Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- W L ReviewDocumento11 pagineW L Reviewغزوان عماد الدين الحسينيNessuna valutazione finora
- Questions Class 10 - Science CBSEDocumento9 pagineQuestions Class 10 - Science CBSEViolet TsirblouNessuna valutazione finora
- UV-TVC4516-2292-L03: 1. Product IntroductionDocumento4 pagineUV-TVC4516-2292-L03: 1. Product IntroductionLeonardo MaciasNessuna valutazione finora
- Commscope RVVPX306 - 11RDocumento4 pagineCommscope RVVPX306 - 11Rburxes100% (1)
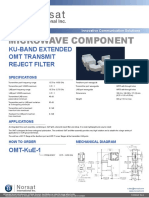
- Omt Kue 1 Spec SheetDocumento1 paginaOmt Kue 1 Spec Sheetappex onlineNessuna valutazione finora
- Investigation of Fine Structure of Textile FibreDocumento12 pagineInvestigation of Fine Structure of Textile FibreSuyash Manmohan100% (1)
- MY-ROCKET-H308-4518R24-M - VERSION - 2019 Con AntenasDocumento3 pagineMY-ROCKET-H308-4518R24-M - VERSION - 2019 Con AntenasIgnacio Garcia LopezNessuna valutazione finora
- Syllabus B.tech PDFDocumento92 pagineSyllabus B.tech PDFhoney singhNessuna valutazione finora
- WaveDocumento5 pagineWaveHutaNessuna valutazione finora
- Elsewedy Catalogue 2019Documento132 pagineElsewedy Catalogue 2019Moustafa Mahmoud0% (1)
- Nexcope - NX40M Full PDFDocumento5 pagineNexcope - NX40M Full PDFAlesson DezaneNessuna valutazione finora
- ND Filters Guide PDFDocumento11 pagineND Filters Guide PDFluisangelotNessuna valutazione finora
- Beer'S Law Lab: Explore The Beer's Law Screen For A Few Minutes. Try To Figure Out What All of The Controls Show and DoDocumento2 pagineBeer'S Law Lab: Explore The Beer's Law Screen For A Few Minutes. Try To Figure Out What All of The Controls Show and Dodebbie bongNessuna valutazione finora
- WAVE PROPERTIES OF LIGHT Chapter - 19Documento26 pagineWAVE PROPERTIES OF LIGHT Chapter - 19JonNessuna valutazione finora
- Etr 30001e01pDocumento25 pagineEtr 30001e01pSulaiman HasanNessuna valutazione finora
- TM Mode in Circular WaveguideDocumento17 pagineTM Mode in Circular Waveguidemark markNessuna valutazione finora
- Mca. Turck Mod. QS18VP6LVDocumento3 pagineMca. Turck Mod. QS18VP6LVSkay LopilNessuna valutazione finora
- MFJ-931 Instruction Manual Artificial RF GroundDocumento5 pagineMFJ-931 Instruction Manual Artificial RF GroundOctavian S.Nessuna valutazione finora
- Multi-Wavelength View of The Galactic Black-Hole Binary GRS 1716-249Documento11 pagineMulti-Wavelength View of The Galactic Black-Hole Binary GRS 1716-249Debasish SahaNessuna valutazione finora
- White Paper - Fuel DyesDocumento7 pagineWhite Paper - Fuel DyesArchana Balikram RNessuna valutazione finora
- Micro Z ULS Tier3 Lo Res Book Brochure en Ver1 2016.08.31Documento4 pagineMicro Z ULS Tier3 Lo Res Book Brochure en Ver1 2016.08.31Sergio Ramirez RamirezNessuna valutazione finora
- Rakesh 10330404 MTech ThesisDocumento101 pagineRakesh 10330404 MTech ThesisLuluNessuna valutazione finora
- Optical Full Units NOTESDocumento98 pagineOptical Full Units NOTESkohilavaniapNessuna valutazione finora
- Nonthermal Processing of FoodDocumento122 pagineNonthermal Processing of FoodervaishaliNessuna valutazione finora
- Digital Infrared Photography ManualDocumento352 pagineDigital Infrared Photography ManualOl RebNessuna valutazione finora
- Daily Stock Posistion 23-05-2022Documento3 pagineDaily Stock Posistion 23-05-2022Chinyere BerthaNessuna valutazione finora
- How To Design Efficient Street Lighting - (Part-3)Documento17 pagineHow To Design Efficient Street Lighting - (Part-3)JIMMY ANTONYNessuna valutazione finora
- Stereo Microscopes enDocumento16 pagineStereo Microscopes enLeandro Silva SantosNessuna valutazione finora
- 2013 Theory of Antirelativity Eric DollardDocumento13 pagine2013 Theory of Antirelativity Eric DollardJR2017100% (3)
- Tim 2007acrysof - RestorDocumento22 pagineTim 2007acrysof - Restorghitza80Nessuna valutazione finora