interface. The RAD ALT parameters
that follow are inputs to the AFCS:
- Radar Altitude Signal
- Radar Altitude Valid Signal.
The AFCS uses the radar altitude data for:
- Outer Loop Gain Scheduling
- Collective RHT Hold Mode.
- Autolevel Function.
For more data on the RAD ALT system, refer to the AA-300 Radio Altimeter (RAD ALT) System.
TRIM ACTUATOR
The AFCS does slower control movements with the Trim actuators. TheTrim actuators are installed in
parallel with the pilot controls. The actuators have the same control travel command as the pilot, but
have a low-limit rate of control for malfunction safety. The Trim actuator commands can be
overridden by pilot commands through a slip-clutch or spring-clutch.
Three Trim actuators are necessary for an AFCS installation on three-axis aircraft. One actuator is for
each aircraft axis of control (pitch, roll, and yaw). For four-axis aircraft, four Trim actuators are
necessary. A collective Trim actuator is added to the basic three-axis configuration.
For Training Purposes Only 23
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
For cyclic and pedal control trim, the Trim actuators are controlled to keep average output shaft
position of the linear actuators at the center (trim) position. This is done for sufficient linear actuator
command for the support of aircraft control commands.
For collective control, the Trim actuator is controlled with a position servo loop that is in the MAU
flight guidance software. Position feedback is supplied to the MAU by a collective position sensor
that is integrated within the Trim actuator.
Each Trim actuator includes an artificial feel mechanism. The artificial feel mechanism is for the pilot
flight controls to simulate a control force feedback from a stick position moved to the center position
(trim). The pilot can make a selection to cause this force feel system to operate or not operate. The
pilot can make this selection with one or more trim switches that remove or engage a clutch in the trim
assembly. When the clutch is disengaged, the force-feel system is disengaged and the Trim actuator
drive is disengaged.
The AFCS receives rotary variable differential transducer (RVDT) inputs for pitch and roll cyclic grip
positions, pedal position, and collective position.
ELECTRONIC STANDBY ADI INSTRUMENT SYSTEM COMPONENTS
The electronic standby ADI instrument system is a third source for aircraft pitch and roll attitude and
rate data input to the AP system. Aircraft pitch and roll attitude and rate data is calculated with an
internal, three-axis sensor cluster. The data is transmitted to the MAUs through an ARINC 429
interface. The MAUs use the attitude and rate data from the electronic standby instrument system to
find which AHRS has a failure. The MAUs use this data if an unflagged miscompare occurs between
the two AHRS.
24 For Training Purposes Only
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
AFCS FUNCTIONS
AUTOPILOT (AP)
The AFCS incorporates two independent autopilots designated AP1 and AP2. The individual
autopilots process information from numerous independent data sources to generate aircraft control
commands for their own triaxial set of linear actuators. Primary among these data sources are the
following:
- Two AHRS
- Two ADS
- The Standby Attitude Directional Indicator.
- Two Radio Altimeters
In normal operation, each autopilot supplies half the total linear actuator system authority. When only
one autopilot is engaged, the single system operates at full gain. However, the full gain operation of a
single engaged autopilot supplies only half the system authority that exists when both APs are
operating. When both APs are engaged, each single system gain is reduced to 50% so each system
supplies half of the required input. This results in full gain control with twice the single system
authority.
The preflight test verifies autopilot control and monitors are working properly. It is engaged when the
pilot pushes the TEST button on the AP controller. CAS messages and synoptic messages are
displayed to show the results of the test to the pilot. Preflight test is inhibited in the air.
ENGAGING AND DISENGAGING THE AUTOPILOTS
The autopilots are engaged and disengaged by pushing the AP1 and/or AP2 buttons on the autopilot
controller. ATT is the default mode when the autopilots are engaged. However, the autopilots are
forced to SAS mode if the cyclic trim enable switch is off.
NOTE: The pilot has the same control authority over the aircraft whether the autopilot is engaged in
SAS or ATT modes and when the autopilot is disengaged.
Engaging the AP also activates the automated yaw control function. The autopilots function with or
without FD guidance. In normal operation, both autopilots are engaged to supply full dual system
performance while coupled to the FD. To prevent flight control hardovers when engaging or
disengaging the the APs, the easy–on/easy–off function of the system centers the control actuators
where they are locked in position by electric brakes.
For Training Purposes Only 25
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
AUTOPILOT OVERRIDE
The pilot has full authority with the AP engaged or disengaged and can immediately override the
AFCS at any time by simply taking over the controls. With the autopilots engaged, FTR switches, AP
disengage switches, and actuator circuit breakers offer the pilot different ways to partially or
completely override the AFCS.
FORCE TRIM RELEASE (FTR) BUTTONS
FTR buttons are switches positioned on the cyclic control grip and the collective control grip that the
pilot can use to immediately disengage the cyclic and collective force trim and force feel systems.
The yaw FTR switches are positioned on the anti–torque pedals and are controlled with the balls of the
pilot’s feet. The pilot can use these switches to temporarily suspend yaw trim.
CYCLIC FTR
Pushing and holding the cyclic FTR button suspends pitch and roll trimming so the pilot can manually
reposition the cyclic trimming the aircraft to a new pitch and/or roll attitude unhindered by control
feedback. Releasing the cyclic FTR button re–engages cyclic trim to maintain the flight controls at
the newly trimmed flight attitude and restores force feel.
COLLECTIVE FTR
Pushing and holding the collective FTR button suspends collective trimming so the pilot can manually
reposition the collective pitch control. Releasing the collective FTR button re–engages collective trim
maintaining the newly trimmed collective position and restores force feel.
YAW FTR
Pushing and holding the yaw FTR switches on the anti–torque pedals suspends yaw trimming so the
pilot can manually change the yaw heading reference, if active. Releasing the yaw FTR switches re–
engages yaw trim maintaining the newly established heading and restores force feel.
AUTOPILOT DISENGAGE SWITCHES
The primary means to disengage the autopilot is to push the AP1 and AP2 buttons on the autopilot
controller. The secondary means of disengaging the autopilots is the quick disconnect button mounted
on the pilot and copilot cyclic grip. Pushing the quick disconnect button simultaneously disconnects
both autopilots of the dual autopilot system.
26 For Training Purposes Only
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
AP FAILURE
If unreliable attitude and yaw data is sensed, the affected AP automatically disengages.
CAUTIONS
1- Use the quick disconnect button only during an event that requires both autopilots be
disengaged simultaneously and only if the pilot is not able to use the AP1 and AP2 buttons to
disengage.
2- Pushing the quick disconnect button immediately resets the AFCS to it’s current position and
disengages force trim requiring the pilot to manually control the aircraft.
3. There is a circuit breaker for each triaxial set of linear actuators and a trim actuator circuit
breaker for each AFCS. Pulling these breakers immediately disables the actuators and
inhibits control inputs from the AFCS to the aircraft control system. It is intended primarily
as a maintenance tool.
4. A CAS message advises the pilot when the SAS Capability is degraded.
AUTOPILOT MODES OF OPERATION
The AFCS operates in one of two basic modes:
- Attitude (ATT) retention mode
- Stability augmentation system (SAS) mode.
The operation of each mode is described below.
NOTES:
1- Activating the SAS mode and activating the ATT mode are mutually exclusive events. Selecting
one mode deactivates the other.
2- Yaw control is active when either ATT or SAS mode is engaged.
ATTITUDE (ATT) MODE
The ATT mode provides long–term stabilization for hands–off flying and FD coupling by retaining
the helicopter pitch and roll attitudes. The system does this by noting the pitch and roll attitude at the
time the ATT is engaged and maintaining it. When coupled to the FD, ATT retains the attitude
reference commands supplied by the FD. If only one axis (pitch or roll) is coupled to the FD, the
remaining axis performs the normal uncoupled ATT hold mode. In high speed cruise flight, ATT can
be used to maintain roll attitudes or aircraft heading. Changes to the pitch and roll attitude are made
using the cyclic FTR button or the cyclic beep switch. The cyclic FTR button is used for large
changes in helicopter attitude. The cyclic beep switch is used for small changes in helicopter attitudes.
When engaged, ATT is operational throughout the flight envelope.
For Training Purposes Only 27
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
ATT MODE ENGAGEMENT AND DISENGAGEMENT
Pushing the ATT button on the autopilot controller is the primary means of engaging and disengaging
ATT mode. When the cyclic trim switch is on position, the autopilot defaults to the ATT mode when
one or both autopilots are engaged. If the SAS is engaged and cyclic trim is on, the ATT mode is
engaged by pushing the ATT button on the autopilot control panel.
The ATT mode automatically disengages by any one of the following:
- Engaging the SAS mode
- Setting the cyclic trim switch to off
- Disengaging both autopilots.
HIGH SPEED ROLL ATTITUDE AND HEADING HOLD
Changes to the high speed roll heading hold reference are performed by temporarily using the cyclic
FTR switch or the roll beep switch to reposition the aircraft. The high speed roll attitude and heading
hold modes are submodes of the ATT mode that operate when the autopilot is not coupled to the FD.
The high speed roll attitude hold function is active at airspeeds above Effective Translational Lift
(ETL) or 40 to 45 kts. When active, it holds the aircraft at any established bank angle of 6º or greater.
Otherwise, it holds the aircraft heading.
NOTE: ATT mode flight limitations are stated in the Rotorcraft Flight Manual.
CAUTION
In the event heading data becomes unreliable, the roll/heading hold function becomes
unavailable and the ATT mode reverts to holding the roll Attitude.
STABILITY AUGMENTATION SYSTEM (SAS)
The SAS improves handling characteristics of the helicopter by damping the effect of external aircraft
disturbances such as wind, turbulence and poor pilot control technique. The SAS enhances
controllability during low speed maneuvering and hovering flight. When engaged, the SAS operates
throughout the entire flight envelope. Since the SAS mode is hands–on control, the AFCS can be
operated with force trim on or off and pitch/roll autotrim is disabled.
NOTE: The SAS flight limitations are noted in the Rotorcraft Flight Manual.
28 For Training Purposes Only
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
SAS ENGAGEMENT AND DISENGAGEMENT
If the ATT mode is engaged, the SAS can be engaged by either of the following actions:
- Pushing the SAS button on the autopilot controller
- Turning the cyclic trim off.
NOTE: The SAS functions with force trim on or off.
The SAS mode automatically disengages when ATT mode is engaged or when both autopilots are
disengaged.
NOTES:
1- With the SAS engaged, the pitch/roll autotrim is disabled.
2- The SAS is the default system with the cyclic trim off and one or both autopilots are engaged.
3- With the SAS engaged, the cyclic beep switch is inoperative.
YAW CONTROL
The yaw control function of the autopilot furnishes the necessary yaw coordination to maintain proper
high speed and low speed directional control. It is operational throughout the flight envelope and
operates independently of both the SAS and ATT mode. In both high and low speed flight, the aircraft
responds to collective pitch changes with lateral movement about the yaw axis. The collective–to–
yaw crossfeed function responds to these changes by countering torque effect generated with
collective pitch changes. The autopilot yaw control function is consists of the following sub-functions:
- Yaw rate damping
- High speed turn coordination
- Low speed heading hold
- Collective–to–yaw crossfeed
- Lateral ball trim.
YAW CONTROL ENGAGEMENT AND DISENGAGEMENT
The yaw control function engages automatically when either autopilot is engaged and ATT or SAS
mode is active. Dual yaw control becomes active when both autopilots are engaged. Yaw control
disengages automatically when both autopilot systems are disengaged.
For Training Purposes Only 29
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
YAW RATE DAMPING
The yaw rate damping is active whenever the yaw control function is engaged. Yaw rate damping
improves stability about the yaw axis at all airspeeds and automatically suppresses dutch roll
tendency.
HIGH SPEED TURN COORDINATION
High speed turn coordination manages movement about the yaw axis during roll controlled heading
turns to minimize slip or skid. The turn coordination functions whenever yaw control is engaged in
other than a low speed yaw heading subfunction.
LOW SPEED YAW HEADING HOLD
Low speed heading hold is provided from an autopilot generated (non–FD) heading error term. The
function is active when airspeed is less than 40 to 45 knots or the HOV mode is engaged, the yaw
control function is active, the roll axis is not coupled to a FD mode (except for HOV mode), and yaw
trim is enabled. A low speed heading hold reference is established when the low speed yaw heading
hold function becomes active. While operating below 40 to 45 Kts or in HOV mode, changes to the
heading reference can be achieved by the following:
- Repositioning the aircraft nose by applying anti–torque pedal pressure against the force feel system
- Using the yaw FTR (pedal) switch
- Using the yaw beep switch.
NOTE: Additional flight limitations are addressed in the Rotorcraft Flight Manual.
LATERAL BALL TRIM
The lateral ball trim function is active when the yaw control function is engaged, yaw trim is enabled
and airspeed is above Effective Transitional Lift (ETL). Through this function, the pilot can use the
yaw beep switch to position the trim ball to maintain or remove a constant slip or skid or to purposely
displace the aircraft tail left or right of the horizontal flight path. The system also generates a yaw
response to counter the torque effect of collective changes. The yaw control function is operational
throughout the flight envelope.
CAUTIONS
1- Unreliable heading information supplied by the primary HSI makes the yaw heading hold
function inoperative and reverts the low speed yaw control function to yaw rate damping.
2- A yaw trim failure renders the heading hold function and the lateral ball trim function
inoperative.
30 For Training Purposes Only
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
COLLECTIVE CONTROL (Four-Axis AFCS Only)
The collective control function furnishes automated vertical control of the helicopter. Collective
control is operational throughout the flight envelope as long as collective trim is enabled and a
collective FD mode is selected.
The engine Torque, engine ITT, and/or engine Compressor speed parameters by means of the Power
Index (PI) are monitored by the autopilot collective control function and used to prevent engine or
Transmission over–torque. This limiting function is only active when the automatic collective control
function is engaged. In helicopters with FDs installed, it provides collective position commands for
3–cue operation or for Collective–Only mode operation (such as Radar Altitude Hold mode).
COLLECTIVE CONTROL ENGAGEMENT AND DISENGAGEMENT
The autopilot collective control function is activated by selecting 3–cue FD operation, or by activating
a Collective–Only mode while the collective/yaw force trim is turned on. When the collective/yaw
force trim is turned off, the collective actuator clutch and force feel mechanism are disengaged. The
FTR button is used to disengage the collective actuator and pushing the FTR button disables force
feel.
Collective control is also disengaged by reverting to the 2–cue FD operation, deselecting the
Collective–Only mode, or by disengaging both autopilot systems. If a collective control failure is
detected, the collective control function is inhibited and decoupled from the FD. The following inhibit
collective control function and activate a CAS message to alert the pilot.
- Unreliable collective position sensor
- Failed collective actuator.
NOTE:
The collective/yaw force trim switch is typically used to disable the collective actuator for a long
duration during the flight. Use the collective FTR button to temporarily disengage collective
operation.
AUTOMATIC TRIM (AUTOTRIM)
AUTOTRIM maintains roll, pitch, and yaw linear actuators at the center–of–travel position to ensure
full actuator authority in response to aircraft control commands. However, in the SAS mode, the
pitch/roll AUTOTRIM function is disabled.
CAUTION
When SAS mode is active, the Pitch/Roll Autotrim function is disabled.
For Training Purposes Only 31
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
AUTOTRIM CONTROL ENGAGEMENT AND DISENGAGEMENT
The pitch and roll AUTOTRIMs are active when the following criteria are met:
- Either one or both autopilot systems are engaged in ATT mode (Not SAS)
- The cyclic force trim switch is on.
The yaw AUTOTRIM is active when the following criteria are met:
- Either or both autopilot systems are engaged in SAS or ATT
- Collective/Yaw trim switch is on.
The trim switches are used to disable trim in flight for long durations. When trim is turned off, the
trim clutches and force feel mechanisms are disengaged. If cyclic force trim is turned off, the SAS is
activated and the pilot must fly the helicopter by hand. Pushing the cyclic FTR and/or the yaw force
trim release switch temporarily disengages the respective force enabling the pilot to manually re–trim
the helicopter. Pushing the FTRs also disengages force feel. Force trim is also temporarily disabled
by activating the detent switches in the trim actuator assemblies. The detent switches are located in
the force feel actuator assembly and inform the AFCS when the pilot temporarily takes control of the
aircraft. The AFCS disables respective trim commands when a detent switch is activated.
NOTE:
Detent switches can only be detected if the force feel system is engaged.
AUTOTRIM PRIORITY
One Trim Actuator is installed for each axis of autopilot control (roll, pitch, yaw and collective). Trim
master is automatically switched to the channel, which has the most functional linear actuators. In
single autopilot operation, the engaged autopilot controls the trim actuator units and is designated as
the trim master. When the second autopilot is engaged, the autopilot that was engaged first retains
trim master authority. The pilot can use this priority scheme to control which autopilot is the trim
master.
If AUTOTRIM fails, a CAS message informs the pilot on which side the failure occurred. The pilot
can attempt to restore AUTOTRIM by disengaging and re–engaging the autopilot that was the trim
master at the time of failure. Turning the failed autopilot off transfers autopilot priority to the other
autopilot channel. This trim master switching logic is overridden if one or more linear actuators fails
and trim master authority automatically switches to the channel with the most functional linear
actuators.
AUTOTRIM CONTROL FAILURE
If AUTOTRIM fails, both autopilots remain in ATT mode and a CAS message alerts the pilot. In this
case, the pilot can choose to activate the SAS and hand fly the helicopter or manual trim the helicopter
as necessary to keep the trim actuators from saturating. A display of the linear actuator position is
available on the MFD to assist the pilot in manually trimming the helicopter.
32 For Training Purposes Only
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
AFCS MONITOR DESCRIPTION
The AFCS self–monitors the following to detect actuator malfunctions and mitigate the effects of
component failures.
- AFCS data
- Pitch linear actuator
- Roll linear actuator
- Yaw linear actuator
- Attitude and rate comparison
- Trim runaway
- Trim inoperative.
PREFLIGHT TEST
The preflight test verifies autopilot control and monitor activation reducing the possibility of latent
failures in critical system components. As part of the test sequence, the AFCS moves the linear and
trim actuators, driving them in opposite directions to limit the movement of the flight controls during
the test. CAS messages and synoptic messages display the results of the test to the pilot.
PREFLIGHT TEST ENGAGEMENT AND DISENGAGEMENT
Pushing the TEST button on the autopilot controller engages the preflight test as long as the following
conditions exist:
- The helicopter is on the ground.
- Less than 12.5% of collective pitch is introduced.
- Neither AP is engaged.
- Electrical power is applied to the AFCS.
- All trim switches are turned on.
- Hands/feet are off of the cyclic and yaw controls (no FTR or detent switch activity).
- Hydraulics are on and pressurized by either internal power or an external hydraulic cart
NOTE: The Electrical Pump can not be used to test the AutoPilot.
- The SAS release is not pushed.
For Training Purposes Only 33
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
The preflight test disengages under the following conditions.
- The helicopter becomes airborne.
- Either AP1 or AP2 button is pushed.
- The TEST button on the AP controller is pushed.
- Any trim switch that is on is turned off.
- The pitch, roll or yaw, out of detent switch transitions from false to true.
- Yaw or cyclic FTR transitions from false to true.
- Collective pitch exceeds 12.5%.
- Hydraulic pressure transitions out of normal operating range.
- Power is removed from the linear actuator brake.
- Trim power is removed.
- SAS release switch transitions from false to true during actuator tests.
ATTITUDE AND HEADING REFERENCE SYSTEM (AHRS) AND AIR DATA SENSOR
(ADS) SOURCE SELECTION AND SENSOR VOTING
The autopilot and FD use both AHRS and ADS data. The data can be either on–side data, data from
the selected PFD, or voted data and is used as follows:
During normal duel system operations:
AP1 uses AHRS1 data.
AP2 uses AHRS2 data.
If the AHRS being used by one AP fails, the other AP side lessens the effect of the failure by
independent AHRS usage. Flagged on–side AHRS failures that disable the autopilot are pitch angle,
roll angle, pitch rate, roll rate, or yaw rate. The AFCS automatically determines which AP should
remain engaged in the event a miscompare is identified between AHRS1 and AHRS2. Autopilot
computations use voted ADS data. Voted data is the average of both primary ADS sensors as long as
both sensors are reliable. If one of the ADS sensors is determined to be unreliable, the remaining
primary ADS sensor data is considered by the system to be voted data and is used as such. If both
ADS primary sensors are unreliable or if both are reliable but their outputs disagree, then the voted
ADS data is set to default airspeeds for both indicated airspeed and true airspeed so the autopilot
remains engaged.
34 For Training Purposes Only
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
The FD uses voted AHRS data for various FD control calculations. In this case, voted data is
considered to be the average of both AHRS primary sensors as long as both are reliable. If one of the
AHRS is determined to be unreliable, the remaining AHRS data is considered by the system to be
voted data and used as such. If both AHRS are unreliable, then the voted data is unreliable. If both
AHRS are reliable but their outputs disagree, then the voted data is considered unreliable and the FD
is rendered unreliable.
Flagged AHRS failures that disable the FD are pitch angle, roll angle, pitch rate, roll rate, yaw rate,
lateral acceleration, longitudinal acceleration or normal acceleration. The FD also uses both selected
and voted ADS data with selected ADS data being posted on the selected PFD. The selected PFD is
determined by the PFD couple arrow controlled by the PFD button on the guidance controller.
Selected ADS data is also the primary source for most vertical flight director modes. If for example,
the PFD couple arrow is pointing right and the IAS mode is engaged, then the ADS data displayed on
PFD2 is the airspeed data used in the FD IAS controls. If the selected ADS is unreliable and the pilot
selects IAS, ALT, VS, ALTA or ASEL as a FD mode, the selected mode is inhibited. FD function is
flagged as unreliable when voted ADS data becomes unreliable.
NOTE:
Because the FD uses selected PFD ADS data, an IAS or VS reference bug may not exactly match the
current airspeed or vertical speed on the non–selected PFD side, even when the FD commands are
satisfied.
FLIGHT DIRECTOR
The AFCS, dual FDs give commands for automated control of the helicopter along a desired flight
path. The coupled autopilots use the priority FD commands to drive their actuators thereby exercising
control. The coupled function is defaulted to ON when switching the Autopilots on. Pushing the
CPL button on the Autopilot Controller decouples the FD mode from the autopilot. Pushing it again
couples the FD mode.
NOTE:
When the FD uncoupled or in SAS mode, the pilot can manually fly the FD command bars. In either
case, the command bars are displayed on each PFD by the priority FD. The 3–cue operation of the FD
refers to a combination of FD modes that include collective control.
NOTE:
In a 4–axis AFCS, if an airspeed–based mode such as IAS or DCL is combined with a second vertical
mode such as ALT, ALTA, VS or GS, then the second vertical mode is a 3–cue mode.
For Training Purposes Only 35
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
COMMAND BARS
Pitch and roll command bars are displayed on the PFD by the AFCS only when a FD mode is active.
If there is no FD mode active there are no pitch and roll command bars.
Whenever in a 4-axis FD configuration a collective mode is engaged (ALT, VS, ALTA, GS, VGP,
GA, ALVL, RHT) a collective position cue appears on the PFD beside the ADI.
2–CUE AND 3–CUE OPERATION
2–cue operation refers to a combination of FD modes that does not include collective control.
NOTE:
When referring to a 3–axis AFCS, all vertical modes are described as 2–cue vertical modes.
3–cue operation refers to a combination of FD modes that includes collective control. In a 4–axis
AFCS, combining an airspeed–based mode such as IAS or DCL with a second vertical mode such as
ALT, ALTA, VS, GS results in the second vertical mode being a 3–cue mode.
COLLECTIVE PI LIMITING FUNCTION (Four-Axis AFCS Only)
During collective coupled operation the collective movement is limited by the following PI values:
- Maximum 97% AEO (95% at altitudes above 10000ft Hp),
- Maximum 106% AEO for airspeed less than 60 KIAS (5 MIN message displayed beside
collective cue)
- Maximum 140% OEI
- Minimum 5% AEO
- Minimum 10% OEI
When PI limiting function is active and is limiting maximum collective movement, an amber LIM
caption is displayed beside the collective cue.
If PI limiting is active with IAS engaged and the required reference for VS, ALTA, RHT, GA, or ALT
cannot be achieved the airspeed will automatically reduce as necessary to achieve the collective mode
reference. If the collective mode reference cannot be maintained, when the airspeed has reached a
minimum of 80 KIAS this airspeed will be maintained and the collective mode reference will be
reduced. While the mode reference values cannot be maintained or achieved that mode caption is
displayed in amber on the PFD.
36 For Training Purposes Only
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
CAUTION
If PI limiting is active with ALT/RHT engaged and the reference height cannot be maintained
the aural warning “Altitude Altitude” will warn the pilot when the maximum allowed deviation from
the reference height has been exceeded. When flying at high altitude (above 15000ft) select the Load
Share switch to TORQUE (MISC panel) to improve the helicopter maneuverability during automatic
turns.
COLLECTIVE CUE DISPLAY
* In the UCPL operation when collective cue is below reference arrows collective must be
raised and vice-versa
For Training Purposes Only 37
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
MODES
The following descriptions assume the modes are coupled, unless stated otherwise.
HDG
Heading Hold Mode. This mode steers the aircraft to the heading reference bug displayed on the
PFD. The heading bug can be adjusted using the HEADING knob on the Remote Instrument
Controller and can be synchronized with the actual heading by pressing the HEADING knob (PUSH
SYNC). Only in the 4-axis FD configuration, the heading reference bug can be synchronized to the
actual heading by pressing the cyclic FTR button or modified using the cyclic beep trim switch left or
right. In HDG mode turns are performed at standard rate 1 (3 deg/sec). HDG mode can be used
within an airspeed range of 60 KIAS to Vne in the both configurations. HDG mode will disengage
when airspeed drops below 55 KIAS.
ALT
Barometric Altitude Hold Mode. This mode maintains the barometric altitude existing at the time of
engagement. The altitude reference is displayed as a set bug on the PFD altitude tape. In the 3-axis
configuration the altitude bug can be set to the present altitude by pressing the cyclic FTR. The ALT
hold mode is operational within an airspeed range of 60 KIAS to Vne, and in the 4-axis configuration
between of 0 KIAS and Vne.
4-axis only
If the ALT SEL knob in the 4-axis configuration has not been previously moved (ie. no ALTA
activation) the ALT reference will also be displayed as a magenta digital readout. The altitude
reference can be adjusted using the collective beep trim (aft to increase altitude) or by pressing FTR
button, flying to desired altitude, and releasing. An audio tone is produced when the altitude reference
is changed. The collective PI limiting function is enabled when ALT mode is coupled.
CAUTION
In ALT mode the voice message “Altitude Altitude” is triggered when altitude exceeds the reference
altitude by ±150ft.
Note
ALT mode can be engaged with HOV mode (as an alternative to the RHT mode).
IAS
Airspeed Hold Mode. This mode maintains the airspeed existing at the time of engagement. When
engaged the airspeed reference is displayed as a set bug and a digital readout on the PFD. The
airspeed reference bug is adjusted by either using the cyclic beep fore/aft or repositioning the cyclic,
with the FTR button depressed, to the required airspeed and releasing FTR button. The airspeed
reference is adjustable via the cyclic beep switch between 60 KIAS and Vne in the 3-axis
configuration and between 60KIAS and Vne less 5 KIAS in the 4-axis configuration. In the 4-axis
configuration, if airspeed, at time of engagement, is higher than Vne less 5 KIAS then it is
automatically reduced to Vne less 5 KIAS. This mode will disengage when airspeed drops below 55
KIAS
38 For Training Purposes Only
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
ALTA (4-axis FD only)
Altitude Acquire Mode. This mode, when engaged with a barometric altitude pre-select reference set
(through ALT SEL knob), will automatically engage the IAS mode and the aircraft is flown towards
the preset altitude. The final altitude reference is displayed as a cyan bug and digital readout above
the altitude scale. The vertical speed reference is displayed as a bug and digital readout on the PFD.
The preset vertical speeds are +1000fpm or -750fpm in the direction of the preset altitude. The
vertical speed reference can be changed by either using the collective beep trim (aft to increase) or
with collective FTR button depressed, moving to the required vertical speed and releasing. When the
preset altitude is achieved the mode will transition to ALT mode and the IAS mode will remain
engaged. The collective PI limiting function is enabled when ALTA mode is coupled. When
collective PI limiting is active the airspeed is reduced to maintain vertical speed reference. ALTA
mode can be used in an airspeed range between 60 KIAS and Vne. The mode will disengage when the
airspeed drops below 55 KIAS
NAV
VOR/LOC/LNAV FD functions. These functions are selected with the NAV pushbutton depending
on navigation source selection on the PFD and NAV receiver tuning. Pressing the NAV pushbutton,
HDG is engaged (green caption) and the present aircraft heading held, VOR/LOC/LNAV is armed
(white caption). At VOR/LOC/ LNAV capture HDG will automatically disengage and the helicopter
turns to track the selected radial or leg. The NAV mode can be used in an airspeed range between 60
KIAS and Vne. The mode will disengage when the airspeed drops below 55 KIAS.
APP
VOR/ILS Approach FD functions. The VOR non-precision approach or ILS approach functions are
selected depending on the NAV receiver tuning when the APP mode button is pushed. Pressing the
APP pushbutton, HDG is engaged (green caption) and the present aircraft heading held, VOR/LOC-
GS is armed (white caption). At VOR/LOC capture, HDG will automatically disengage, a chime is
heard and the helicopter turns to track the selected radial, VAPP/LOC caption will display on the PFD.
Whenever APP pushbutton is pressed, with LNAV FD function engaged and PREV function active on
driving PFD, VAPP or LOC-GS will arm. Intercepting VOR or LOC, VAPP or LOC-GS will engage.
In the 4-axis FD configuration, during an ILS approach when intercepting the glideslope signal the GS
mode is automatically captured and the previous collective mode disengages.
Note
To avoid false localizer captures, APP mode should be armed when the helicopter is flying inbound to
the ILS radial.
In the 3-axis FD configuration the FD bars and mode annunciations may disappear in the non-selected
PFD when localizer mode transits from Arm to Capture
For Training Purposes Only 39
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
FMS approach function (VGP) 4-axis only. This mode produces a non precision approach similar
to an ILS approach when using a non localizer based approach from the data base. The glide path is
anchored at the BOD with an angle equal to that specified in the data base at the corresponding
waypoint. The VGP mode is armed (white caption) by pushing the APP button. Intercepting the
projected glideslope the VGP mode is automatically captured. In either case within the glideslope bug
there will be a letter: I for ILS, P for VGP or V for VPATH.
GLIDESLOPE BUG DISPLAY
The P letter and bug, when VGP is armed, appears on the left hand side of vertical deviation scale.
When captured the symbol moves to the right hand side of the vertical deviation scale.
CAUTION
During steep approach without automatic collective control be attentive not to use less than 5% PI.
PRV
The PRV mode is a way to preselect ILS or VOR approach functions while FD is still engaged in
LNAV. PRV is selected by pressing the PRV pushbutton on the Display Controller. If the APP
pushbutton is pressed the FD will arm LOC and GS or VAPP functions depending on the NAV
receiver tuning (ILS or VOR). At the capture of the LOC or VAPP functions the FD disengages
LNAV and engages LOC-GS or VAPP functions. Selected PRV course will be displayed as thin
cyan, while armed, and as normal magenta when captured.
DCL (4-axis FD only)
ILS Deceleration Mode. The deceleration mode decreases the aircraft speed from its present speed
down to approximately 80 KIAS as the aircraft reaches 200ft AGL. When the DCL pushbutton is
pushed the LOC, GS and DCL modes are armed and the IAS and HDG modes are engaged. After GS
capture and at a computed condition for correct approach and deceleration the IAS mode is
disengaged and the DCL mode engaged. The airspeed reference bug moves to 80 KIAS and the
digital reference display is set to 80 KIAS. These values can be adjusted using the cyclic beep trim at
which time the IAS mode automatically engages replacing the DCL mode. This mode is available
within an airspeed range of 60 KIAS and Vne. This mode will disengage when airspeed drops below
55 KIAS
40 For Training Purposes Only
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
BC
Back Course Approach Mode. The back course mode is selected when the BC pushbutton is
pushed. Pressing the pushbutton, HDG is engaged (green caption) and the BC is armed (white
caption). At BC capture, HDG is disengaged.
CAUTION
The course selected for a BC approach must be the ILS approach course of the front runway.
VS
Vertical Speed Hold Mode. The vertical speed existing at the time of engagement is held. Vertical
speed reference bug and digital readout are adjusted by either using the collective beep or
repositioning the collective, with the FTR button depressed, to the required vertical speed and
releasing on the desired vertical speed. In the 4-axis FD configuration the collective PI limiting
function is enabled when VS mode is coupled. The VS mode can be selected with an airspeed range
between 60KIAS and Vne when vertical speed is –1000ft/min and 2000 ft/min (3-axis FD) or –1500
ft/min to 2000 ft/min (4-axis FD). The mode will disengage when the airspeed drops below 55 KIAS.
GA
Go Around Mode. The mode may be selected from either collective and will give a 750 ft/min climb
set bug reference in the 3-axis FD configuration and a 1000 ft/min climb set bug reference on the
Vertical Speed tape in the 4-axis configuration. In the 3-axis configuration a 65% PI bug is set on the
PI indicator. In the 4-axis configuration an airspeed bug is set at the airspeed existing when the mode
is engaged or 80 KIAS, whichever is greater. Engaging the GA the FD will control airspeed and
vertical speed at the commanded values and level the wings. The GA Mode can only be exited by
selecting another vertical FD mode or selecting the STBY button on the Guidance Controller or on the
cyclic stick.
Note
This mode can be used, when the IAS is greater than 60 KIAS, to recover the aircraft from an unusual
attitude and initiate a rate of climb.
OS
Over Station Mode. When overflying a VOR station, with VOR or VAPP FD functions engaged, the
VOR equipment detects the aircraft being within the zone of ambiguity. The VOR deviation signal is
removed from the command until the VOR signal has stabilized after passing over station. While over
the station, course change may be made by selecting a new course via the Course Selector knob.
For Training Purposes Only 41
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
ALVL
Auto level Mode. If the APP (LOC/GS or VGP) mode is continued, to below landing minimum, this
safety feature is automatically activated at 150ft and an asymptotic flare to a radar height of 50ft will
be initiated. The green GS or VGP caption on the PFD will be replaced by ALVL.
CAUTION (4-axis FD only)
In VGP mode the ALVL will not activate if the missed approach point (MAP) is higher than 150ft
AGL. For this case the VGP mode will disengage at the MAP (preceded by a Vertical Track Alert
(VTA) caption displayed above the vertical guidance scale on PFD) and a chime is generated.
RHT (4-axis FD only)
Radar Height Hold Mode. This mode maintains the aircraft at the radar height at the time of
engagement when the radar altimeter indications are within the threshold limits. A reference bug on
the radar altimeter tape and a digital readout above the radar altimeter tape are presented. The
reference height can be changed by depressing the collective FTR switch flying to the required height
and releasing the FTR switch or by using the collective beep trim switch (aft to increase). An audio
tone is produced when the height reference is changed. The collective PI limiting function is enabled
when RHT mode is coupled. This Mode is available within a airspeed range of 0 KIAS to Vne.
CAUTION
In RHT mode the voice message “Altitude Altitude” is triggered when height exceeds the reference by
a value proportional to the reference height (see page 18 of this document).
RADAR HEIGHT REFERENCE BUG AND DISPLAY IN RHT MODE
42 For Training Purposes Only
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
HOV (4-axis FD only)
Hover/velocity Hold Mode. HOV mode can be engaged by pressing HOV mode on Guidance
Controller or the cyclic beep trim centre position (5th position). The HOV mode utilizes the AHRS
ground velocities to maintain hover or low speed flying. At engagement of this mode the helicopter
groundspeed reference is set to zero and the RHT is automatically engaged if a valid radar altimeter
signal is available and within the threshold limits. RHT mode can be subsequently disengaged
independently and replaced by ALT if required. A hover symbology with the ground velocity vector
bug is also displayed on the HSI.
HSI DISPLAY WHEN HOV MODE SELECTED
When the mode is engaged, the velocity vector reference can be changed by pressing the cyclic FTR
switch, flying to the desired lateral and longitudinal speed and releasing, or by using the cyclic beep
trim to move the bug to the desired velocities.
If the cyclic beep trim switch is pressed in the centre position (5th position) the longitudinal and lateral
velocity references are set to zero.
CAUTION
In ALT mode the voice message “Altitude Altitude” is triggered when altitude exceeds the reference
altitude by ±150ft. Therefore, if ALT mode is engaged as an alternative to RHT, at a height below
300ft, set DH at a value 10 ft below the reference height in order to have an additional height
deviation exceedance cue.
CAUTION
The HOV mode maintains a groundspeed reference therefore pilot must ensure that crosswind and
rearwind speed limits are not exceeded (Refer to Section 1 of the OMB). If wind limits are exceeded
directional control may not be maintained.
For Training Purposes Only 43
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
CAUTION
When HOV mode is engaged above 2000ft AGL the ALT mode does not automatically engage.
Therefore the pilot must control collective manually or engage ALT mode.
The HSI Hover Display automatically appears on the PFD when HOV mode is engaged. The display
shows the aircraft velocity vector and the reference velocity symbol.
Flight Director Flight Director Flight Director
Collective Mode Armed Vertical Armed Lateral
Engaged Mode Mode
Flight Director
Collective
Position Bar
Armed Vertical
Glide Path
Caption
TYPICAL PFD DISPLAY FOR 4-AXIS AP AIRCRAFT
44 For Training Purposes Only
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
RHT Caption on Hover Captions on
Collective Axis Pitch and Roll Axis
RHT HOV HOV
RHT
Reference
Bug
45
TYPICAL PFD DISPLAY FOR 4-AXIS AP AIRCRAFT (HVR SELECTED)
For Training Purposes Only 45
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
Groundspeed
Velocity Groundspeed Groundspeed
Indication Velocity Vector Velocity
Reference
Groundspeed
Velocity Scale
TYPICAL HSI DISPLAY IN HOVER MODE
46 For Training Purposes Only
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
AUTOMATIC FLIGHT CONTROL SYSTEM SYNOPTIC PAGE
GENERAL
The AFCS synoptic page, shown in the figure below, displays the positions of all linear actuators.
Following failure of the AFCS trim system, the pilot can use these actuator position indications to
determine when manual re-trimming is required.
AFCS SYNOPTIC PAGE ON MFD
Three scales are shown. One for each of the pitch, roll, and yaw axes. The positions of the two
actuators in each axis are shown using a triangle pointer located on either side of the scale. The AFCS
synoptic page indicates which AFCS is currently controlling the trim actuators.
For Training Purposes Only 47
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
Pitch Actuator Indicator – The pitch actuator annunciator shows the location of
the No1 and No2 pitch actuators. The two arrows ( ) on either side of the
bar, show the location of the pitch actuator in the vertical plane.
Roll Actuator Indicator – The roll actuator annunciator shows the location of
the No1 and No2 roll actuators. The two arrows ( ) on either side of the
bar, show the location of the roll actuator in the horizontal plane.
Yaw Actuator Indicator – The yaw actuator annunciator shows the location
of the No1 and No2 yaw actuators. The two arrows ( ) on either side of
the bar, show the location of the yaw actuator position.
When the aircraft is on the ground and the AFCS preflight test is activated by pushing the TEST
button on the autopilot controller, the AFCS synoptic page is automatically displayed. In a 4 DU
configuration, when the AFCS preflight TEST switch is pushed, the AFCS synoptic page is
automatically displayed on the pilot’s MFD. However, the copilot can select the AFCS synoptic page
during AFCS preflight on the copilot MFD. During AFCS preflight test, the AFCS synoptic page also
displays a text field for display of pilot prompts and test status indications used during execution of
the AFCS preflight test.
The text field displays up to 6 lines of text with 48 characters per line. The AFCS preflight status field
is only displayed while the AFCS preflight test is running. When the AFCS preflight test is complete,
the status field, (with any associated messages), is displayed for 10 seconds before it is removed.
Removing the status field does not force the MFD to return to the display it showed prior to the
running of AFCS preflight test.
NOTE:
There are some interlock failures that preclude and run the AFCS preflight test. Those failures are
annunciated in the status field for 10 seconds before the status field is removed. If the preflight is
active on an MFD, the Maintenance menu option is grayed out.
48 For Training Purposes Only
R0
AGUSTA AW139
ATA 22-10 AUTOPILOT & FLIGHT DIRECTOR
AFCS INVALID
Loss of valid actuator position information results in display of an X where the actuator position
pointer would normally be located, as shown in the figure below. Loss of valid trim master
information results in amber dashes being displayed in place of the trim master annunciation.
AFCS SYNOPTIC PAGE
For Training Purposes Only 49
R0
Potrebbero piacerti anche
- 737 Performance Reference Handbook - EASA EditionDa Everand737 Performance Reference Handbook - EASA EditionValutazione: 4.5 su 5 stelle4.5/5 (3)
- The Complete G1000 Rev 5 1 2020Documento238 pagineThe Complete G1000 Rev 5 1 2020Judhi C ArdyantoNessuna valutazione finora
- AW139 Training Notes b2Documento1.958 pagineAW139 Training Notes b2pbubs94% (34)
- B1.3 AW189 Type Training NotesDocumento2.368 pagineB1.3 AW189 Type Training Notesandrew100% (1)
- Da Fcs Pilots Manual spz7000Documento55 pagineDa Fcs Pilots Manual spz7000Shawn McCarville100% (1)
- HUMS Components and Data AcquisitionDocumento73 pagineHUMS Components and Data AcquisitionttppNessuna valutazione finora
- AW139 Flight Manual POHDocumento1.858 pagineAW139 Flight Manual POHAlp Erdem100% (9)
- EC 135 / BK117 C - 2 Training Manual Cat. ADocumento48 pagineEC 135 / BK117 C - 2 Training Manual Cat. AChirca FlorentinNessuna valutazione finora
- Operational Evaluation Report Summary - AW189 HelicopterDocumento57 pagineOperational Evaluation Report Summary - AW189 HelicopterstiveNessuna valutazione finora
- AW139 QRH VirtualDocumento292 pagineAW139 QRH VirtualAlp Erdem100% (1)
- Aspen 1000 CalibrationDocumento11 pagineAspen 1000 CalibrationJudhi C Ardyanto100% (1)
- PL-SQL Practice 10-2Documento5 paginePL-SQL Practice 10-2JOSE CARLOS MAR RANGELNessuna valutazione finora
- (ATA 00-23) PMC-3C-A0126-AF001-00 - Issue002 - (2015.03.18) Chapters 00 To 23 PDFDocumento444 pagine(ATA 00-23) PMC-3C-A0126-AF001-00 - Issue002 - (2015.03.18) Chapters 00 To 23 PDFEngenharia Aeronautica FEAU UnC100% (3)
- AW139 Type Rating CourseDocumento1.018 pagineAW139 Type Rating CourseAnonymous AO5X0qc95% (38)
- Student Manual Makila2A-2A1 Rev 0Documento367 pagineStudent Manual Makila2A-2A1 Rev 0Henrique costa mello100% (2)
- AW189 RFM - Rev 4Documento2.482 pagineAW189 RFM - Rev 4Михаил100% (3)
- Unmaintained Copy For Information Only: AW139-QRHDocumento248 pagineUnmaintained Copy For Information Only: AW139-QRHsuperdby100% (1)
- Main Rotor: Agusta Aw139 Maintenance Course Training ManualDocumento57 pagineMain Rotor: Agusta Aw139 Maintenance Course Training ManualNita PuteriNessuna valutazione finora
- AW139 Quick Reference HandbookDocumento192 pagineAW139 Quick Reference Handbookmortada101100% (2)
- AS350B3 Electrical Systems Course OverviewDocumento20 pagineAS350B3 Electrical Systems Course OverviewItgeltbayar50% (2)
- Local Host Your Word PressDocumento50 pagineLocal Host Your Word PressAbdullah FazalNessuna valutazione finora
- Helio NixDocumento61 pagineHelio Nixjai50% (2)
- Windows: Agusta A W139 Maintenance Course Training ManualDocumento9 pagineWindows: Agusta A W139 Maintenance Course Training ManualNita Puteri100% (1)
- Chapter 52 Doors AW139Documento14 pagineChapter 52 Doors AW139Nita PuteriNessuna valutazione finora
- Chapter 00 Intergarted Avionic System IntroductionDocumento37 pagineChapter 00 Intergarted Avionic System IntroductionJudhi C Ardyanto50% (2)
- 412 B1.3 Bell Training ManualDocumento276 pagine412 B1.3 Bell Training ManualJan Kneissl100% (1)
- Asnsw Aw139 Training Notes Rev3Documento169 pagineAsnsw Aw139 Training Notes Rev3Kionne Clark Medrozo100% (2)
- Pim 02277 R18Documento11 paginePim 02277 R18malsrNessuna valutazione finora
- General Installation Notes: Bell 407 Rotorcraft Installation, G500H SystemDocumento39 pagineGeneral Installation Notes: Bell 407 Rotorcraft Installation, G500H SystemJudhi C ArdyantoNessuna valutazione finora
- Level of LegislationDocumento34 pagineLevel of LegislationJudhi C Ardyanto50% (2)
- Stabilizers: Agusta A W139 Maintenance Course Training ManualDocumento6 pagineStabilizers: Agusta A W139 Maintenance Course Training ManualNita PuteriNessuna valutazione finora
- Manual For Ecureuil HelicopterDocumento63 pagineManual For Ecureuil Helicoptershahidcarlos100% (2)
- Aw139 MGB O/h Training CourseDocumento850 pagineAw139 MGB O/h Training Coursemortada10191% (11)
- TS-451 Programming EltDocumento148 pagineTS-451 Programming EltemilianoNessuna valutazione finora
- TS-451 Programming EltDocumento148 pagineTS-451 Programming EltemilianoNessuna valutazione finora
- Remote control button functions guideDocumento1 paginaRemote control button functions guideAlp Erdem100% (1)
- A109 Heli Pilot GuideDocumento54 pagineA109 Heli Pilot GuideDenise Porter100% (2)
- AW189 - Air Vehicle Time Limits - Maintenance ChecksDocumento10 pagineAW189 - Air Vehicle Time Limits - Maintenance Checksmortada101Nessuna valutazione finora
- AW139 Fuel System ChapterDocumento72 pagineAW139 Fuel System ChapterŞükrü ÇarkçiNessuna valutazione finora
- DAILY CHECK Rev 9Documento9 pagineDAILY CHECK Rev 9Samirnov IcNessuna valutazione finora
- AS350B3 Transition Pilot POIDocumento8 pagineAS350B3 Transition Pilot POIdiablohunoNessuna valutazione finora
- AW189 HELICOPTER 04 - Air Vehicle Airworthiness LimitationsDocumento10 pagineAW189 HELICOPTER 04 - Air Vehicle Airworthiness Limitationsmortada101Nessuna valutazione finora
- Le Guide Du Francha Is FamilierDocumento80 pagineLe Guide Du Francha Is Familiersimon rosendo100% (3)
- AW139 Air Cond TrainingDocumento393 pagineAW139 Air Cond Trainingbank100% (4)
- AW 189 HELICOPTER 00 - Air Vehicle General CharacteristicsDocumento46 pagineAW 189 HELICOPTER 00 - Air Vehicle General Characteristicsmortada101100% (7)
- MFD & PFD Warning - Caution Sheet Aw139Documento9 pagineMFD & PFD Warning - Caution Sheet Aw139SOHAIL HASSANNessuna valutazione finora
- AFCSDocumento84 pagineAFCSLeilson ArouchaNessuna valutazione finora
- Hums PDFDocumento106 pagineHums PDFKiriti Satyanarayana100% (1)
- EC-135 T1 (CDS) Normal ProceduresDocumento16 pagineEC-135 T1 (CDS) Normal ProceduresHighspeed Flyboy100% (1)
- 1AW139 CMP Initial Pages 31.10.2012Documento5 pagine1AW139 CMP Initial Pages 31.10.2012Fayssal BkzNessuna valutazione finora
- AB/AW139 Tail Rotor Training NotesDocumento41 pagineAB/AW139 Tail Rotor Training NotesJamesNessuna valutazione finora
- Heliwise Manual Rev - N PDFDocumento386 pagineHeliwise Manual Rev - N PDFanderson75% (4)
- AW139 Technical Information PDFDocumento81 pagineAW139 Technical Information PDFAmy Klezan71% (7)
- Agusta AB139 Helicopter Servicing ProceduresDocumento42 pagineAgusta AB139 Helicopter Servicing ProceduresŞükrü Çarkçi100% (1)
- EC135 Autopilot July 2004Documento105 pagineEC135 Autopilot July 2004Евгений Касьянов100% (3)
- Atr Lm3 AhrsDocumento31 pagineAtr Lm3 AhrsKezia SorminNessuna valutazione finora
- Audio Panel Installation Manual: 190-00325-01 June, 2010 Revision FDocumento69 pagineAudio Panel Installation Manual: 190-00325-01 June, 2010 Revision FJudhi C ArdyantoNessuna valutazione finora
- Aw139 ToolsDocumento5 pagineAw139 ToolsSohail iqbal0% (1)
- Agustawestland Aw189 Search and Rescue: Confidence in Flight. WorldwideDocumento30 pagineAgustawestland Aw189 Search and Rescue: Confidence in Flight. Worldwidethomas100% (1)
- As350b3 VemdDocumento40 pagineAs350b3 VemdRussell GouldenNessuna valutazione finora
- AW139 00 Chapter 63Documento94 pagineAW139 00 Chapter 63JamesNessuna valutazione finora
- AB/AW139 Main Rotor Blades and Rotating ControlsDocumento56 pagineAB/AW139 Main Rotor Blades and Rotating ControlsJamesNessuna valutazione finora
- AW139 Chapter 5 2016-05-13Documento136 pagineAW139 Chapter 5 2016-05-13anony8103100% (5)
- AW139Documento14 pagineAW139Amy KlezanNessuna valutazione finora
- The Impact of Blockchain On The Accounting ProfessionDocumento10 pagineThe Impact of Blockchain On The Accounting ProfessionMstefNessuna valutazione finora
- AgustaWestland AW 139 SN 41008 Reg M OLJMDocumento3 pagineAgustaWestland AW 139 SN 41008 Reg M OLJMPedro TaverasNessuna valutazione finora
- Section6 18 AutoflightDocumento24 pagineSection6 18 AutoflightTyler BröggerNessuna valutazione finora
- CRJ200 FM-PFZ (75) FCOM1 - ch22-3Documento8 pagineCRJ200 FM-PFZ (75) FCOM1 - ch22-3CHIMONessuna valutazione finora
- Refer To Figure 1: Sd3-60 Aircraft Maintenance ManualDocumento105 pagineRefer To Figure 1: Sd3-60 Aircraft Maintenance ManualИдэр ЗоригNessuna valutazione finora
- P180 Avanti-Flight Guidance SystemDocumento10 pagineP180 Avanti-Flight Guidance SystemDVSNessuna valutazione finora
- Ramp Test Set ATC-600A-2: Operation ManualDocumento101 pagineRamp Test Set ATC-600A-2: Operation ManualBradNessuna valutazione finora
- Introduction To G1000 Search Patterns: Minnesota Wing Advanced Aircrew TrainingDocumento42 pagineIntroduction To G1000 Search Patterns: Minnesota Wing Advanced Aircrew TrainingJudhi C ArdyantoNessuna valutazione finora
- Introduction To G1000 Search Patterns: Minnesota Wing Advanced Aircrew TrainingDocumento42 pagineIntroduction To G1000 Search Patterns: Minnesota Wing Advanced Aircrew TrainingJudhi C ArdyantoNessuna valutazione finora
- CasrDocumento88 pagineCasrdenokNessuna valutazione finora
- 02 - AW INSP COURSE DESCRIBITION & SillabusDocumento15 pagine02 - AW INSP COURSE DESCRIBITION & SillabusJudhi C ArdyantoNessuna valutazione finora
- CessnaDocumento17 pagineCessnaJudhi C ArdyantoNessuna valutazione finora
- 190 00303 82 - DDocumento12 pagine190 00303 82 - DJudhi C ArdyantoNessuna valutazione finora
- CASR Part 39 Amdt. 2 - Airworthiness DirectivesDocumento6 pagineCASR Part 39 Amdt. 2 - Airworthiness DirectivesHarry NuryantoNessuna valutazione finora
- 190 00303 82 - DDocumento12 pagine190 00303 82 - DJudhi C ArdyantoNessuna valutazione finora
- BAEDocumento528 pagineBAEJudhi C ArdyantoNessuna valutazione finora
- E-04 Programing ManualDocumento9 pagineE-04 Programing Manualsl4metNessuna valutazione finora
- Ficha Audio Evacuacion Notifier NFC-50-100EDocumento6 pagineFicha Audio Evacuacion Notifier NFC-50-100EEmmanuel CorderoNessuna valutazione finora
- Welcome To The Wikipedia Dashboard!: Purge This PageDocumento3 pagineWelcome To The Wikipedia Dashboard!: Purge This PageLuis Delascar Valencia MenaNessuna valutazione finora
- Epicor ERP 10 Colombia Country Specific Functionality GuideDocumento73 pagineEpicor ERP 10 Colombia Country Specific Functionality GuideMMBNessuna valutazione finora
- Epson PX710 TX710 PX720 TX720 PX730 TX730 PX810 TX810 PX820 TX820 PX830 PDFDocumento324 pagineEpson PX710 TX710 PX720 TX720 PX730 TX730 PX810 TX810 PX820 TX820 PX830 PDFIon IonutNessuna valutazione finora
- Full Stack Development in 7 DaysDocumento4 pagineFull Stack Development in 7 DaysHarshad Pawar PatilNessuna valutazione finora
- Engineering Mechanics by Beer and Johnston PDF Google Search PDFDocumento2 pagineEngineering Mechanics by Beer and Johnston PDF Google Search PDFGaurab SarkarNessuna valutazione finora
- Chapter3 Python Fot Chemical EngineersDocumento84 pagineChapter3 Python Fot Chemical EngineersJonathan van der MeerNessuna valutazione finora
- Configure NodeB on CMEDocumento9 pagineConfigure NodeB on CMEAkoo MeraNessuna valutazione finora
- Ethernet Ip Protocol PDFDocumento2 pagineEthernet Ip Protocol PDFMichaelNessuna valutazione finora
- Dynamic - Web - Page - Development: Lab ManualDocumento80 pagineDynamic - Web - Page - Development: Lab ManualSmit PankhaniaNessuna valutazione finora
- HR 2-Email DraftDocumento4 pagineHR 2-Email DraftMallu SailajaNessuna valutazione finora
- Maths I SSC Board Paper and Practice Papers PDFDocumento155 pagineMaths I SSC Board Paper and Practice Papers PDFshrikantNessuna valutazione finora
- Control the aircraft and its systems with keyboard shortcutsDocumento1 paginaControl the aircraft and its systems with keyboard shortcutsGiuliano MerelliNessuna valutazione finora
- Draft IND Remarks For NFAP-2011Documento9 pagineDraft IND Remarks For NFAP-2011ssukurNessuna valutazione finora
- A B C D: Sub Criteria ID Sub - Criteria Name or Description Aspect Type O Obj S SubDocumento20 pagineA B C D: Sub Criteria ID Sub - Criteria Name or Description Aspect Type O Obj S SubakrommulaiNessuna valutazione finora
- Tedmore Flexmark Product Series Details - VukDocumento8 pagineTedmore Flexmark Product Series Details - VukWisan Nursamsi SidikNessuna valutazione finora
- ShaftCare Brochure Aug 2011 (Latest)Documento12 pagineShaftCare Brochure Aug 2011 (Latest)Nhat TranNessuna valutazione finora
- ZXR10 3900A/3200A Series: Hardware Installation ManualDocumento51 pagineZXR10 3900A/3200A Series: Hardware Installation ManualBrian GreveNessuna valutazione finora
- Case Study Exceptions and Investigations National Bank of CanadaDocumento2 pagineCase Study Exceptions and Investigations National Bank of CanadaaNessuna valutazione finora
- (IJCST-V9I2P10) :DR - Shine N DasDocumento6 pagine(IJCST-V9I2P10) :DR - Shine N DasEighthSenseGroupNessuna valutazione finora
- MIT15 S12F18 Ses1Documento43 pagineMIT15 S12F18 Ses1Nikhil PatelNessuna valutazione finora
- Sinamics v20 BrochureDocumento20 pagineSinamics v20 BrochureSudipto MajumderNessuna valutazione finora
- Configuration IS PH en PDFDocumento22 pagineConfiguration IS PH en PDFbenjamin saavedraNessuna valutazione finora
- SpringerNature Books Title List 20200505 082846Documento350 pagineSpringerNature Books Title List 20200505 082846alan ortegaNessuna valutazione finora
- Intel 8085 Microprocessor ArchitectureDocumento10 pagineIntel 8085 Microprocessor ArchitectureemdzeiiNessuna valutazione finora
- DELHI PUBLIC SCHOOL PRE-BOARD EXAM PAPERDocumento4 pagineDELHI PUBLIC SCHOOL PRE-BOARD EXAM PAPERSanika TalathiNessuna valutazione finora
- Lesson 7 - InfographicsDocumento40 pagineLesson 7 - InfographicsKeziah SorianoNessuna valutazione finora