Potrebbero piacerti anche
- 008B Protocolos Comunicacion Industrial Basado Ethernet LabviewDocumento51 pagine008B Protocolos Comunicacion Industrial Basado Ethernet LabviewEdgar Maya PerezNessuna valutazione finora
- Para Implementar Las Buenas Prácticas Agrícolas en La Producción de PlátanoDocumento2 paginePara Implementar Las Buenas Prácticas Agrícolas en La Producción de PlátanoWilmer Peña Aguirre100% (1)
- Competencias Del Ingeniero BiomédicoDocumento10 pagineCompetencias Del Ingeniero BiomédicoSandy Paola RojasNessuna valutazione finora
- Responsabilidades y funciones de supervisión de KarenDocumento3 pagineResponsabilidades y funciones de supervisión de KarenRolando SanchezNessuna valutazione finora
- 1 Cuestionario Guía EvaluaciónDocumento28 pagine1 Cuestionario Guía EvaluaciónSalomon Elias Chavez SucasaireNessuna valutazione finora
- DIMENSIONES DE LADRILLOS - Búsqueda de GoogleDocumento3 pagineDIMENSIONES DE LADRILLOS - Búsqueda de GoogleManuel Uriel PeraltaNessuna valutazione finora
- Propuesta de Centro de Alumnos de Ingeniería Comercial Lista ADocumento20 paginePropuesta de Centro de Alumnos de Ingeniería Comercial Lista AListaACAAICOMNessuna valutazione finora
- Actividad 1 Estadisticas JuGVDocumento9 pagineActividad 1 Estadisticas JuGVJuan Antonio Martin GutierrezNessuna valutazione finora
- Manual para Moldajes para Hormigon-Estudio y Aplicacion en Empresas Consrtructoras ChileDocumento147 pagineManual para Moldajes para Hormigon-Estudio y Aplicacion en Empresas Consrtructoras Chiledragados72821Nessuna valutazione finora
- Onyx Solar Soluciones AsiDocumento4 pagineOnyx Solar Soluciones AsiJOHN EDINSON ORDOÑEZ CARDENASNessuna valutazione finora
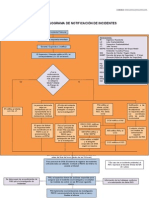
- Flujograma Notificación IncidentesDocumento1 paginaFlujograma Notificación IncidentesMiguel Soto EspinozaNessuna valutazione finora
- GUÍA ELABORACIÓN DE PERFIL IDÓNEO DE INGRESO Y EGRESO Julio 24Documento22 pagineGUÍA ELABORACIÓN DE PERFIL IDÓNEO DE INGRESO Y EGRESO Julio 24pedromanuelguerreroNessuna valutazione finora
- Caso 4 IncovsaDocumento8 pagineCaso 4 IncovsaBryan RodasNessuna valutazione finora
- Caldera YCRTDocumento9 pagineCaldera YCRTOPISantaCruzNessuna valutazione finora
- Sobre "Culturas Hibridas. Estrategias para Entrar y Salir... " (Reseña)Documento7 pagineSobre "Culturas Hibridas. Estrategias para Entrar y Salir... " (Reseña)Jesús Martín Barbero100% (1)
- Atenex Inicio Rapido Componentes Herramienta V4Documento11 pagineAtenex Inicio Rapido Componentes Herramienta V4Andres NagosNessuna valutazione finora
- 8.2.señales de CirculaciónDocumento23 pagine8.2.señales de CirculaciónFABIO SCIELZO ORTIZNessuna valutazione finora
- Proyecto Terminado III ParcialDocumento35 pagineProyecto Terminado III ParcialNelson Alfredo Jaco RodriguezNessuna valutazione finora
- Clasificacion y Especificiones de Las Unidades de AlbañileriaDocumento27 pagineClasificacion y Especificiones de Las Unidades de AlbañileriajavierNessuna valutazione finora
- Ciclos de vida de un SI para mejorar el archivo de la Universidad de PamplonaDocumento6 pagineCiclos de vida de un SI para mejorar el archivo de la Universidad de PamplonaOscar Ivan MirandaNessuna valutazione finora
- 605 659 PB PDFDocumento359 pagine605 659 PB PDFMaribel Caricari Zurita100% (1)
- Agua en Las EdificacionesDocumento32 pagineAgua en Las Edificacioneslukassk1Nessuna valutazione finora
- Sensor de Nivel Ultrasonico UFMDocumento6 pagineSensor de Nivel Ultrasonico UFMGustavo OspinoNessuna valutazione finora
- Manual Gestión NECDocumento33 pagineManual Gestión NECyorkaef57100% (1)
- Estaciones de Bombeo y Lineas de ImpulcionDocumento24 pagineEstaciones de Bombeo y Lineas de ImpulcionBryan BarzalloNessuna valutazione finora
- Oscar Palacios CV 2014Documento14 pagineOscar Palacios CV 2014OscarMPalaciosNessuna valutazione finora
- Memoria Descriptiv CalzadurasDocumento3 pagineMemoria Descriptiv CalzadurasCarlos VivancoNessuna valutazione finora
- Principios de La Delegación EfectivaDocumento2 paginePrincipios de La Delegación Efectivamiguel2830100% (1)
- A2 DVMHDocumento10 pagineA2 DVMHvanistel vanistelNessuna valutazione finora
- 03-Catálogo Goulds-SSH PDFDocumento36 pagine03-Catálogo Goulds-SSH PDFPaul WaldronNessuna valutazione finora