Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Periodic Table Lab AnswersDocumento3 paginePeriodic Table Lab AnswersIdan LevyNessuna valutazione finora
- Cummins: ISX15 CM2250Documento17 pagineCummins: ISX15 CM2250haroun100% (4)
- Report Template For Major Project For B Dot Tech SRM Institute of Science and TechnologyDocumento22 pagineReport Template For Major Project For B Dot Tech SRM Institute of Science and TechnologyMm ImraanNessuna valutazione finora
- Ferrero A.M. Et Al. (2015) - Experimental Tests For The Application of An Analytical Model For Flexible Debris Flow Barrier Design PDFDocumento10 pagineFerrero A.M. Et Al. (2015) - Experimental Tests For The Application of An Analytical Model For Flexible Debris Flow Barrier Design PDFEnrico MassaNessuna valutazione finora
- Automotive Front Lightining Future MobilityDocumento37 pagineAutomotive Front Lightining Future MobilityMm ImraanNessuna valutazione finora
- Modelling and Evaluation of Ride Handling Control Systems: A.R. PIRASATH RAJH (Reg No: RA1411011010067Documento60 pagineModelling and Evaluation of Ride Handling Control Systems: A.R. PIRASATH RAJH (Reg No: RA1411011010067Mm ImraanNessuna valutazione finora
- I28 Kshitij Soni RA1411011010111 - Project Report - 2 PDFDocumento53 pagineI28 Kshitij Soni RA1411011010111 - Project Report - 2 PDFMm ImraanNessuna valutazione finora
- NEWSDocumento229 pagineNEWSМарат АлексеевNessuna valutazione finora
- Tensor Flow Installation Guide PDFDocumento41 pagineTensor Flow Installation Guide PDFMm ImraanNessuna valutazione finora
- Tensor Flow Installation Guide PDFDocumento41 pagineTensor Flow Installation Guide PDFMm ImraanNessuna valutazione finora
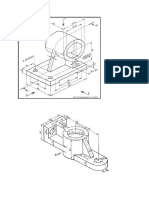
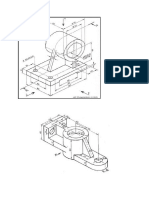
- 3D Drawing Practise by SolidworksDocumento3 pagine3D Drawing Practise by SolidworksMm ImraanNessuna valutazione finora
- 2D Drawing Practise SolidworksDocumento3 pagine2D Drawing Practise SolidworksMm ImraanNessuna valutazione finora
- 3D Drawing Practise by SolidworksDocumento3 pagine3D Drawing Practise by SolidworksMm ImraanNessuna valutazione finora
- Maskote WB Zinc Stop-OffDocumento7 pagineMaskote WB Zinc Stop-OffbondsivamaniNessuna valutazione finora
- Te-Chemical Sem5 CPNM-CBCGS Dec19Documento2 pagineTe-Chemical Sem5 CPNM-CBCGS Dec19Mayank ShelarNessuna valutazione finora
- Review Course 2 (Review On Professional Education Courses)Documento8 pagineReview Course 2 (Review On Professional Education Courses)Regie MarcosNessuna valutazione finora
- Essay On Stem CellsDocumento4 pagineEssay On Stem CellsAdrien G. S. WaldNessuna valutazione finora
- Banin Cawu 1: Panitia Ujian Perguruan Islam Mathali'Ul FalahDocumento4 pagineBanin Cawu 1: Panitia Ujian Perguruan Islam Mathali'Ul FalahKajen PatiNessuna valutazione finora
- Kingroon ConfiguracoesDocumento3 pagineKingroon ConfiguracoesanafrancaNessuna valutazione finora
- Aex-Kissan KeralaDocumento25 pagineAex-Kissan Keralabsh08070Nessuna valutazione finora
- PedagogicalDocumento94 paginePedagogicalEdson MorenoNessuna valutazione finora
- Technical Rockwell Automation FactoryTalk HistorianDocumento6 pagineTechnical Rockwell Automation FactoryTalk HistorianAmit MishraNessuna valutazione finora
- 03 IGT-Influence of Codes Guidelines and Other Regulations On The Tunnel Design in AustriaDocumento48 pagine03 IGT-Influence of Codes Guidelines and Other Regulations On The Tunnel Design in AustriaSudarshan GadalkarNessuna valutazione finora
- Present Perfect Simp ContDocumento14 paginePresent Perfect Simp ContLauGalindo100% (1)
- Richardson ResumeDocumento3 pagineRichardson Resumeapi-549248694Nessuna valutazione finora
- Batron: 29 5 MM Character Height LCD Modules 29Documento1 paginaBatron: 29 5 MM Character Height LCD Modules 29Diego OliveiraNessuna valutazione finora
- Swot Analysis of Indian EconomyDocumento2 pagineSwot Analysis of Indian EconomymyeyesrbeautNessuna valutazione finora
- Jy992d66901 CDocumento6 pagineJy992d66901 CMaitry ShahNessuna valutazione finora
- PV Power To Methane: Draft Assignment 2Documento13 paginePV Power To Methane: Draft Assignment 2Ardiansyah ARNessuna valutazione finora
- Entrepreneurial MotivationDocumento18 pagineEntrepreneurial MotivationRagavendra RagsNessuna valutazione finora
- Nursing Assessment in Family Nursing PracticeDocumento22 pagineNursing Assessment in Family Nursing PracticeHydra Olivar - PantilganNessuna valutazione finora
- Structure of NABARD Grade ADocumento7 pagineStructure of NABARD Grade ARojalin PaniNessuna valutazione finora
- Nbme NotesDocumento3 pagineNbme NotesShariq AkramNessuna valutazione finora
- Antenatal Care (ANC)Documento77 pagineAntenatal Care (ANC)tareNessuna valutazione finora
- Democracy or Aristocracy?: Yasir MasoodDocumento4 pagineDemocracy or Aristocracy?: Yasir MasoodAjmal KhanNessuna valutazione finora
- The Teacher Research Movement: A Decade Later: Cite This PaperDocumento13 pagineThe Teacher Research Movement: A Decade Later: Cite This PaperAlexandre NecromanteionNessuna valutazione finora
- P D P: C I D, C M: Design of Coastal RoadsDocumento55 pagineP D P: C I D, C M: Design of Coastal RoadsMohammedNessuna valutazione finora
- Calendar of Activities A.Y. 2015-2016: 12 Independence Day (Regular Holiday)Documento3 pagineCalendar of Activities A.Y. 2015-2016: 12 Independence Day (Regular Holiday)Beny TawanNessuna valutazione finora
- Pipe Freezing StudyDocumento8 paginePipe Freezing StudymirekwaznyNessuna valutazione finora
- Royal British College Dancesport TeamDocumento10 pagineRoyal British College Dancesport TeamAnna rose CabatinganNessuna valutazione finora