Potrebbero piacerti anche
- A2 OscillationsDocumento39 pagineA2 Oscillationssadi muroNessuna valutazione finora
- AC Circuit Ch 31: Resistors, Inductors, Capacitors & RMSDocumento88 pagineAC Circuit Ch 31: Resistors, Inductors, Capacitors & RMSsygwapoooNessuna valutazione finora
- OscillationsDocumento39 pagineOscillationsMurugan.SubramaniNessuna valutazione finora
- Angular Motion and Simple Harmonic Motion ConceptsDocumento48 pagineAngular Motion and Simple Harmonic Motion ConceptsAna Hidayah Syuhada100% (1)
- Damped Simple Harmonic Motion: Department of Physics and Nanotechnology SRM Institute of Science and TechnologyDocumento16 pagineDamped Simple Harmonic Motion: Department of Physics and Nanotechnology SRM Institute of Science and TechnologyRohan MohataNessuna valutazione finora
- Assignment 3Documento15 pagineAssignment 3Jofy GeorgeNessuna valutazione finora
- Coupled Pendula With "Measure-Dynamics": P2132580 Phywe Systeme GMBH & Co. KG © All Rights Reserved 1Documento15 pagineCoupled Pendula With "Measure-Dynamics": P2132580 Phywe Systeme GMBH & Co. KG © All Rights Reserved 1Barthélemy HoubenNessuna valutazione finora
- AC Voltage Controller Classification and Control StrategiesDocumento6 pagineAC Voltage Controller Classification and Control StrategiesTuhin ShahNessuna valutazione finora
- Active Filtering Control Schemes: Imitation Measured CurrentsDocumento16 pagineActive Filtering Control Schemes: Imitation Measured CurrentskamuikNessuna valutazione finora
- The Filter Transfer FunctionDocumento9 pagineThe Filter Transfer FunctionalfredomatiasrojoNessuna valutazione finora
- Typical Aircraft Open-Loop Motions - Longitudinal Modes - Impact of ActuatorsDocumento15 pagineTypical Aircraft Open-Loop Motions - Longitudinal Modes - Impact of Actuatorsgredre113Nessuna valutazione finora
- CH 10Documento29 pagineCH 10Ardian20Nessuna valutazione finora
- Module 2 (AC Circuit)Documento23 pagineModule 2 (AC Circuit)Sattwik MannaNessuna valutazione finora
- Chapter 15 Oscillations: 15.1 Simple Harmonic OscillationDocumento8 pagineChapter 15 Oscillations: 15.1 Simple Harmonic OscillationAditya Narayan SwainNessuna valutazione finora
- Lecture 24: Rolling: Dept. of Mechanical Engg., NIT CalicutDocumento15 pagineLecture 24: Rolling: Dept. of Mechanical Engg., NIT CalicutManoj MallickNessuna valutazione finora
- JEEADV2017P1 SolutionsDocumento14 pagineJEEADV2017P1 SolutionsSUNIL KUMAR JANGRANessuna valutazione finora
- Lecture 17Documento21 pagineLecture 17narvan.m31Nessuna valutazione finora
- MOD 2 LECTURE - 22 Induction Motor Transients and DynamicsDocumento14 pagineMOD 2 LECTURE - 22 Induction Motor Transients and DynamicsChandra SekharNessuna valutazione finora
- Torque - Slip Characteristic of A Three - Phase Induction MachineDocumento28 pagineTorque - Slip Characteristic of A Three - Phase Induction MachineAli AltahirNessuna valutazione finora
- Dependence of The Basic Dynamic Parameters On The Disturbing Force of The Impact Impulse Type With Different FormsDocumento9 pagineDependence of The Basic Dynamic Parameters On The Disturbing Force of The Impact Impulse Type With Different FormsAKAN PETERNessuna valutazione finora
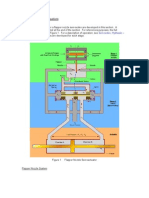
- Equations for a Flapper Nozzle ServovalveDocumento13 pagineEquations for a Flapper Nozzle Servovalvesharanmech100% (4)
- FluidmechanicsDocumento62 pagineFluidmechanicsNadiaa AdjoviNessuna valutazione finora
- ζ z z z x iy µ x iy: Joukowski AirfoilsDocumento4 pagineζ z z z x iy µ x iy: Joukowski AirfoilsrapidshotNessuna valutazione finora
- AC Circuit AnalysisDocumento45 pagineAC Circuit Analysissodapop1999Nessuna valutazione finora
- Module 3 - Basic Electrical - KtuQbankDocumento42 pagineModule 3 - Basic Electrical - KtuQbankThahir TNessuna valutazione finora
- Week 6 Second Grading General Physics 1 Angular Momentum and Its Conservation, Rotational Work and Kinetic EnergyDocumento3 pagineWeek 6 Second Grading General Physics 1 Angular Momentum and Its Conservation, Rotational Work and Kinetic EnergyAngela AlejandroNessuna valutazione finora
- Chapter 6Documento11 pagineChapter 6kuma alemayehuNessuna valutazione finora
- RL RC CircuitsDocumento29 pagineRL RC CircuitsKrishnaveni Subramani SNessuna valutazione finora
- Presentation On Synchronous Machine Model: Tandin Jamtsho STUDENT #3226091Documento30 paginePresentation On Synchronous Machine Model: Tandin Jamtsho STUDENT #3226091Parameswararao BillaNessuna valutazione finora
- Power System Stability AnalysisDocumento112 paginePower System Stability Analysisid.danlard5282Nessuna valutazione finora
- Fundamental Concepts of Electrical Energy SystemsDocumento33 pagineFundamental Concepts of Electrical Energy SystemsLin ChongNessuna valutazione finora
- Madsen Transport Boltztrap PDFDocumento38 pagineMadsen Transport Boltztrap PDFANDREANessuna valutazione finora
- Ee366 Chap 4 2Documento28 pagineEe366 Chap 4 2Michael Adu-boahen50% (2)
- Chapter 10, Oscillations and WavesDocumento4 pagineChapter 10, Oscillations and Wavesnigusayele06Nessuna valutazione finora
- Chapter 9: Frequency-Domain Analysis of Dynamic SystemsDocumento11 pagineChapter 9: Frequency-Domain Analysis of Dynamic SystemsinnoodiraNessuna valutazione finora
- л р 5Documento3 pagineл р 5Mary SwimerNessuna valutazione finora
- MCAT Physics Equations SheetDocumento4 pagineMCAT Physics Equations SheetAshley ShanaéNessuna valutazione finora
- STRC201 Sdof JMWB PDFDocumento99 pagineSTRC201 Sdof JMWB PDFAkash ChandraNessuna valutazione finora
- 1 Single Degree of Freedom (SDOF) Systems: James MW Brownjohn, University of Plymouth, January 2005Documento99 pagine1 Single Degree of Freedom (SDOF) Systems: James MW Brownjohn, University of Plymouth, January 2005Amandeep SinghNessuna valutazione finora
- Function Generators, Oscilloscopes, Resistors in AC Circuits (FG, O-scope, R ACDocumento5 pagineFunction Generators, Oscilloscopes, Resistors in AC Circuits (FG, O-scope, R ACBetül MalkoçNessuna valutazione finora
- Converter Feeding R-L Load AnalysisDocumento33 pagineConverter Feeding R-L Load AnalysisMichael Adu-boahenNessuna valutazione finora
- Midterm Review PDFDocumento16 pagineMidterm Review PDFMt RushNessuna valutazione finora
- AY2010 CE2134 Hydraulics L05 Momentum Equation PT 1Documento7 pagineAY2010 CE2134 Hydraulics L05 Momentum Equation PT 1Emily ShumNessuna valutazione finora
- Cuerpo RigidoDocumento37 pagineCuerpo RigidoByron AyalaNessuna valutazione finora
- 0L3, AC Power AnalysisDocumento5 pagine0L3, AC Power AnalysisZakaria MourtadiNessuna valutazione finora
- A2 41c SHM&OscillationsDocumento47 pagineA2 41c SHM&OscillationsJeffreyNessuna valutazione finora
- Formulas MASDocumento11 pagineFormulas MASOrlando Berbeo LópezNessuna valutazione finora
- Simple Harmonic Motion:: KX MV U KE E A T X T V K MDocumento8 pagineSimple Harmonic Motion:: KX MV U KE E A T X T V K Msoonh jatoiNessuna valutazione finora
- 2 - Chapter 1Documento11 pagine2 - Chapter 1AhmedNessuna valutazione finora
- CH 4 - Principles of Power SystemDocumento19 pagineCH 4 - Principles of Power SystemAqsa KhanamNessuna valutazione finora
- Lecture 3Documento5 pagineLecture 3nakulNessuna valutazione finora
- Oscillations: (University Physics, Vol. 1, Openstax)Documento25 pagineOscillations: (University Physics, Vol. 1, Openstax)JIGGONINessuna valutazione finora
- Boddeker's PHY132 Lecture14Documento4 pagineBoddeker's PHY132 Lecture14bitconcepts9781Nessuna valutazione finora
- Tutorial 3Documento2 pagineTutorial 3veadesh sureshNessuna valutazione finora
- Understanding simple harmonic motionDocumento42 pagineUnderstanding simple harmonic motionSUBIR KUMAR DasNessuna valutazione finora
- Wind Energy Conversion Systems KD7011 Project ReportDocumento13 pagineWind Energy Conversion Systems KD7011 Project ReportMah EshNessuna valutazione finora
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Da EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Nessuna valutazione finora
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Da EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Nessuna valutazione finora
- DOTView HandlerDocumento14 pagineDOTView HandlerXahid HasanNessuna valutazione finora
- HFJInductive Sensors For Marine Engines Ver2100dpi-1Documento2 pagineHFJInductive Sensors For Marine Engines Ver2100dpi-1Va KiNessuna valutazione finora
- Flamability DiagramDocumento2 pagineFlamability DiagramXahid HasanNessuna valutazione finora
- Scav Manifold Inspection. PDFDocumento2 pagineScav Manifold Inspection. PDFXahid HasanNessuna valutazione finora
- Scavenge Fire PDFDocumento3 pagineScavenge Fire PDFXahid HasanNessuna valutazione finora
- CO2 System Operation in Machinery SpacesDocumento2 pagineCO2 System Operation in Machinery SpacesXahid HasanNessuna valutazione finora
- Chemical Tanker & TypesDocumento1 paginaChemical Tanker & TypesXahid HasanNessuna valutazione finora
- Score Candidate Name Cadet NO Program/Department Course TitleDocumento2 pagineScore Candidate Name Cadet NO Program/Department Course TitleXahid HasanNessuna valutazione finora
- Chemical Cargo Sampling:: Significance of Cargo Samples For The Chemical and Physical Analysis ?Documento2 pagineChemical Cargo Sampling:: Significance of Cargo Samples For The Chemical and Physical Analysis ?Xahid HasanNessuna valutazione finora
- Reasons of Static Electricity GenerationDocumento16 pagineReasons of Static Electricity GenerationXahid HasanNessuna valutazione finora
- Trim (15042020)Documento2 pagineTrim (15042020)Xahid HasanNessuna valutazione finora
- Safety of Scavenge Space InspectionDocumento1 paginaSafety of Scavenge Space InspectionXahid HasanNessuna valutazione finora
- Sample Questions Lecture-1 (RACT) PDFDocumento1 paginaSample Questions Lecture-1 (RACT) PDFXahid HasanNessuna valutazione finora
- Bangladesh Marine Academy, Chattogram: 3rd Semester Part A: Lecturer Evaluation FormDocumento2 pagineBangladesh Marine Academy, Chattogram: 3rd Semester Part A: Lecturer Evaluation FormXahid HasanNessuna valutazione finora
- Leaks in The SystemDocumento4 pagineLeaks in The SystemXahid HasanNessuna valutazione finora
- Working Principle of A D.C Motor or How A D.C Motor RotatesDocumento3 pagineWorking Principle of A D.C Motor or How A D.C Motor RotatesXahid HasanNessuna valutazione finora
- Bangladesh Marine Academy, Chattogram: 3rd Semester Part A: Lecturer Evaluation FormDocumento2 pagineBangladesh Marine Academy, Chattogram: 3rd Semester Part A: Lecturer Evaluation FormXahid HasanNessuna valutazione finora
- Scav Manifold Inspection. PDFDocumento2 pagineScav Manifold Inspection. PDFXahid HasanNessuna valutazione finora
- Bow ThrusterDocumento3 pagineBow ThrusterXahid HasanNessuna valutazione finora
- Scavenging in Diesel Engines: Satisfactory Scavenging Depends OnDocumento2 pagineScavenging in Diesel Engines: Satisfactory Scavenging Depends OnXahid HasanNessuna valutazione finora
- Major Elements of Refrigeration System and Their FunctionsDocumento8 pagineMajor Elements of Refrigeration System and Their FunctionsXahid HasanNessuna valutazione finora
- What is a scavenge fireDocumento3 pagineWhat is a scavenge fireXahid HasanNessuna valutazione finora
- Tanker TerminologyDocumento25 pagineTanker TerminologyXahid HasanNessuna valutazione finora
- Bow ThrusterDocumento3 pagineBow ThrusterXahid HasanNessuna valutazione finora
- Rotary Vane GearDocumento2 pagineRotary Vane GearXahid HasanNessuna valutazione finora
- Working Principle of A D.C Motor or How A D.C Motor RotatesDocumento3 pagineWorking Principle of A D.C Motor or How A D.C Motor RotatesXahid HasanNessuna valutazione finora
- Rotary Vane GearDocumento2 pagineRotary Vane GearXahid HasanNessuna valutazione finora
- Inclining Experiment (05042020)Documento6 pagineInclining Experiment (05042020)Xahid HasanNessuna valutazione finora
- Necessity and Utilization of Direct CurrentDocumento6 pagineNecessity and Utilization of Direct CurrentXahid HasanNessuna valutazione finora
- Free Surface Effect On Ships (03042020)Documento3 pagineFree Surface Effect On Ships (03042020)Xahid HasanNessuna valutazione finora
- Ccievoicelabs Real Lab 1Documento20 pagineCcievoicelabs Real Lab 1Anonymous 1OlQQ3cWNessuna valutazione finora
- Ssees DissertationDocumento5 pagineSsees DissertationBuyAcademicPapersCanada100% (1)
- Scitech 101 Course Pack Final Revision Edited 8-11-2021Documento111 pagineScitech 101 Course Pack Final Revision Edited 8-11-2021Zendee Jade MaderaNessuna valutazione finora
- Act 1 Scene 1 Script 1Documento3 pagineAct 1 Scene 1 Script 1api-551719156Nessuna valutazione finora
- Seán Ó HEochaidhDocumento3 pagineSeán Ó HEochaidhJoakamaster 16Nessuna valutazione finora
- Jurisidiction of MeTC, MTC, MCTC, MuTCDocumento3 pagineJurisidiction of MeTC, MTC, MCTC, MuTCKENEDY FLORESNessuna valutazione finora
- GR 11 SLK Pe 1 Week 2 1ST Sem PDFDocumento10 pagineGR 11 SLK Pe 1 Week 2 1ST Sem PDFwinslet villanuevaNessuna valutazione finora
- Motivation and Frustration: Understanding the Causes and Types of ConflictDocumento6 pagineMotivation and Frustration: Understanding the Causes and Types of ConflictKamlakar Sadavarte100% (1)
- The Experiences and Challenges Faced of The Public School Teachers Amidst The COVID-19 Pandemic: A Phenomenological Study in The PhilippinesDocumento21 pagineThe Experiences and Challenges Faced of The Public School Teachers Amidst The COVID-19 Pandemic: A Phenomenological Study in The PhilippinesDE LOS REYES MARY ZEALANessuna valutazione finora
- Fano - Description of States in Qunatum Mechanics by Density Matrix and OperatorsDocumento20 pagineFano - Description of States in Qunatum Mechanics by Density Matrix and OperatorsAlexNessuna valutazione finora
- Bivariate Lagrange InterpolationDocumento11 pagineBivariate Lagrange InterpolationThiago NobreNessuna valutazione finora
- QDEGNSWDocumento2 pagineQDEGNSWSnehin PoddarNessuna valutazione finora
- Maghrib Time Nairobi - Google SearchDocumento1 paginaMaghrib Time Nairobi - Google SearchHanan AliNessuna valutazione finora
- Clinical Psychopathology PDFDocumento5 pagineClinical Psychopathology PDFelvinegunawan50% (2)
- LightingDocumento157 pagineLightingtalibanindonesiaNessuna valutazione finora
- Ais 9 ImDocumento117 pagineAis 9 ImSimonNisjaPutraZai100% (1)
- Genealogy On June 09-2003Documento25 pagineGenealogy On June 09-2003syedyusufsam92100% (3)
- Vida 7Documento32 pagineVida 7Silvia Rodriguez100% (1)
- 101 Poisons Guide for D&D PlayersDocumento16 pagine101 Poisons Guide for D&D PlayersmighalisNessuna valutazione finora
- Summary of Verb TensesDocumento4 pagineSummary of Verb TensesRamir Y. LiamusNessuna valutazione finora
- Michigan History-Lesson 3Documento4 pagineMichigan History-Lesson 3api-270156002Nessuna valutazione finora
- Section 504 Sample Accommodations and Modifications: Examples of General AccommodationsDocumento16 pagineSection 504 Sample Accommodations and Modifications: Examples of General AccommodationsRukhsana KhanNessuna valutazione finora
- Chronic Laryngitis in CHU Yalgado Ouedraogo: Epidemiological and Diagnostic AspectsDocumento4 pagineChronic Laryngitis in CHU Yalgado Ouedraogo: Epidemiological and Diagnostic AspectsMarlina ElvianaNessuna valutazione finora
- Introduction To ErgonomicsDocumento16 pagineIntroduction To Ergonomicsnatrix029Nessuna valutazione finora
- List of As... SimilesDocumento3 pagineList of As... SimilesFara ZahariNessuna valutazione finora
- Code of EthicsDocumento8 pagineCode of EthicsviorelNessuna valutazione finora
- Sermon 7 - Friendship and Fellowship of The Gospel - Part 6 - Philemon 7Documento32 pagineSermon 7 - Friendship and Fellowship of The Gospel - Part 6 - Philemon 7Rob WilkersonNessuna valutazione finora
- Contact: 10 Archana Aboli, Lane 13, V G Kale Path, 850 Bhandarkar Road, Pune-411004Documento12 pagineContact: 10 Archana Aboli, Lane 13, V G Kale Path, 850 Bhandarkar Road, Pune-411004immNessuna valutazione finora
- EMship Course ContentDocumento82 pagineEMship Course ContentBecirspahic Almir100% (1)
- Permissions Problems - DeniedDocumento5 paginePermissions Problems - DeniedGeo KalNessuna valutazione finora