Potrebbero piacerti anche
- ACE Platforms 0801Documento4 pagineACE Platforms 0801Ruslan ZakirovNessuna valutazione finora
- Second Symposium On Naval HydrodynamicsDocumento579 pagineSecond Symposium On Naval Hydrodynamicsjdinvestor100% (1)
- Inland & Maritime Waterways & Ports: Proceedings of the Technical SessionsDa EverandInland & Maritime Waterways & Ports: Proceedings of the Technical SessionsNessuna valutazione finora
- ICOMIA Standard 36 88Documento2 pagineICOMIA Standard 36 88Germán AguirrezabalaNessuna valutazione finora
- Reading 1 - Science - BIOL105 - Disease - ResponseDocumento9 pagineReading 1 - Science - BIOL105 - Disease - ResponsemykrohNessuna valutazione finora
- Calculation of Load Capacity of Shafts and Axles: Supplementary 1 To DIN 743Documento8 pagineCalculation of Load Capacity of Shafts and Axles: Supplementary 1 To DIN 743Karthik VaidhyanathanNessuna valutazione finora
- Marine Rudders and Control Surfaces: Principles, Data, Design and ApplicationsDa EverandMarine Rudders and Control Surfaces: Principles, Data, Design and ApplicationsValutazione: 4.5 su 5 stelle4.5/5 (3)
- Numerical Models for Submerged Breakwaters: Coastal Hydrodynamics and MorphodynamicsDa EverandNumerical Models for Submerged Breakwaters: Coastal Hydrodynamics and MorphodynamicsNessuna valutazione finora
- Steel Floating Dry DocksDocumento46 pagineSteel Floating Dry Dockshks1209Nessuna valutazione finora
- Modular Approach To Offshore VesselDocumento105 pagineModular Approach To Offshore VesselGEORGE.K.CNessuna valutazione finora
- Your Propulsion Experts: Nav Schottel NavigatorDocumento8 pagineYour Propulsion Experts: Nav Schottel NavigatorMustafa TemelNessuna valutazione finora
- Dry Dock AnalysisDocumento149 pagineDry Dock AnalysisYoseph BirruNessuna valutazione finora
- Resistance of Transom-Stern Craft in The Pre-Planing RegimeDocumento104 pagineResistance of Transom-Stern Craft in The Pre-Planing RegimeNick ChappleNessuna valutazione finora
- Atlantic Raven: Registration MachineryDocumento3 pagineAtlantic Raven: Registration MachineryArief KurniawanNessuna valutazione finora
- Speedpowerofship 00 TayluoftDocumento328 pagineSpeedpowerofship 00 TayluoftEko W PerkasaNessuna valutazione finora
- Calculation For Hull Strength Construction in Offshore Structures PDFDocumento10 pagineCalculation For Hull Strength Construction in Offshore Structures PDFcxb07164Nessuna valutazione finora
- Book Nav Us Navy Towing ManualDocumento520 pagineBook Nav Us Navy Towing ManualyayaNessuna valutazione finora
- 125 Ton AHTSSV SpecificationDocumento86 pagine125 Ton AHTSSV SpecificationChakma NhikiNessuna valutazione finora
- A Guide To Fishing Vessel Stability: The Society of Naval Architects and Marine EngineersDocumento59 pagineA Guide To Fishing Vessel Stability: The Society of Naval Architects and Marine EngineersSupun RandeniNessuna valutazione finora
- MaariDocumento2 pagineMaarimyusuf_engineer100% (1)
- Seakeeping CommitteeDocumento56 pagineSeakeeping CommitteeTullio OpattiNessuna valutazione finora
- Gen B-Series Propellers KT-KQ CurvesDocumento115 pagineGen B-Series Propellers KT-KQ CurvesMohd Nyxam100% (1)
- Hiper2010 MelbourneDocumento310 pagineHiper2010 MelbournemaciuluNessuna valutazione finora
- High Speed Craft Load Design PDFDocumento42 pagineHigh Speed Craft Load Design PDFakshayvermaNessuna valutazione finora
- ITTC - Recommended Procedures and Guidelines: Practical Guidelines For Ship Self-Pro-pulsion CFDDocumento10 pagineITTC - Recommended Procedures and Guidelines: Practical Guidelines For Ship Self-Pro-pulsion CFDcataiceNessuna valutazione finora
- SeaBoats ID1127Documento14 pagineSeaBoats ID1127nipper7Nessuna valutazione finora
- Ship Motions in WavesDocumento8 pagineShip Motions in WavesAnonymous e3ceN15Nessuna valutazione finora
- ADA022379 - Tenth Symposium On Naval HydrodynamicsDocumento791 pagineADA022379 - Tenth Symposium On Naval HydrodynamicsYuriyAKNessuna valutazione finora
- MO Aluminium Catamarans Rule Developments Supporting Document V1.0Documento37 pagineMO Aluminium Catamarans Rule Developments Supporting Document V1.0tyu100% (3)
- Seakeeping 19301en2 PDFDocumento2 pagineSeakeeping 19301en2 PDFTullio OpattiNessuna valutazione finora
- Efficient Hull Forms - What Can Be gained-HOLLENBACH - FRIESCH PDFDocumento7 pagineEfficient Hull Forms - What Can Be gained-HOLLENBACH - FRIESCH PDFwaleedyehiaNessuna valutazione finora
- Abs Steel Vessel River RulesDocumento448 pagineAbs Steel Vessel River Rulesluis-12Nessuna valutazione finora
- Max Surf Resistance Hull SpeedDocumento73 pagineMax Surf Resistance Hull SpeedAhmed BelalNessuna valutazione finora
- Brochure Damen Floating Drydocks 06 2015Documento4 pagineBrochure Damen Floating Drydocks 06 2015osamaNessuna valutazione finora
- Cppbdn5101 UagDocumento5 pagineCppbdn5101 Uagkarate hotNessuna valutazione finora
- Vibration of Deckhouse StructuresDocumento10 pagineVibration of Deckhouse StructuresrthyhtNessuna valutazione finora
- Hydrodynamic Analysis Techniques For High-Speed Planing Hulls-Reza YousefiDocumento9 pagineHydrodynamic Analysis Techniques For High-Speed Planing Hulls-Reza YousefiFernandocf90Nessuna valutazione finora
- Boat Design GuidlinesDocumento10 pagineBoat Design GuidlinesSameeraLakmalWickramathilakaNessuna valutazione finora
- 6002 Notes 08 L2Documento34 pagine6002 Notes 08 L2talabizNessuna valutazione finora
- Rulefinder Source Document List 9 - 28Documento66 pagineRulefinder Source Document List 9 - 28Ruano StumpfNessuna valutazione finora
- Savitsky - On The Subject of High Speed MonohullsDocumento44 pagineSavitsky - On The Subject of High Speed MonohullssearchileNessuna valutazione finora
- 1-Ship Lifts and Ro-Ro Ferry RampsDocumento34 pagine1-Ship Lifts and Ro-Ro Ferry RampsRhn RhnNessuna valutazione finora
- 2.2 StabilityDocumento24 pagine2.2 StabilitypothirajkalyanNessuna valutazione finora
- Resistance PDFDocumento96 pagineResistance PDFPutra AdamNessuna valutazione finora
- 2104-Empirical Calculation of Roll Damping For Ships PDFDocumento18 pagine2104-Empirical Calculation of Roll Damping For Ships PDFDennys RamirezNessuna valutazione finora
- Containers in Non Cellular ShipsDocumento7 pagineContainers in Non Cellular Shipsjoeven64Nessuna valutazione finora
- LCT Deck Strength Check (Simulation Only)Documento17 pagineLCT Deck Strength Check (Simulation Only)SanieBurhanNessuna valutazione finora
- My Notes On Savitsky Method PDFDocumento25 pagineMy Notes On Savitsky Method PDFy_596688032Nessuna valutazione finora
- LaunchingDocumento28 pagineLaunchingRolando ArciaNessuna valutazione finora
- On The Hydrodynamics of Stepped Hull PDFDocumento185 pagineOn The Hydrodynamics of Stepped Hull PDFДмитрий КирзуновNessuna valutazione finora
- MC 2011-01 Rules For Wooden Boat W OutriggerDocumento45 pagineMC 2011-01 Rules For Wooden Boat W OutriggerantonalmeidaNessuna valutazione finora
- Dynamic Analysis of Floating Dock Structures PDFDriveDocumento152 pagineDynamic Analysis of Floating Dock Structures PDFDriveKate Jane TajanNessuna valutazione finora
- Initial Ship DesignDocumento37 pagineInitial Ship DesignlakshmiNessuna valutazione finora
- MitDocumento376 pagineMitMark AzzopardiNessuna valutazione finora
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsDa EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNessuna valutazione finora
- Windship Technology: Proceedings of the International Symposium on Windship Technology (WINDTECH ' 85), Southampton, U.K., April 24-25, 1985Da EverandWindship Technology: Proceedings of the International Symposium on Windship Technology (WINDTECH ' 85), Southampton, U.K., April 24-25, 1985C SatchwellNessuna valutazione finora
- Compass and Gyroscope: Integrating Science And Politics For The EnvironmentDa EverandCompass and Gyroscope: Integrating Science And Politics For The EnvironmentNessuna valutazione finora
- Waves on Beaches and Resulting Sediment Transport: Proceedings of an Advanced Seminar, Conducted by the Mathematics Research Center, the University of Wisconsin, and the Coastal Engineering Research Center, U. S. Army, at Madison, October 11–13, 1971Da EverandWaves on Beaches and Resulting Sediment Transport: Proceedings of an Advanced Seminar, Conducted by the Mathematics Research Center, the University of Wisconsin, and the Coastal Engineering Research Center, U. S. Army, at Madison, October 11–13, 1971R. E. MeyerNessuna valutazione finora
- The Finite Element Method for Three-Dimensional Thermomechanical ApplicationsDa EverandThe Finite Element Method for Three-Dimensional Thermomechanical ApplicationsNessuna valutazione finora
- Dynamic positioning The Ultimate Step-By-Step GuideDa EverandDynamic positioning The Ultimate Step-By-Step GuideValutazione: 5 su 5 stelle5/5 (1)
- Ageing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityDa EverandAgeing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityNessuna valutazione finora
- Planing Is BunkumDocumento12 paginePlaning Is BunkumGermán AguirrezabalaNessuna valutazione finora
- Fishing Boats - Donald BlountDocumento22 pagineFishing Boats - Donald BlountGermán AguirrezabalaNessuna valutazione finora
- Taking The Mystery Out of Speed PredictionsDocumento9 pagineTaking The Mystery Out of Speed PredictionsGermán AguirrezabalaNessuna valutazione finora
- Passenger Comfort On Board Motor YachtsDocumento11 paginePassenger Comfort On Board Motor YachtsGermán AguirrezabalaNessuna valutazione finora
- Mooring BuoyDocumento3 pagineMooring BuoyGermán AguirrezabalaNessuna valutazione finora
- Boat Data BookDocumento5 pagineBoat Data BookGermán Aguirrezabala100% (1)
- Jack Up TestDocumento3 pagineJack Up TestGermán AguirrezabalaNessuna valutazione finora
- Safety of Floating Drydocks in Accordance With Mil-Std-1625aDocumento10 pagineSafety of Floating Drydocks in Accordance With Mil-Std-1625aGermán AguirrezabalaNessuna valutazione finora
- Manual EVK SealDocumento18 pagineManual EVK Sealpanamajack26Nessuna valutazione finora
- Marine Propulsion For Small CraftsDocumento71 pagineMarine Propulsion For Small CraftsGermán Aguirrezabala100% (1)
- Multiple Vessel Dry Docking PDFDocumento5 pagineMultiple Vessel Dry Docking PDFGermán AguirrezabalaNessuna valutazione finora
- RablDocumento2 pagineRablGermán AguirrezabalaNessuna valutazione finora
- Speed Boat DevelopmentsDocumento18 pagineSpeed Boat DevelopmentsGermán AguirrezabalaNessuna valutazione finora
- Resume of P Sateesh Kumar PDFDocumento6 pagineResume of P Sateesh Kumar PDFsateesh kumarNessuna valutazione finora
- MR - Mentoring EE Educators Towards PEEEngr. Cirilo Calibjo Nov. 27 2015Documento74 pagineMR - Mentoring EE Educators Towards PEEEngr. Cirilo Calibjo Nov. 27 2015ramelNessuna valutazione finora
- Rizal MidtermsDocumento15 pagineRizal MidtermsJerick JusayNessuna valutazione finora
- Watson 2015Documento5 pagineWatson 2015Perlyn Del Pilar OduyaNessuna valutazione finora
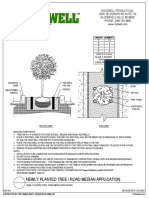
- Newly Planted Tree / Road Median ApplicationDocumento1 paginaNewly Planted Tree / Road Median ApplicationmooolkaNessuna valutazione finora
- The Theory of Reasoned ActionDocumento2 pagineThe Theory of Reasoned ActionAisha Vidya TriyandaniNessuna valutazione finora
- Danik Bhaskar Jaipur 05-24-2014Documento28 pagineDanik Bhaskar Jaipur 05-24-2014bhaskar_newsNessuna valutazione finora
- Fronte 1Documento45 pagineFronte 1Patty HMNessuna valutazione finora
- Project Mana Session 1 (With Practice)Documento59 pagineProject Mana Session 1 (With Practice)Harper LamNessuna valutazione finora
- Heater & Air ConditionerDocumento104 pagineHeater & Air ConditionerMusat Catalin-Marian100% (1)
- Medical Development PowerPoint TemplateDocumento16 pagineMedical Development PowerPoint TemplatesugamNessuna valutazione finora
- 10 Reasons FullDocumento17 pagine10 Reasons FullMikaš MatkoNessuna valutazione finora
- S GD&ĐT Daklak: A. B. C. DDocumento4 pagineS GD&ĐT Daklak: A. B. C. DNhung Nguyen HongNessuna valutazione finora
- Sixth Sense TechnologyDocumento36 pagineSixth Sense TechnologyMahtab ANessuna valutazione finora
- Ice305 Lab5Documento13 pagineIce305 Lab5Arnab SarkerNessuna valutazione finora
- Argidius Call For BDS ProposalDocumento8 pagineArgidius Call For BDS ProposalEmmanuel Alenga MakhetiNessuna valutazione finora
- Data Communication and Computer Networks (EIE418) : Prof. E. Adetiba (PH.D, R.Engr. (COREN) )Documento52 pagineData Communication and Computer Networks (EIE418) : Prof. E. Adetiba (PH.D, R.Engr. (COREN) )John DavidNessuna valutazione finora
- Multiphase FlowDocumento80 pagineMultiphase FlowAnjo VasquezNessuna valutazione finora
- Module 2.1 Cultural Relativism-1Documento20 pagineModule 2.1 Cultural Relativism-1Blad AnneNessuna valutazione finora
- Pakistan Academy School Al-Ahmadi Kuwait Monthly Test Schedule Class: AS-LEVELDocumento9 paginePakistan Academy School Al-Ahmadi Kuwait Monthly Test Schedule Class: AS-LEVELapi-126472277Nessuna valutazione finora
- A Report: Smt. Shantaben Haribhai Gajera Engineering CollegeDocumento5 pagineA Report: Smt. Shantaben Haribhai Gajera Engineering CollegePranav. ThubeNessuna valutazione finora
- PDFDocumento764 paginePDFDe JavuNessuna valutazione finora
- Social Construction of DisasterDocumento385 pagineSocial Construction of DisasterPratik Kumar BandyopadhyayNessuna valutazione finora
- Exam2SampleProblems SP17 - 1507832832437Documento5 pagineExam2SampleProblems SP17 - 1507832832437rohitrgt4uNessuna valutazione finora
- Fairchild Ll4007 PDFDocumento1 paginaFairchild Ll4007 PDFKathyNessuna valutazione finora
- Lesson 3 (MODULE 1) : Ge Elec 3 Living in The I.T. EraDocumento10 pagineLesson 3 (MODULE 1) : Ge Elec 3 Living in The I.T. EraVincent CyrusNessuna valutazione finora
- MODULE-11 Human Person As Oriented Towards Their Impending DeathDocumento18 pagineMODULE-11 Human Person As Oriented Towards Their Impending DeathRoyceNessuna valutazione finora
- Candy System Functionalities ListDocumento4 pagineCandy System Functionalities ListPauloKupesaNessuna valutazione finora