Potrebbero piacerti anche
- Convivencia de Inicio de Curso 2021 2022Documento7 pagineConvivencia de Inicio de Curso 2021 2022Kevin Galarreta Sanchez57% (7)
- Metodología básica de instrumentación industrial y electrónicaDa EverandMetodología básica de instrumentación industrial y electrónicaValutazione: 4 su 5 stelle4/5 (12)
- Instrumentación electrónica aplicada: Prácticas de laboratorioDa EverandInstrumentación electrónica aplicada: Prácticas de laboratorioValutazione: 3.5 su 5 stelle3.5/5 (7)
- Control automático aplicado: Prácticas de laboratorio 2da. EdiciónDa EverandControl automático aplicado: Prácticas de laboratorio 2da. EdiciónValutazione: 3.5 su 5 stelle3.5/5 (5)
- Gasolinera PemexDocumento5 pagineGasolinera PemexJoshbagabaga BasurtoNessuna valutazione finora
- Automatización IndustrialDocumento5 pagineAutomatización IndustrialOmar Castillo ParedesNessuna valutazione finora
- Dextrosa Al 5Documento10 pagineDextrosa Al 5cintyamorales100% (6)
- A1 UjbvDocumento6 pagineA1 Ujbvjose moneda0% (2)
- MECATRÓNICA CONTROL Y AUTOMATIZACIÓNDa EverandMECATRÓNICA CONTROL Y AUTOMATIZACIÓNValutazione: 5 su 5 stelle5/5 (1)
- Modelado de Sistemas MecatrónicosDocumento7 pagineModelado de Sistemas MecatrónicosDAYANessuna valutazione finora
- Programación matemática para la economía y la empresaDa EverandProgramación matemática para la economía y la empresaNessuna valutazione finora
- Planificación Maquinas Eléctricas y Automatismos 6to Año EETN1Documento3 paginePlanificación Maquinas Eléctricas y Automatismos 6to Año EETN1Pepe MorenoNessuna valutazione finora
- Silabo Sistemas de Control II Unmsm 2019 II Por CompetenciaDocumento8 pagineSilabo Sistemas de Control II Unmsm 2019 II Por CompetenciaDiego Arturo Solano OrellanaNessuna valutazione finora
- Ingenieria de ControlDocumento7 pagineIngenieria de ControlLuceroMilagrosCubaMirandaNessuna valutazione finora
- Laboratorio de Robotica 2021Documento5 pagineLaboratorio de Robotica 2021Alejandro ChavezNessuna valutazione finora
- Manual de Practica 1Documento17 pagineManual de Practica 1Hector Geovanni Cervantes Jimenez100% (1)
- Practica 2A 2B 2C Control AutomaticoDocumento8 paginePractica 2A 2B 2C Control AutomaticoJOSUE MARTIN MEDRANO CHIANessuna valutazione finora
- Manual Practica 4 (PD)Documento20 pagineManual Practica 4 (PD)Hector Geovanni Cervantes JimenezNessuna valutazione finora
- Examen Electronica Digital P1-RemedialDocumento3 pagineExamen Electronica Digital P1-RemedialPatricia Lizette GuzmanNessuna valutazione finora
- Laboratorio n3 (4) Esta Mier Da Se PrendioDocumento10 pagineLaboratorio n3 (4) Esta Mier Da Se PrendioJHON JAIRO RAMIREZ MATEUSNessuna valutazione finora
- Silabo 2023-I INGENIERÍA DEL CONTROL Y LA AUTOMATIZACIÓN ADocumento6 pagineSilabo 2023-I INGENIERÍA DEL CONTROL Y LA AUTOMATIZACIÓN Aandres ramsay agipNessuna valutazione finora
- Silabo 2024-I INGENIERÍA DEL CONTROL Y LA AUTOMATIZACIÓN ADocumento9 pagineSilabo 2024-I INGENIERÍA DEL CONTROL Y LA AUTOMATIZACIÓN Aj78109808Nessuna valutazione finora
- Silabo Sistemas de Control - 2021 - BDocumento8 pagineSilabo Sistemas de Control - 2021 - BsebastianNessuna valutazione finora
- Clase 1 Introducción ElectrónicaDocumento54 pagineClase 1 Introducción ElectrónicaEddyNessuna valutazione finora
- PLAN DE TRABAJO Control IIDocumento6 paginePLAN DE TRABAJO Control IIWilmer OscoNessuna valutazione finora
- Silabo de Sistemas de Control Industrial IiDocumento6 pagineSilabo de Sistemas de Control Industrial IiFernando AtalayaNessuna valutazione finora
- Informe Previo Nro. 1 de Laboratorio de Sistemas de Control II Diseño de Controladores AnalógicosDocumento2 pagineInforme Previo Nro. 1 de Laboratorio de Sistemas de Control II Diseño de Controladores AnalógicosAntoni BaldeonNessuna valutazione finora
- Instrumentación IndustrialDocumento6 pagineInstrumentación IndustrialAnthony ChicaNessuna valutazione finora
- Syllabus Control IiDocumento9 pagineSyllabus Control IirenatoNessuna valutazione finora
- Modulo Tpi - 2013Documento28 pagineModulo Tpi - 2013Kenia ZarateNessuna valutazione finora
- Silabos Comp Ml611-2020-I PDFDocumento8 pagineSilabos Comp Ml611-2020-I PDFBrajan Chumpitaz SeguraNessuna valutazione finora
- Lab 3 Controlador Digital MotorDocumento5 pagineLab 3 Controlador Digital MotorMariana HerreraNessuna valutazione finora
- Controles AutomàticosDocumento7 pagineControles AutomàticosAnonymous eNwHxg6RNessuna valutazione finora
- Práctica PWM Electronica III LaboratorioU - CentralDocumento5 paginePráctica PWM Electronica III LaboratorioU - CentralJuan David LeguizamonNessuna valutazione finora
- Control Autom Tico 2 Esquemas Modelamiento Linearizaci N IDocumento23 pagineControl Autom Tico 2 Esquemas Modelamiento Linearizaci N IJoel PPPNessuna valutazione finora
- Informes AutomatizacionDocumento1 paginaInformes AutomatizacionRaian Sta Anita EN JaKeNessuna valutazione finora
- Sílabo Control AdaptativoDocumento6 pagineSílabo Control AdaptativowilliamNessuna valutazione finora
- Sílabo Control Automático 2018-IDocumento17 pagineSílabo Control Automático 2018-IFidel Andía GuzmánNessuna valutazione finora
- Glab - S06 - Gmerello - 2021-02Documento22 pagineGlab - S06 - Gmerello - 2021-02jorge albertoNessuna valutazione finora
- Ua2 G2 Imar01Documento4 pagineUa2 G2 Imar01Jorge Andrés Pérez MillarNessuna valutazione finora
- Desarrollo Lab 1Documento2 pagineDesarrollo Lab 1Andres Giovanni Romero MuñozNessuna valutazione finora
- Silabo Cont Automatico II-2020-IDocumento10 pagineSilabo Cont Automatico II-2020-Imayquer lin delgadillo perezNessuna valutazione finora
- Lab 1-GPIODocumento4 pagineLab 1-GPIOsantiago gomezNessuna valutazione finora
- Informe 5 PWMDocumento3 pagineInforme 5 PWMOmar Andres Melo CortesNessuna valutazione finora
- Math1202a Calculo 2Documento2 pagineMath1202a Calculo 2Jenifer BustamanteNessuna valutazione finora
- Clase I - Calculo Númerico Computacional PDFDocumento27 pagineClase I - Calculo Númerico Computacional PDFErick Brayan Aguilar AriasNessuna valutazione finora
- Silabo Ingeniería de Control Por Competencias 19VDocumento9 pagineSilabo Ingeniería de Control Por Competencias 19VEduardo MartinezNessuna valutazione finora
- Silabo 2019-II Investigación de Operaciones I BDocumento12 pagineSilabo 2019-II Investigación de Operaciones I BDaniel Cachay del AguilaNessuna valutazione finora
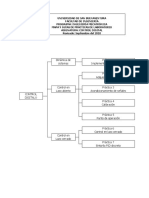
- Control DigitalDocumento3 pagineControl DigitalArturo Ramirez PeñaNessuna valutazione finora
- Informe 1Documento6 pagineInforme 1Andres Alexi Arreaga BetancourtNessuna valutazione finora
- Sil Invope1Documento9 pagineSil Invope1Prodygy 2308Nessuna valutazione finora
- Practica 1Documento4 paginePractica 1nickyero593Nessuna valutazione finora
- SILABO Automatismo y Control de Procesos 2021-NDocumento6 pagineSILABO Automatismo y Control de Procesos 2021-NPiero Archi VioNessuna valutazione finora
- Electricidad Industrial Mod 5Documento20 pagineElectricidad Industrial Mod 5joseNessuna valutazione finora
- 14-15 Ga 563000030 Instrumentación y ControlDocumento12 pagine14-15 Ga 563000030 Instrumentación y Controljorgemendoza1987Nessuna valutazione finora
- M Ingenieria Control 2024-1Documento67 pagineM Ingenieria Control 2024-1Archita DasNessuna valutazione finora
- Guias 2012A-Control DigitalDocumento13 pagineGuias 2012A-Control DigitalAndres OchoaNessuna valutazione finora
- E2.Lenguaje Programación S2 TipoCDocumento2 pagineE2.Lenguaje Programación S2 TipoCLgMarrujoNessuna valutazione finora
- ABPro HMI RedesDocumento6 pagineABPro HMI RedesJorge Alvarez AravenaNessuna valutazione finora
- CompensadoresDocumento4 pagineCompensadoresjancarlos bermudezNessuna valutazione finora
- 92.06 Automatización Industrial y RobóticaDocumento7 pagine92.06 Automatización Industrial y Robóticaanon_242354499Nessuna valutazione finora
- Anisidina Peroxido Ag2283527Documento1 paginaAnisidina Peroxido Ag2283527Henry GuerreroNessuna valutazione finora
- Tarea VerticalizadorDocumento5 pagineTarea VerticalizadorDania MartinezNessuna valutazione finora
- Nomenclatura en Química InorgánicaDocumento11 pagineNomenclatura en Química InorgánicaRodolfo Mora QuesadaNessuna valutazione finora
- Precipitación en Siete PasosDocumento5 paginePrecipitación en Siete PasosNatalia Muñoz GutierrezNessuna valutazione finora
- PR Actica 6. Espacios Con Producto Interno. Algebra Lineal 2011. 2do A No Lic. Matem Atica y ProfesoradoDocumento3 paginePR Actica 6. Espacios Con Producto Interno. Algebra Lineal 2011. 2do A No Lic. Matem Atica y ProfesoradoNelson GonzalesNessuna valutazione finora
- Tarea - Tarea N°4Documento1 paginaTarea - Tarea N°4Alex Darwin TapiaNessuna valutazione finora
- Preguntas de Trilce Odria - Belaunde 1º GDocumento5 paginePreguntas de Trilce Odria - Belaunde 1º GLuis Diaz33% (3)
- Tarea 3.1 Primer Avance Proyecto FinalDocumento4 pagineTarea 3.1 Primer Avance Proyecto FinalMayli VasquezNessuna valutazione finora
- Los Origenes de La Poesia SonoraDocumento8 pagineLos Origenes de La Poesia Sonoralunavic2Nessuna valutazione finora
- Principios de La Educación Peruana y Enfoques TransversalesDocumento10 paginePrincipios de La Educación Peruana y Enfoques TransversalesRubelinda100% (1)
- Normas Éticas en La Relación Entre Culturas SintesisDocumento2 pagineNormas Éticas en La Relación Entre Culturas SintesisFrancisco VillatoroNessuna valutazione finora
- Hernia Del Hiato - DPIDocumento13 pagineHernia Del Hiato - DPIgiancarlos fabrizioNessuna valutazione finora
- Soldadura Por ArcoDocumento6 pagineSoldadura Por ArcoLuis GuerreroNessuna valutazione finora
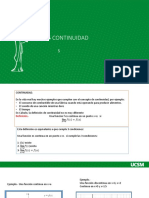
- Clase 4 Continuidadde Una FunciónDocumento16 pagineClase 4 Continuidadde Una FunciónKim MendozaNessuna valutazione finora
- Resumen Metodo OwasDocumento12 pagineResumen Metodo OwasEmanuel Peña MelendezNessuna valutazione finora
- Teoria de Los Test 04 05 2020Documento3 pagineTeoria de Los Test 04 05 2020Deuri KingNessuna valutazione finora
- Tramas Económicas PDFDocumento24 pagineTramas Económicas PDFJuan Pablo FerreiroNessuna valutazione finora
- Actividad3 Etapa2 Perez VicenteDocumento3 pagineActividad3 Etapa2 Perez VicenteCarlosNessuna valutazione finora
- La Muerte de Jaime Roldós - Oscar ChiribogaDocumento2 pagineLa Muerte de Jaime Roldós - Oscar ChiribogaEnrrique ZambranoNessuna valutazione finora
- Desarrollo de Software Dirigido Por Modelos PDFDocumento118 pagineDesarrollo de Software Dirigido Por Modelos PDFEzequiel RdzNessuna valutazione finora
- TradicionesDocumento3 pagineTradicionesWithney Andrea Quinto AylasNessuna valutazione finora
- U01.1 Metrologia Unidad 1 2020 SEGUNDA EDICIONDocumento18 pagineU01.1 Metrologia Unidad 1 2020 SEGUNDA EDICIONProfe CHavesNessuna valutazione finora
- Contestacion Demanda Patricia LelalDocumento12 pagineContestacion Demanda Patricia LelalCarlos Javier Dorado PerafanNessuna valutazione finora
- Kharemm Pasos Matematicas Financieras NEDocumento20 pagineKharemm Pasos Matematicas Financieras NEISISNessuna valutazione finora
- GC-FT-188 Ficha Tecnica de Producto Terminado Rastrillo JardinDocumento1 paginaGC-FT-188 Ficha Tecnica de Producto Terminado Rastrillo JardinMarlon Esteban MARQUEZ LOPEZNessuna valutazione finora
- Clase Orientación. La AmistadDocumento4 pagineClase Orientación. La AmistadvinoconheladoNessuna valutazione finora