Potrebbero piacerti anche
- General Motor Relearn ProceduresDocumento8 pagineGeneral Motor Relearn Procedurescherokewag86% (7)
- Jeep Cherokee - Grand Cherokee 1993 - 1997Documento1 paginaJeep Cherokee - Grand Cherokee 1993 - 1997sluis770% (1)
- Module 14 QuestionsDocumento3 pagineModule 14 QuestionsKıvanc Terzioglu71% (7)
- Mechanical Four Wheels SteeringDocumento74 pagineMechanical Four Wheels Steeringvijayan m g91% (22)
- Volvo Service Manual Trucks FM FH PDFDocumento244 pagineVolvo Service Manual Trucks FM FH PDFMarco Diaz100% (2)
- Vehicle Dynamics and Damping: First Revised EditionDa EverandVehicle Dynamics and Damping: First Revised EditionValutazione: 4 su 5 stelle4/5 (2)
- Steering Mechanism With Zero Turning RadiusDocumento19 pagineSteering Mechanism With Zero Turning RadiusAbhay RanjanNessuna valutazione finora
- Nordwest Service Manual PDFDocumento136 pagineNordwest Service Manual PDFMartin KratkyNessuna valutazione finora
- Ford Mustang 1964 1/2 - 1973: How to Build & ModifyDa EverandFord Mustang 1964 1/2 - 1973: How to Build & ModifyNessuna valutazione finora
- Manual de Serviço Sportsman 570 PDFDocumento701 pagineManual de Serviço Sportsman 570 PDFAlef BehlingNessuna valutazione finora
- SPMT SpecificationsDocumento15 pagineSPMT SpecificationsAnonymous qT66pyKNessuna valutazione finora
- LED headlight wiring diagramDocumento11 pagineLED headlight wiring diagramBala ChandranNessuna valutazione finora
- 90 Degree Turning Motorized Steering MechanismDocumento62 pagine90 Degree Turning Motorized Steering MechanismMani Kandan100% (1)
- KB(G)25-35 Maintenance Guide OptimizationDocumento8 pagineKB(G)25-35 Maintenance Guide OptimizationcibacetasNessuna valutazione finora
- CD Deluxe Parts Catalog E-SectionsDocumento82 pagineCD Deluxe Parts Catalog E-SectionsjackcastelNessuna valutazione finora
- Hyosung Aquila 250GV - Manual de Despiece - InglesDocumento123 pagineHyosung Aquila 250GV - Manual de Despiece - Inglesjjq100% (1)
- Final Report of 360 Degree Rotating CarDocumento42 pagineFinal Report of 360 Degree Rotating CarP24 Innovation CenterNessuna valutazione finora
- Study of Four Wheel Steering Mechanism: JournalDocumento4 pagineStudy of Four Wheel Steering Mechanism: JournalSiva HariNessuna valutazione finora
- JETIR2305196Documento15 pagineJETIR2305196Shivam sinhaNessuna valutazione finora
- Ninty Degree SteeringDocumento48 pagineNinty Degree Steeringparas bhogulkarNessuna valutazione finora
- Optimization and Analysis of A Tilting Mechanism For A Narrow Tilting Car To Increase The Maximum Speed in CurvesDocumento23 pagineOptimization and Analysis of A Tilting Mechanism For A Narrow Tilting Car To Increase The Maximum Speed in CurvesJohn AjishNessuna valutazione finora
- Six Wheel Three Mode Steering System PDFDocumento6 pagineSix Wheel Three Mode Steering System PDFSEELAM HARSHAVARDHANREDDYNessuna valutazione finora
- Tribhuvan University Institute of Engineering Thapathali CampusDocumento10 pagineTribhuvan University Institute of Engineering Thapathali CampusRustam Alee KhanNessuna valutazione finora
- Development of FFOUR WHEELSour WheelsDocumento1 paginaDevelopment of FFOUR WHEELSour WheelsRaja SekarNessuna valutazione finora
- Design of 360 Degree Steering System: Saransh Tiwari Dr. Rajeev AryaDocumento6 pagineDesign of 360 Degree Steering System: Saransh Tiwari Dr. Rajeev AryaAkarsh AdiNessuna valutazione finora
- Ijetae 0315 90Documento3 pagineIjetae 0315 90Kevin RaviNessuna valutazione finora
- Research Paper On Four Wheel SteeringDocumento7 pagineResearch Paper On Four Wheel Steeringd1fytyt1man3100% (1)
- Study of Zero Turn Vehicle: Shirsathsachin, Jadhav Kiran, Patil Rahul, Mohite Abhilash, D.D. PatilDocumento8 pagineStudy of Zero Turn Vehicle: Shirsathsachin, Jadhav Kiran, Patil Rahul, Mohite Abhilash, D.D. Patilkush alladiNessuna valutazione finora
- Development of Four Wheel Steering System For A Car: K. Lohith, Dr. S. R. Shankapal, M. H. Monish GowdaDocumento8 pagineDevelopment of Four Wheel Steering System For A Car: K. Lohith, Dr. S. R. Shankapal, M. H. Monish GowdaGaurav PandeyNessuna valutazione finora
- Design and Fabrication of Multifunctional Steering MechanismDocumento14 pagineDesign and Fabrication of Multifunctional Steering MechanismVivek DoiphodeNessuna valutazione finora
- Project SynapsisDocumento6 pagineProject Synapsisnayan RNessuna valutazione finora
- Four Wheel SteeringDocumento5 pagineFour Wheel SteeringMectrosoft Creative technologyNessuna valutazione finora
- Four-Wheel SteeringDocumento17 pagineFour-Wheel SteeringSarang VasugadeNessuna valutazione finora
- Four Wheel Steering CarDocumento6 pagineFour Wheel Steering CartrishulNessuna valutazione finora
- Four Wheels SteeringDocumento19 pagineFour Wheels SteeringBharathNaikPanjaNessuna valutazione finora
- Zero-Turn Radius Car MechanismDocumento43 pagineZero-Turn Radius Car MechanismManjeet SinghNessuna valutazione finora
- 90 Degree Steering Mechanism#Documento19 pagine90 Degree Steering Mechanism#69 Abhishek PandeyNessuna valutazione finora
- Reduced Turning RadiusDocumento41 pagineReduced Turning RadiusShubham ShirkandeNessuna valutazione finora
- Smart Steering SystemDocumento8 pagineSmart Steering SystemShahzad Rasheed100% (1)
- 360 Rotating Trolly Shubham Rawat ProjectDocumento30 pagine360 Rotating Trolly Shubham Rawat ProjectShubham RawatNessuna valutazione finora
- Zero Radius Turning and Four Wheel Steering SystemDocumento27 pagineZero Radius Turning and Four Wheel Steering SystemNikhil KumarNessuna valutazione finora
- Four WheelDocumento14 pagineFour WheelMaheshNessuna valutazione finora
- 3 Mode SteeringDocumento30 pagine3 Mode SteeringAnonymous j0aO95fgNessuna valutazione finora
- Steering SystemDocumento12 pagineSteering Systemmayur_lanjewarNessuna valutazione finora
- Wheel Steering System PDFDocumento6 pagineWheel Steering System PDFvivek ghoriNessuna valutazione finora
- 4 Wheel SterringDocumento8 pagine4 Wheel Sterringrkh02992Nessuna valutazione finora
- Four Wheels SteeringDocumento18 pagineFour Wheels SteeringArpith KumarNessuna valutazione finora
- LBYMREU Final Project DocumentationDocumento7 pagineLBYMREU Final Project DocumentationAudrian Louven Realubit SabadoNessuna valutazione finora
- Three Mode Steering System For Light Weight Automobile VehiclesDocumento4 pagineThree Mode Steering System For Light Weight Automobile VehiclesijsretNessuna valutazione finora
- Project ReportDocumento21 pagineProject ReportSanniChChureNessuna valutazione finora
- Front Wheel Stearing Moveable HeadlightsDocumento42 pagineFront Wheel Stearing Moveable HeadlightsVinoth RamNessuna valutazione finora
- Car Parking With 90° RotationDocumento10 pagineCar Parking With 90° RotationIJRASETPublicationsNessuna valutazione finora
- Design and Fabrication of Two Modes of Steering FinalDocumento38 pagineDesign and Fabrication of Two Modes of Steering FinalS18M168 SUJAN BALAJI SNessuna valutazione finora
- Fabrication of Four Wheel Steering System: Suraj Kumar Sumit Kumar Vikash Kumar Vivek Singh YadavDocumento20 pagineFabrication of Four Wheel Steering System: Suraj Kumar Sumit Kumar Vikash Kumar Vivek Singh Yadavvishnu9746567525Nessuna valutazione finora
- Advanced Four Wheel Steering SystemDocumento5 pagineAdvanced Four Wheel Steering SystemSyedAbuBakar'sAlkaffNessuna valutazione finora
- 360 Degree Rotating Car DesignDocumento5 pagine360 Degree Rotating Car DesignabiNessuna valutazione finora
- All Wheel Steering Project 22Documento3 pagineAll Wheel Steering Project 22Snev EvansNessuna valutazione finora
- Mechanical Engineering Department Sports Car ProjectDocumento25 pagineMechanical Engineering Department Sports Car Projectdipesh sharmaNessuna valutazione finora
- Auto Engg 1-Merged CompressedDocumento133 pagineAuto Engg 1-Merged CompressedSunil AundhekarNessuna valutazione finora
- SteeringDocumento24 pagineSteeringapi-19890903Nessuna valutazione finora
- 4 Wheel Steering SystemDocumento7 pagine4 Wheel Steering Systemबृज भूषण सिंह100% (1)
- 360-Degree Rotating Vehicle Saves Time & SpaceDocumento2 pagine360-Degree Rotating Vehicle Saves Time & SpaceNIES TRAINING CENTERNessuna valutazione finora
- MEC103Documento2 pagineMEC103Vinay KumarNessuna valutazione finora
- Project_report BOOKDocumento25 pagineProject_report BOOKRAMESH CHANDRAN ENessuna valutazione finora
- Four Wheel, Three Mode Steering System - 3Documento9 pagineFour Wheel, Three Mode Steering System - 3Tejzas Parab100% (1)
- Hilal Ahmad 1Documento42 pagineHilal Ahmad 1Moin ul IslamNessuna valutazione finora
- Front Wheel Drive V/S Rear Wheel Drive: Vineeth CsDocumento11 pagineFront Wheel Drive V/S Rear Wheel Drive: Vineeth CsSurajbhan BheemNessuna valutazione finora
- Dual Mode Four Wheel Steering System: Sanu Adolphus Sooraj AbrahamDocumento7 pagineDual Mode Four Wheel Steering System: Sanu Adolphus Sooraj AbrahamVincent RobinsonNessuna valutazione finora
- Research Paper On Four Wheel Steering MechanismDocumento7 pagineResearch Paper On Four Wheel Steering Mechanismnyl1hij0fup3Nessuna valutazione finora
- Front Wheel Steering System With Movable Hedlights Ijariie5360Documento6 pagineFront Wheel Steering System With Movable Hedlights Ijariie5360Ifra KhanNessuna valutazione finora
- Esploso Caliber MY08Documento525 pagineEsploso Caliber MY08SsktpNessuna valutazione finora
- Marine transmission KMH50A specificationsDocumento2 pagineMarine transmission KMH50A specificationsmike pappasNessuna valutazione finora
- Honda TAIHODocumento6 pagineHonda TAIHOJdk SparepartsNessuna valutazione finora
- CGE Quester Spec Sheet E29Documento2 pagineCGE Quester Spec Sheet E29Ruveen Jeetun100% (1)
- Review of Mcpherson Strut Suspension (Courtesy of Science Direct)Documento4 pagineReview of Mcpherson Strut Suspension (Courtesy of Science Direct)Srikar ChinmayaNessuna valutazione finora
- Experiment No. 4Documento12 pagineExperiment No. 4Jake Polo SantiagoNessuna valutazione finora
- E-Scooter User Manual GuideDocumento38 pagineE-Scooter User Manual Guiderod excelNessuna valutazione finora
- Service: Touran 2003Documento360 pagineService: Touran 2003nicola mentiNessuna valutazione finora
- Injection Pump Specification ©Documento4 pagineInjection Pump Specification ©admin tigasaudaraNessuna valutazione finora
- Mak Engine Selection Guide2010 PDFDocumento29 pagineMak Engine Selection Guide2010 PDFengkos koswaraNessuna valutazione finora
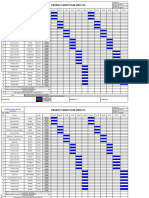
- Product Audit PlanDocumento2 pagineProduct Audit PlanMUNENDRA SHAKYANessuna valutazione finora
- Volvo Penta Prop Nuts & WashersDocumento2 pagineVolvo Penta Prop Nuts & WashersMarine Parts ChinaNessuna valutazione finora
- C Loth Seat - OptionalDocumento3 pagineC Loth Seat - Optionalcrash2804Nessuna valutazione finora
- Toyota New Pricelist (9 Nov 2023) - UpdatedDocumento2 pagineToyota New Pricelist (9 Nov 2023) - Updatedmingwei72Nessuna valutazione finora
- Alluxindo Pratama Sukses Mining Equipment ListDocumento1 paginaAlluxindo Pratama Sukses Mining Equipment ListArdi dutaNessuna valutazione finora
- Radon ZR Race 29er 6Documento3 pagineRadon ZR Race 29er 6macfiaNessuna valutazione finora
- DoppelmayrDocumento21 pagineDoppelmayrGretchen BurnsNessuna valutazione finora
- Bobcat E45 Spec Sheet 1Documento2 pagineBobcat E45 Spec Sheet 1Ainur Bamol NamsembilanNessuna valutazione finora
- Paskey 3Documento2 paginePaskey 3Rogelio ArenasNessuna valutazione finora