Potrebbero piacerti anche
- 03 Nabhi PDFDocumento9 pagine03 Nabhi PDFBharat PremNessuna valutazione finora
- Jones2013 Article LaptopEnergy-savingOpportunitiDocumento7 pagineJones2013 Article LaptopEnergy-savingOpportunitiBharat PremNessuna valutazione finora
- KtuDocumento3 pagineKtuBharat PremNessuna valutazione finora
- Centrifugal Pump Impeller Vane ProfileDocumento32 pagineCentrifugal Pump Impeller Vane Profiletomsiri100% (1)
- Bms College of Engineering (Autonomous College of Engineering Under Vtu)Documento7 pagineBms College of Engineering (Autonomous College of Engineering Under Vtu)Bharat PremNessuna valutazione finora
- Bharath Sundar Rajan: ObjectiveDocumento1 paginaBharath Sundar Rajan: ObjectiveBharat PremNessuna valutazione finora
- AIM-To Setup Flow Over Backward Facing Step: For Three Different Mesh SizesDocumento8 pagineAIM-To Setup Flow Over Backward Facing Step: For Three Different Mesh SizesBharat PremNessuna valutazione finora
- AbstractDocumento2 pagineAbstractBharat PremNessuna valutazione finora
- Compressor HandbookDocumento104 pagineCompressor Handbookvincent100% (1)
- The Design of A Thermoelectric Generator and Its Medical ApplicationsDocumento26 pagineThe Design of A Thermoelectric Generator and Its Medical ApplicationsBharat PremNessuna valutazione finora
- اینترنت اشیاDocumento248 pagineاینترنت اشیاBharat PremNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
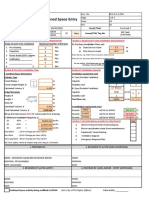
- Ventilation Plan For Confined Space EntryDocumento9 pagineVentilation Plan For Confined Space EntryMohamad Nazmi Mohamad Rafian100% (1)
- How many times do clock hands overlap in a dayDocumento6 pagineHow many times do clock hands overlap in a dayabhijit2009Nessuna valutazione finora
- This Study Resource Was: Practice Questions and Answers Inventory Management: EOQ ModelDocumento7 pagineThis Study Resource Was: Practice Questions and Answers Inventory Management: EOQ Modelwasif ahmedNessuna valutazione finora
- Dinosaur Bones - American Museum of Natural HistoryDocumento7 pagineDinosaur Bones - American Museum of Natural HistoryNicholas FeatherstonNessuna valutazione finora
- Transmission Line Surge Impedance Loading ExplainedDocumento3 pagineTransmission Line Surge Impedance Loading ExplainedviksoniNessuna valutazione finora
- QO™ Load Centers - QO124M200PDocumento4 pagineQO™ Load Centers - QO124M200PIsraelNessuna valutazione finora
- Crones Student Teacher Lesson 1 1Documento7 pagineCrones Student Teacher Lesson 1 1api-530321748Nessuna valutazione finora
- Trade ReportDocumento6 pagineTrade ReportIKEOKOLIE HOMEPCNessuna valutazione finora
- International Financial Management 7th Edition Eun Test BankDocumento25 pagineInternational Financial Management 7th Edition Eun Test BankMatthewRosarioksdf100% (58)
- WHLP in Reading and Writing Week 8Documento4 pagineWHLP in Reading and Writing Week 8Manuel Despabiladeras0% (2)
- Wellmark Series 2600 PDFDocumento6 pagineWellmark Series 2600 PDFHomar Hernández JuncoNessuna valutazione finora
- Intermediate Financial Management 13th Edition Brigham Test BankDocumento25 pagineIntermediate Financial Management 13th Edition Brigham Test BankMonicaHoustonwjtgz100% (56)
- MECHANICAL ENGINEERING DEPARTMENT - Copy (Repaired)Documento10 pagineMECHANICAL ENGINEERING DEPARTMENT - Copy (Repaired)Wan Mohd AfnanNessuna valutazione finora
- Geometric Design of Highways for Optimal Traffic FlowDocumento123 pagineGeometric Design of Highways for Optimal Traffic FlowGadisa TeferaNessuna valutazione finora
- Properties of Skeletal MuscleDocumento72 pagineProperties of Skeletal MuscleAakash GohilNessuna valutazione finora
- ISO 9000 Audit Checklist for Quality Management SystemsDocumento28 pagineISO 9000 Audit Checklist for Quality Management SystemsphilipalexjonesNessuna valutazione finora
- Open Newel StaircaseDocumento4 pagineOpen Newel StaircaseSujan Dhoj KhadkaNessuna valutazione finora
- Building Resilience Philippines Urban PoorDocumento16 pagineBuilding Resilience Philippines Urban PoorYasmin Pheebie BeltranNessuna valutazione finora
- H07RN-F, Enhanced Version: Product InformationDocumento5 pagineH07RN-F, Enhanced Version: Product InformationDarwin YupaNessuna valutazione finora
- Earthquake Faults and Tectonic Plate Boundaries ExplainedDocumento21 pagineEarthquake Faults and Tectonic Plate Boundaries ExplainedAngelo RemeticadoNessuna valutazione finora
- VSP BrochureDocumento33 pagineVSP BrochuresudhakarrrrrrNessuna valutazione finora
- Understand Shell and Rib Feature - Creo Elements ProDocumento8 pagineUnderstand Shell and Rib Feature - Creo Elements ProWaqas AhmadNessuna valutazione finora
- Physics Chapter 2 Original TestDocumento6 paginePhysics Chapter 2 Original TestJanina OrmitaNessuna valutazione finora
- Air Blue E-TicketDocumento1 paginaAir Blue E-TicketMuneeb Ahmed100% (3)
- Kamran Afzal ResumeDocumento2 pagineKamran Afzal ResumeChelsea ElizabethNessuna valutazione finora
- Porter's Five Forces: Submitted by Subham Chakraborty PGDMDocumento5 paginePorter's Five Forces: Submitted by Subham Chakraborty PGDMSubham ChakrabortyNessuna valutazione finora
- 5054 s09 QP 1Documento20 pagine5054 s09 QP 1Hany ElGezawyNessuna valutazione finora
- GIYA Classroom VisitationDocumento4 pagineGIYA Classroom VisitationRussell Moralla100% (2)
- PowerFlex 4M LabDocumento22 paginePowerFlex 4M Labmaria laura delgado morenoNessuna valutazione finora
- 1SM6 2015Documento63 pagine1SM6 2015chikoo499Nessuna valutazione finora