Potrebbero piacerti anche
- PID Controllers: Abhishek Mehta EEE Department UIET, Panjab University September 11,2015Documento18 paginePID Controllers: Abhishek Mehta EEE Department UIET, Panjab University September 11,2015aditee saxenaaNessuna valutazione finora
- Types of Controllers: P, I, D, PI, PD, and PID ControllersDocumento5 pagineTypes of Controllers: P, I, D, PI, PD, and PID Controllerspratik chakrabortyNessuna valutazione finora
- UPSC Syllabus - IAS Syllabus 2022 - Syllabus For UPSC 2022Documento12 pagineUPSC Syllabus - IAS Syllabus 2022 - Syllabus For UPSC 2022Subhasish DashNessuna valutazione finora
- PID Tuning TutorDocumento4 paginePID Tuning TutorKiran KulkarniNessuna valutazione finora
- Pid Controller Tuning in SimulinkDocumento7 paginePid Controller Tuning in SimulinkRicael SpirandeliNessuna valutazione finora
- Tuning of PID Controller Using Ziegler-NicholsDocumento16 pagineTuning of PID Controller Using Ziegler-NicholsPraveen Meena100% (1)
- R2B-P2-205-03-H-CE-47233 - Rev.E - Code ADocumento2 pagineR2B-P2-205-03-H-CE-47233 - Rev.E - Code Adaniel contrerasNessuna valutazione finora
- Control Systems Lect. 4 PIDDocumento65 pagineControl Systems Lect. 4 PIDhmaymadNessuna valutazione finora
- The Basics of Tuning PID Loops: First, Some DefinitionsDocumento5 pagineThe Basics of Tuning PID Loops: First, Some DefinitionsRaj Kumar AhmedNessuna valutazione finora
- Purge Panel DrawingDocumento7 paginePurge Panel DrawingSudeeb KumarNessuna valutazione finora
- Power Plant BasicsDocumento80 paginePower Plant BasicsGana Pathi TNessuna valutazione finora
- Scaling ProgramDocumento6 pagineScaling ProgramElmer RemleNessuna valutazione finora
- TB2-SDC - VPM210171-00100-M-M1B-PFD-0001 Rev0Documento23 pagineTB2-SDC - VPM210171-00100-M-M1B-PFD-0001 Rev0Ba Giao NguyenNessuna valutazione finora
- Kpo 00 Elt SPC 00029Documento29 pagineKpo 00 Elt SPC 00029rameshqc100% (1)
- MCBDocumento84 pagineMCBShazia TabassumNessuna valutazione finora
- Simple Process Control Loop (With Negative Feedback)Documento55 pagineSimple Process Control Loop (With Negative Feedback)Ankan Bhunia100% (1)
- New Backup Pump P&id (Rev16)Documento1 paginaNew Backup Pump P&id (Rev16)AhmedNessuna valutazione finora
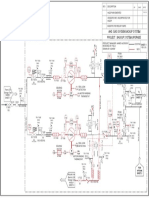
- Stripping With Direct Steam InjectionDocumento1 paginaStripping With Direct Steam InjectionFran LeeNessuna valutazione finora
- AKM Final Report (4283)Documento31 pagineAKM Final Report (4283)Gaurav BhatiaNessuna valutazione finora
- Tor1-22015mv001 r8 MV-VFD Elect Drawings 220-Er-015 260kw Referencial Abb RockwellDocumento22 pagineTor1-22015mv001 r8 MV-VFD Elect Drawings 220-Er-015 260kw Referencial Abb Rockwellsareluis30Nessuna valutazione finora
- List of Experiments: S. No Name of The Experiment Any Eight Experiments Should Be ConductedDocumento100 pagineList of Experiments: S. No Name of The Experiment Any Eight Experiments Should Be ConductedGangula Praneeth ReddyNessuna valutazione finora
- Fakorede Samson Taiwo: Customer StatementDocumento6 pagineFakorede Samson Taiwo: Customer StatementIfetayo Osifeso-FakoredeNessuna valutazione finora
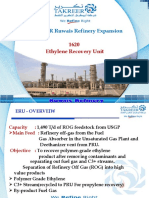
- Vdocuments - MX 1620 Ethylene Recovery Unitpptx 1601970425506Documento31 pagineVdocuments - MX 1620 Ethylene Recovery Unitpptx 1601970425506Shabir MansuriNessuna valutazione finora
- Release Notice: PCB Outline DrawingDocumento5 pagineRelease Notice: PCB Outline DrawingsunilbeedasseeNessuna valutazione finora
- Process Instrumentation Module 4Documento68 pagineProcess Instrumentation Module 4ibuddhaNessuna valutazione finora
- R420-FR-2130 A/B: NotesDocumento1 paginaR420-FR-2130 A/B: NotesMubashir fareed100% (1)
- 5 1 IONE 1B02 PE CM 9501 Rev 0 - Emergency ShutdownDocumento21 pagine5 1 IONE 1B02 PE CM 9501 Rev 0 - Emergency Shutdowndhiaa mohammedNessuna valutazione finora
- Ips-mbd18002-In-517 Rev. A - Ls Top MountedDocumento8 pagineIps-mbd18002-In-517 Rev. A - Ls Top MountedNikhil KarkeraNessuna valutazione finora
- Lube Oil System in Turbine - Instrumentation BasicsDocumento5 pagineLube Oil System in Turbine - Instrumentation BasicsWren DsilvaNessuna valutazione finora
- Instruction Manual: Smart Valve PositionerDocumento52 pagineInstruction Manual: Smart Valve Positionerabbas dehghanNessuna valutazione finora
- Write-Up On TsiDocumento4 pagineWrite-Up On TsiKhushboo PandeyNessuna valutazione finora
- Intelligent MCC InterfaceDocumento1 paginaIntelligent MCC InterfaceamjadnawazNessuna valutazione finora
- Project On Power System AYUSH 11Documento33 pagineProject On Power System AYUSH 11VeekeshGuptaNessuna valutazione finora
- Social Media TestDocumento35 pagineSocial Media TestSarah Knepper0% (2)
- Sample of P&ID Marked Up DrawingDocumento11 pagineSample of P&ID Marked Up DrawingToniNessuna valutazione finora
- My Top Skills:-: Short BioDocumento7 pagineMy Top Skills:-: Short BiosanchayanNessuna valutazione finora
- PID ControllerDocumento18 paginePID ControllerCheng Khie Chieh100% (1)
- Process Design Engineering-1 PDFDocumento8 pagineProcess Design Engineering-1 PDFErmes Rosario ErmesNessuna valutazione finora
- P&ID - Legend SheetDocumento12 pagineP&ID - Legend SheetMinh Sang Phạm HuỳnhNessuna valutazione finora
- 00-Corporate Presentation Ben 2007-10-08Documento15 pagine00-Corporate Presentation Ben 2007-10-08Malik HamzaNessuna valutazione finora
- V4-CH03-Process Interlock Description Rev 1 - SECTION 200 TO 800Documento111 pagineV4-CH03-Process Interlock Description Rev 1 - SECTION 200 TO 800MohamedNessuna valutazione finora
- Control SystemsDocumento38 pagineControl Systemsضياء محمدNessuna valutazione finora
- B 126063001 PaDocumento10 pagineB 126063001 Pazizu1234Nessuna valutazione finora
- Signal Flow Diagram: Electronics Division, Bangalore - 26Documento65 pagineSignal Flow Diagram: Electronics Division, Bangalore - 26Deepak GuptaNessuna valutazione finora
- Sh1 To Mt1 Empty BinDocumento6 pagineSh1 To Mt1 Empty BinBoddapalli sureshNessuna valutazione finora
- VF006-IN-ILD-0002 - Instrument Loop Drawing - Rev.0Documento197 pagineVF006-IN-ILD-0002 - Instrument Loop Drawing - Rev.0Phạm Tấn PhướcNessuna valutazione finora
- PID Controller Working Principle Explained For BeginnersDocumento6 paginePID Controller Working Principle Explained For BeginnersPramillaNessuna valutazione finora
- PID ControllersDocumento6 paginePID ControllersNguyễn HảiNessuna valutazione finora
- The Working Principle of A PID Controller For BeginnersDocumento15 pagineThe Working Principle of A PID Controller For BeginnersSaber AbdelaalNessuna valutazione finora
- How Does A PID Controller Work - Structure & Tuning MethodsDocumento12 pagineHow Does A PID Controller Work - Structure & Tuning Methodsmurugan1984Nessuna valutazione finora
- What Is A PID ControllerDocumento11 pagineWhat Is A PID ControllerANRG Batch 11Nessuna valutazione finora
- Working or Operation of PID ControllerDocumento7 pagineWorking or Operation of PID Controllerjohn glenn magnoNessuna valutazione finora
- Design and Tuning of Fuzzy Logic PID ControllerDocumento19 pagineDesign and Tuning of Fuzzy Logic PID ControllerPriya BhardwajNessuna valutazione finora
- PID ControllerDocumento16 paginePID ControllerDevarya ChhibberNessuna valutazione finora
- Control SystemsDocumento18 pagineControl Systemsgayatri jaltareNessuna valutazione finora
- Module 10 - Loop TuningDocumento41 pagineModule 10 - Loop TuningHtet LwinNessuna valutazione finora
- Name: Roll: Year: Department: Subject: Subject CodeDocumento11 pagineName: Roll: Year: Department: Subject: Subject CodeMayukh BiswasNessuna valutazione finora
- 1 - 1 - IntroducaoDocumento31 pagine1 - 1 - IntroducaoAndré GomesNessuna valutazione finora
- 3.0 Literature Review 3.1 P ControllerDocumento12 pagine3.0 Literature Review 3.1 P ControllerMalek Marry AnneNessuna valutazione finora
- Proportional Integral Derivative (PID)Documento27 pagineProportional Integral Derivative (PID)GilagidkidNessuna valutazione finora
- Electrical Power Utilization - Leds: Guide: Dr. S.S. BhattDocumento44 pagineElectrical Power Utilization - Leds: Guide: Dr. S.S. BhattAbhilash MallikarjunaNessuna valutazione finora
- Sodium Vapour LampDocumento41 pagineSodium Vapour LampAbhilash MallikarjunaNessuna valutazione finora
- Elcb Shock PreventorDocumento26 pagineElcb Shock Preventorandre yozzaNessuna valutazione finora
- M. Hari Priya, 2. Megha Pandey, 053 3. Meekala Nikitha, 054 4. Manas Mondal, 056 5. Nachiket Bapat, 057Documento16 pagineM. Hari Priya, 2. Megha Pandey, 053 3. Meekala Nikitha, 054 4. Manas Mondal, 056 5. Nachiket Bapat, 057Abhilash MallikarjunaNessuna valutazione finora
- Electric Arc Furnace: RefractoryDocumento5 pagineElectric Arc Furnace: RefractoryAbhilash MallikarjunaNessuna valutazione finora
- MATLAB Basics For Beginner PDFDocumento34 pagineMATLAB Basics For Beginner PDFAbhilash MallikarjunaNessuna valutazione finora
- Control Statements in MATLAB: The Decision Making Control Statements Permit To Select andDocumento34 pagineControl Statements in MATLAB: The Decision Making Control Statements Permit To Select andnarun9895152299Nessuna valutazione finora
- Matlab Chapter 1Documento65 pagineMatlab Chapter 1Abhilash MallikarjunaNessuna valutazione finora
- 1st Sem Ppt-BuckBoostDocumento7 pagine1st Sem Ppt-BuckBoostAbhilash MallikarjunaNessuna valutazione finora
- Matlab PDFDocumento34 pagineMatlab PDFAbhilash MallikarjunaNessuna valutazione finora
- Control Statements in MATLAB: The Decision Making Control Statements Permit To Select andDocumento34 pagineControl Statements in MATLAB: The Decision Making Control Statements Permit To Select andnarun9895152299Nessuna valutazione finora
- Charge Controller TopologyDocumento23 pagineCharge Controller TopologyAbhilash MallikarjunaNessuna valutazione finora
- Charge Controller TopologiesDocumento23 pagineCharge Controller TopologiesAbhilash MallikarjunaNessuna valutazione finora
- Corirubber: Cori Engineers Private LimitedDocumento1 paginaCorirubber: Cori Engineers Private LimitedVivace SystmNessuna valutazione finora
- Pro ESEDocumento2 paginePro ESEquadhirababilNessuna valutazione finora
- Bedia CLS 40 45 GBDocumento36 pagineBedia CLS 40 45 GBkadir kayaNessuna valutazione finora
- Mv324 Data SheetDocumento17 pagineMv324 Data SheetGianmarco CastilloNessuna valutazione finora
- Mds Ti-Alloy Ta15 0720 enDocumento3 pagineMds Ti-Alloy Ta15 0720 enshahin_723Nessuna valutazione finora
- ME361 - Manufacturing Science Technology: Measurements and MetrologyDocumento20 pagineME361 - Manufacturing Science Technology: Measurements and MetrologyKartikeyaNessuna valutazione finora
- Thermal Engineering PDFDocumento5 pagineThermal Engineering PDFabhinavgiri17Nessuna valutazione finora
- White Paper: Professor Dr. Thorsten Hens Msc. Ba Anna MeierDocumento29 pagineWhite Paper: Professor Dr. Thorsten Hens Msc. Ba Anna MeierDark11Nessuna valutazione finora
- 310 011 SDocumento34 pagine310 011 SvigneshwaranmNessuna valutazione finora
- Abstract of Talk by Dr. Nitin Oke For National Conference RLTDocumento2 pagineAbstract of Talk by Dr. Nitin Oke For National Conference RLTnitinNessuna valutazione finora
- TransistorDocumento1 paginaTransistorXhaNessuna valutazione finora
- Math 138 Functional Analysis Notes PDFDocumento159 pagineMath 138 Functional Analysis Notes PDFAidan HolwerdaNessuna valutazione finora
- Vdocuments - MX - Catalogo Maquinas Despiezables de Feedback PDFDocumento4 pagineVdocuments - MX - Catalogo Maquinas Despiezables de Feedback PDFHelder NascimentoNessuna valutazione finora
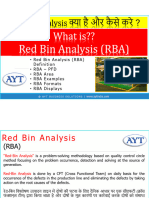
- Red Bin Analysis PDF Notes - 10020477 - 2023 - 10 - 13 - 09 - 28Documento7 pagineRed Bin Analysis PDF Notes - 10020477 - 2023 - 10 - 13 - 09 - 28Sameer SutarNessuna valutazione finora
- Medium Voltage Swgr9Documento3 pagineMedium Voltage Swgr9kjfensNessuna valutazione finora
- Lab Report Instructions - Isolation of Cinnamaldehyde - SP16Documento4 pagineLab Report Instructions - Isolation of Cinnamaldehyde - SP16Al SharptonNessuna valutazione finora
- Cross-Cultural Validation of The Scales For Outcomes in Parkinson's Disease-Psychosocial Questionnaire (SCOPA-PS) in Four Latin American CountriesDocumento7 pagineCross-Cultural Validation of The Scales For Outcomes in Parkinson's Disease-Psychosocial Questionnaire (SCOPA-PS) in Four Latin American Countriesfozia hayyatNessuna valutazione finora
- Immediate Settlement Analysis Using Finite Element Analysis Models of Fb-MultipierDocumento22 pagineImmediate Settlement Analysis Using Finite Element Analysis Models of Fb-MultipierRaaf RifandiNessuna valutazione finora
- Laboratory Work 1 Computation of Metrics of Productivity of Computer SystemDocumento12 pagineLaboratory Work 1 Computation of Metrics of Productivity of Computer SystemHhhhhh75% (4)
- Deflection of BeamsDocumento109 pagineDeflection of BeamsNadir Khattak Jr.100% (1)
- Cswip Appendix 01Documento23 pagineCswip Appendix 01Nsidibe Michael EtimNessuna valutazione finora
- Effect of Salinity On Proteins in Some Wheat CultivarsDocumento9 pagineEffect of Salinity On Proteins in Some Wheat Cultivarsray m deraniaNessuna valutazione finora
- 4 A Short History of Islamic Science From Genesis To Decline ShortversionDocumento24 pagine4 A Short History of Islamic Science From Genesis To Decline ShortversionKateryna KuslyvaNessuna valutazione finora
- Method Statement For Fabrication of Concrete StairsDocumento10 pagineMethod Statement For Fabrication of Concrete StairsDenver Vera MendozaNessuna valutazione finora
- Fred Steckling - We Discovered Alien Bases On The Moon (Transl From German)Documento166 pagineFred Steckling - We Discovered Alien Bases On The Moon (Transl From German)ethan01194% (18)
- TEK SAP 08 SodtwareArch ShowfilesDocumento42 pagineTEK SAP 08 SodtwareArch Showfilesapi-3759021Nessuna valutazione finora
- Grade Sheet BlankDocumento50 pagineGrade Sheet BlankCarlo Troy AcelottNessuna valutazione finora
- Alcatel 4029 EngDocumento31 pagineAlcatel 4029 Engafsanto2000Nessuna valutazione finora
- Assignment and Exam Content: Always Delete Your Cloud Resources To Avoid $$ ChargesDocumento11 pagineAssignment and Exam Content: Always Delete Your Cloud Resources To Avoid $$ ChargesMouhamadou NdiayeNessuna valutazione finora
- Chap. 1 Part 1 Physical PropertiesDocumento15 pagineChap. 1 Part 1 Physical PropertiesAishwarrya NarayananNessuna valutazione finora